S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Bagpipe LV 1-5Document228 paginiBagpipe LV 1-5Sathia Kdms100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Mathematics KeyDocument353 paginiMathematics KeyDebasisMohapatra100% (3)
- Fulltext01 Matlab Code For Elasticity y Plasticity PDFDocument115 paginiFulltext01 Matlab Code For Elasticity y Plasticity PDFRory Cristian Cordero RojoÎncă nu există evaluări
- Maritime Management SystemsDocument105 paginiMaritime Management SystemsAndika AntakaÎncă nu există evaluări
- Uusci 2009 007Document194 paginiUusci 2009 007DebasisMohapatraÎncă nu există evaluări
- Nature of Soil-Water Characteristics Curves (SWCC) For Soils From Anbar GovernorateDocument21 paginiNature of Soil-Water Characteristics Curves (SWCC) For Soils From Anbar GovernorateDebasisMohapatraÎncă nu există evaluări
- An Improved Contact Algorithm For The Material PoiDocument15 paginiAn Improved Contact Algorithm For The Material PoiDebasisMohapatraÎncă nu există evaluări
- GeomeasureDocument14 paginiGeomeasureDebasisMohapatraÎncă nu există evaluări
- Jgeot 18 P 103-1Document15 paginiJgeot 18 P 103-1DebasisMohapatraÎncă nu există evaluări
- Tunnel IDocument13 paginiTunnel IDebasisMohapatraÎncă nu există evaluări
- S C S C: Fig. 4 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForDocument1 paginăS C S C: Fig. 4 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForDebasisMohapatraÎncă nu există evaluări
- Fig. 1. (A) Initial 3D Problem (B) Homogenized 2D ProblemDocument1 paginăFig. 1. (A) Initial 3D Problem (B) Homogenized 2D ProblemDebasisMohapatraÎncă nu există evaluări
- TR322Document15 paginiTR322DebasisMohapatraÎncă nu există evaluări
- S C S C: Fig. 5 The Cross-Sectional View of The Macroscopic Strength Envelope For The Composite MaterialDocument1 paginăS C S C: Fig. 5 The Cross-Sectional View of The Macroscopic Strength Envelope For The Composite MaterialDebasisMohapatraÎncă nu există evaluări
- Soga - Critical StateDocument13 paginiSoga - Critical StateDebasisMohapatraÎncă nu există evaluări
- Lect2 LPSDP3Document31 paginiLect2 LPSDP3DebasisMohapatraÎncă nu există evaluări
- Figure 2Document1 paginăFigure 2DebasisMohapatraÎncă nu există evaluări
- S C S C: Fig. 3 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForDocument1 paginăS C S C: Fig. 3 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForDebasisMohapatraÎncă nu există evaluări
- Ns FEM LIUDocument14 paginiNs FEM LIUDebasisMohapatraÎncă nu există evaluări
- Fig. 1 (A) Initial 3D Problem (B) Homogenized 2D ProblemDocument1 paginăFig. 1 (A) Initial 3D Problem (B) Homogenized 2D ProblemDebasisMohapatraÎncă nu există evaluări
- Figure 2Document1 paginăFigure 2DebasisMohapatraÎncă nu există evaluări
- Accent Training: - Neutralization - American - British 30 HrsDocument1 paginăAccent Training: - Neutralization - American - British 30 HrsShah PatelÎncă nu există evaluări
- 1 s2.0 S MainDocument14 pagini1 s2.0 S MainDebasisMohapatraÎncă nu există evaluări
- Smoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsDocument39 paginiSmoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsDebasisMohapatraÎncă nu există evaluări
- Smoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsDocument39 paginiSmoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsDebasisMohapatraÎncă nu există evaluări
- Computers and Geotechnics: Research PaperDocument15 paginiComputers and Geotechnics: Research PaperDebasisMohapatraÎncă nu există evaluări
- 3d Footing UbDocument13 pagini3d Footing UbDebasisMohapatraÎncă nu există evaluări
- MIT Ub SOCPDocument111 paginiMIT Ub SOCPDebasisMohapatraÎncă nu există evaluări
- Earthquake EN PDFDocument128 paginiEarthquake EN PDFDebasisMohapatraÎncă nu există evaluări
- Introduction To Mesh in MatlabDocument18 paginiIntroduction To Mesh in MatlablinoÎncă nu există evaluări
- Lower Bound Limit Analysis Using Finite Elements and Linear OptimizationDocument23 paginiLower Bound Limit Analysis Using Finite Elements and Linear OptimizationDebasisMohapatraÎncă nu există evaluări
- MMW ReviewerDocument3 paginiMMW ReviewerMarcSaloj NeryÎncă nu există evaluări
- MSDS DowthermDocument4 paginiMSDS DowthermfebriantabbyÎncă nu există evaluări
- GSD Puppy Training Essentials PDFDocument2 paginiGSD Puppy Training Essentials PDFseja saulÎncă nu există evaluări
- Dairy Products Theory XIIDocument152 paginiDairy Products Theory XIIDskÎncă nu există evaluări
- LinkageDocument9 paginiLinkageHarshu JunghareÎncă nu există evaluări
- Automatic Train OperationDocument6 paginiAutomatic Train OperationAnupam KhandelwalÎncă nu există evaluări
- 9A02502 Transmission of Electric PowerDocument6 pagini9A02502 Transmission of Electric PowersivabharathamurthyÎncă nu există evaluări
- GB GW01 14 04 02Document2 paginiGB GW01 14 04 02Muhammad LukmanÎncă nu există evaluări
- Ap, Lrrsisal of Roentgenograph, Ic: I SsayDocument30 paginiAp, Lrrsisal of Roentgenograph, Ic: I SsayMindaugasStacevičiusÎncă nu există evaluări
- Concrete Super Structure ReportDocument43 paginiConcrete Super Structure ReportLivian TeddyÎncă nu există evaluări
- Wildlife Emergency and Critical CareDocument14 paginiWildlife Emergency and Critical CareRayssa PereiraÎncă nu există evaluări
- The Practical Reference Guide ForDocument4 paginiThe Practical Reference Guide Forelias667Încă nu există evaluări
- RD Sharma Class8 SolutionsDocument2 paginiRD Sharma Class8 Solutionsncertsoluitons100% (2)
- Principles Involved in Baking 1Document97 paginiPrinciples Involved in Baking 1Milky BoyÎncă nu există evaluări
- Conquest CXAX Air-to-Water Heat PumpDocument6 paginiConquest CXAX Air-to-Water Heat PumpAlexandre LopesÎncă nu există evaluări
- 1 Circuit TheoryDocument34 pagini1 Circuit TheoryLove StrikeÎncă nu există evaluări
- EXAMPLE 8.6 Veneer Grades and RepairsDocument2 paginiEXAMPLE 8.6 Veneer Grades and RepairsnickÎncă nu există evaluări
- Exercise On Word Formation 2 (Unit 2 - Advanced) : Tran Dai Nghia High School For The GiftedDocument3 paginiExercise On Word Formation 2 (Unit 2 - Advanced) : Tran Dai Nghia High School For The GiftedEveryonehateshiuzo 2.0Încă nu există evaluări
- Đề 17Document11 paginiĐề 17Nguyen CuongÎncă nu există evaluări
- Statics: Vector Mechanics For EngineersDocument39 paginiStatics: Vector Mechanics For EngineersVijay KumarÎncă nu există evaluări
- Investigation of Skew Curved Bridges in Combination With Skewed Abutments Under Seismic ResponseDocument5 paginiInvestigation of Skew Curved Bridges in Combination With Skewed Abutments Under Seismic ResponseEditor IJTSRDÎncă nu există evaluări
- Integration ConceptDocument34 paginiIntegration ConceptJANELLA ALVAREZÎncă nu există evaluări
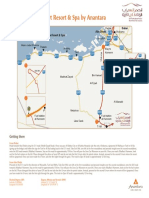
- Qasr Al Sarab Desert Resort Location Map June2012Document1 paginăQasr Al Sarab Desert Resort Location Map June2012Anant GârgÎncă nu există evaluări
- 2017 Classification of Periodontal and Peri-Implant Diseases and Conditions. Decision Making Algorithms For Clinical PracticeDocument40 pagini2017 Classification of Periodontal and Peri-Implant Diseases and Conditions. Decision Making Algorithms For Clinical PracticebbÎncă nu există evaluări
- Test 2 Sku3023 A201 QuestionDocument8 paginiTest 2 Sku3023 A201 QuestionHafiz HafizanÎncă nu există evaluări
- Contoh CV / Daftar Riwayat HidupDocument2 paginiContoh CV / Daftar Riwayat HiduprusmansyahÎncă nu există evaluări
- YoungMan EN131 GUIDEDocument16 paginiYoungMan EN131 GUIDErcpawar100% (1)
- Veronte Autopilot Kit DatasheetDocument2 paginiVeronte Autopilot Kit DatasheetEkmedzicÎncă nu există evaluări