S-ar putea să vă placă și
- Understanding Integrating ADC AN1041Document7 paginiUnderstanding Integrating ADC AN1041dileepank14Încă nu există evaluări
- Inter Grating AdcDocument6 paginiInter Grating AdcthắngÎncă nu există evaluări
- Analog To Digital Converter PDFDocument4 paginiAnalog To Digital Converter PDFtowfiqeeeÎncă nu există evaluări
- Dual Slope AdcDocument5 paginiDual Slope AdcvishvinnyÎncă nu există evaluări
- MT-020: ADC Architectures I: The Flash Converter: by Walt KesterDocument15 paginiMT-020: ADC Architectures I: The Flash Converter: by Walt KesterlewiszenÎncă nu există evaluări
- Analog To Digital ConverterDocument11 paginiAnalog To Digital ConverterFf Fr100% (1)
- The Integrating A/D Converter (ICL7135) : Application Note February 1999Document5 paginiThe Integrating A/D Converter (ICL7135) : Application Note February 1999ytnateÎncă nu există evaluări
- Chapter 1 IntroductionDocument39 paginiChapter 1 IntroductionNivedini KuttiÎncă nu există evaluări
- A Basic Guide To The AC Specifications of ADCsDocument28 paginiA Basic Guide To The AC Specifications of ADCsuser123phcÎncă nu există evaluări
- Design of An ADC Using High Precision Comparator With Time Domain Offset CancellationDocument4 paginiDesign of An ADC Using High Precision Comparator With Time Domain Offset CancellationijtetjournalÎncă nu există evaluări
- Fig 1.1. ADC As An Interface Between Physical World and Digital ProcessorsDocument51 paginiFig 1.1. ADC As An Interface Between Physical World and Digital ProcessorsSupriyo SrimaniÎncă nu există evaluări
- Implementation of A Low-Kickback-Noise Latched Comparator For High-Speed Analog-To-Digital Designs in 0.18Document15 paginiImplementation of A Low-Kickback-Noise Latched Comparator For High-Speed Analog-To-Digital Designs in 0.18TJPRC Publications100% (1)
- Analog To Digital ConvertersDocument11 paginiAnalog To Digital Convertersمحمد ماجدÎncă nu există evaluări
- Basics of Digital Dac ConvertersDocument2 paginiBasics of Digital Dac ConvertersALFAKÎncă nu există evaluări
- Analog To Digital ConvertDocument20 paginiAnalog To Digital ConvertluxiaofengÎncă nu există evaluări
- Unit Iv Adc & Dac 2 MarksDocument5 paginiUnit Iv Adc & Dac 2 MarkssasirekhaÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- A 10b 100MS S 1.13mW SAR ADC With Binary-Scaled Error CompensationDocument3 paginiA 10b 100MS S 1.13mW SAR ADC With Binary-Scaled Error Compensation陳昀顥Încă nu există evaluări
- Chapter 4Document23 paginiChapter 4Tejan Kumar SharmaÎncă nu există evaluări
- APSP - Lecture Notes 2Document7 paginiAPSP - Lecture Notes 2Manjula sÎncă nu există evaluări
- Inverters SpecsDocument11 paginiInverters SpecsbhuwaneshtakÎncă nu există evaluări
- Introduction To Analog To Digital Converters (ADC)Document9 paginiIntroduction To Analog To Digital Converters (ADC)diether.gozumÎncă nu există evaluări
- Frequency MeasurementDocument6 paginiFrequency MeasurementDarshan PatelÎncă nu există evaluări
- Sar AdcDocument40 paginiSar AdcNivedini KuttiÎncă nu există evaluări
- Design and Simulation of 1-Bit Sigma-Delta ADC Using Ngspice ToolDocument5 paginiDesign and Simulation of 1-Bit Sigma-Delta ADC Using Ngspice ToolIjarcsee JournalÎncă nu există evaluări
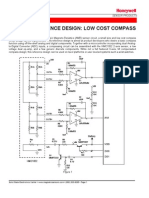
- Reference Design Low Cost CompassDocument4 paginiReference Design Low Cost CompassHany MaximousÎncă nu există evaluări
- Instrumentation AmplifierDocument3 paginiInstrumentation AmplifierFreddy LlusionÎncă nu există evaluări
- An Analysis and Design of High Performance Power Consumption Double Tail Comparator Using Gated Clock and Power Gating TechniquesDocument7 paginiAn Analysis and Design of High Performance Power Consumption Double Tail Comparator Using Gated Clock and Power Gating TechniquesIJIRSTÎncă nu există evaluări
- Fairchild Lm7805cDocument5 paginiFairchild Lm7805cGautam BalharaÎncă nu există evaluări
- A High Performance 90 NM CMOS SAR ADC With HybridDocument8 paginiA High Performance 90 NM CMOS SAR ADC With HybridSounakDuttaÎncă nu există evaluări
- Slope (Integrating) Adc - Digital-Analog ConversionDocument3 paginiSlope (Integrating) Adc - Digital-Analog ConversionMichael HsiaoÎncă nu există evaluări
- A 1.8V 12-Bit 230-MS/s Pipeline ADC in 0.18 M CMOS TechnologyDocument4 paginiA 1.8V 12-Bit 230-MS/s Pipeline ADC in 0.18 M CMOS Technologyfaithfully_fatihÎncă nu există evaluări
- DAC AnalysisDocument19 paginiDAC Analysisమురళీధర్ ఆది ఆంధ్రుడుÎncă nu există evaluări
- Adc Dac Converter NewDocument50 paginiAdc Dac Converter NewJaya PaulÎncă nu există evaluări
- Differential Analog Data Path DC Offset Calibration MethodsDocument7 paginiDifferential Analog Data Path DC Offset Calibration MethodsLincoln RibeiroÎncă nu există evaluări
- R - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionDocument10 paginiR - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionMiguel BrunoÎncă nu există evaluări
- A 53-nW 9.1-ENOB 1-kS/s SAR ADC in 0.13-m CMOS For Medical Implant DevicesDocument9 paginiA 53-nW 9.1-ENOB 1-kS/s SAR ADC in 0.13-m CMOS For Medical Implant DevicesAshish JoshiÎncă nu există evaluări
- Adc 0808Document6 paginiAdc 0808GokulThalaÎncă nu există evaluări
- 12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsDocument6 pagini12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsThanos van RamÎncă nu există evaluări
- High-Performance D/A-Converters: Application to Digital TransceiversDe la EverandHigh-Performance D/A-Converters: Application to Digital TransceiversÎncă nu există evaluări
- An-742 Application Note: Frequency Domain Response of Switched-Capacitor AdcsDocument8 paginiAn-742 Application Note: Frequency Domain Response of Switched-Capacitor AdcskabuslagakÎncă nu există evaluări
- IEEE - A 1.8V 1MSps Rail-To-Rail 10-Bit SAR ADC in 0.18um CMOS PDFDocument3 paginiIEEE - A 1.8V 1MSps Rail-To-Rail 10-Bit SAR ADC in 0.18um CMOS PDFQuoc Thang TranÎncă nu există evaluări
- Design of A Pipelined 8b 10MSPS Analog To Digital Converter From System To OTADocument22 paginiDesign of A Pipelined 8b 10MSPS Analog To Digital Converter From System To OTAZarion JacobsÎncă nu există evaluări
- Converters: Reference Book: Electrical Measurement & Instrumentation, By-A.K. SawhneyDocument14 paginiConverters: Reference Book: Electrical Measurement & Instrumentation, By-A.K. SawhneyAsheque IqbalÎncă nu există evaluări
- Digital-to-Analog Analog-to-Digital Conversions: Microprocessor InterfaceDocument34 paginiDigital-to-Analog Analog-to-Digital Conversions: Microprocessor Interfaceeugen lupuÎncă nu există evaluări
- Choosing Optmized ADC - Buffer CombinationDocument4 paginiChoosing Optmized ADC - Buffer CombinationJalaj JainÎncă nu există evaluări
- Low Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmaDocument17 paginiLow Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmamanojÎncă nu există evaluări
- THLDL: Wright2Document2 paginiTHLDL: Wright2Dennis AtyugrasiwiÎncă nu există evaluări
- DiDocument6 paginiDipani256Încă nu există evaluări
- 10bit SAR ADCDocument9 pagini10bit SAR ADCKiran Kumar MandrumakaÎncă nu există evaluări
- Optimizing The Number of Bits/Stage in 10-Bit, 50Ms/Sec Pipelined A/D Converter Considering Area, Speed, Power and LinearityDocument7 paginiOptimizing The Number of Bits/Stage in 10-Bit, 50Ms/Sec Pipelined A/D Converter Considering Area, Speed, Power and LinearityronaldomponteÎncă nu există evaluări
- Analog-To-Digital Conversion Btech IIIDocument50 paginiAnalog-To-Digital Conversion Btech IIILisa BhagatÎncă nu există evaluări
- Making Accurate DC Voltage Measurements in The Presence of Series Mode AC SignalsDocument6 paginiMaking Accurate DC Voltage Measurements in The Presence of Series Mode AC SignalsRangga Kusuma NegaraÎncă nu există evaluări
- Design and Implementation of A 10 Bit SAR ADCDocument4 paginiDesign and Implementation of A 10 Bit SAR ADCVipul ChauhanÎncă nu există evaluări
- Presentation - On-Chip Current Sensing Technique For Cmos Monolithic Switch-ModeDocument30 paginiPresentation - On-Chip Current Sensing Technique For Cmos Monolithic Switch-Modesohailasghar_tÎncă nu există evaluări
- Design of A 12-Bit SAR ADC With DigitalDocument4 paginiDesign of A 12-Bit SAR ADC With DigitalY chenÎncă nu există evaluări
- Week 4Document28 paginiWeek 4İBRAHİM YÜMLÜÎncă nu există evaluări
- 09 Chapter1Document20 pagini09 Chapter1SriramÎncă nu există evaluări
- Nyquist-Rate D/A ConvertersDocument3 paginiNyquist-Rate D/A ConvertersAli AhmadÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- WaveletTutorial PDFDocument67 paginiWaveletTutorial PDFdhrghamÎncă nu există evaluări
- VW MK5 Jetta ElectricalSystem SSP 873403Document58 paginiVW MK5 Jetta ElectricalSystem SSP 873403paratonerq100% (2)
- OBD AT Commnads ELM327DS PDFDocument94 paginiOBD AT Commnads ELM327DS PDFclick2klic100% (1)
- Nist Technical Note 1297 SDocument25 paginiNist Technical Note 1297 SRonny Andalas100% (1)
- An1392 Better RMS MeasurementsDocument8 paginiAn1392 Better RMS MeasurementsjulioÎncă nu există evaluări
- Contador BCDDocument2 paginiContador BCDjulioÎncă nu există evaluări
- SAR Cyclic and Integrating ADCsDocument50 paginiSAR Cyclic and Integrating ADCsAlberto DanÎncă nu există evaluări
- Datasheet TC7106-07Document27 paginiDatasheet TC7106-07zelgadis445Încă nu există evaluări
- Embedded Systems DictionaryDocument305 paginiEmbedded Systems DictionaryImranasan100% (1)
- Chapter-3 Instrumentation 2022Document63 paginiChapter-3 Instrumentation 2022thomasazkyÎncă nu există evaluări
- Resistance and Capacitance Meter Using A PIC16C622: Device Program Memory Data MemoryDocument36 paginiResistance and Capacitance Meter Using A PIC16C622: Device Program Memory Data MemoryadilÎncă nu există evaluări
- Measurement Science Exam 30aug2012 Answers EnglishDocument9 paginiMeasurement Science Exam 30aug2012 Answers EnglishAxel PalaciosÎncă nu există evaluări
- Seca769 Service ManualDocument24 paginiSeca769 Service ManualHeinson R. VariasÎncă nu există evaluări
- Getting Started With Timer/Counter Type A (Tca) : View The Atmega4809 Code Example On GithubDocument23 paginiGetting Started With Timer/Counter Type A (Tca) : View The Atmega4809 Code Example On GithubGion AndrásÎncă nu există evaluări
- Electronic Instruments: Working of D'Arsonval MeterDocument30 paginiElectronic Instruments: Working of D'Arsonval MeterKarthik VÎncă nu există evaluări
- TC 7107Document26 paginiTC 7107Wilmar RodriguezÎncă nu există evaluări
- Single Slope AdcDocument2 paginiSingle Slope AdcSneha BorahÎncă nu există evaluări
- Interface Circuits 1987Document1.438 paginiInterface Circuits 1987João AlmeidaÎncă nu există evaluări
- MECH 3211 Lecture 9 - Digital Instrumentation - 2Document29 paginiMECH 3211 Lecture 9 - Digital Instrumentation - 2Ahmed NurÎncă nu există evaluări
- Digital-Circuits Anand-KumarDocument10 paginiDigital-Circuits Anand-Kumaree22.abhishek.kaushikÎncă nu există evaluări
- Assgmient 21 Objetives:: Single-Slope ADC ArchitectureDocument4 paginiAssgmient 21 Objetives:: Single-Slope ADC ArchitectureRodrigo TavarezÎncă nu există evaluări
- Assignment 5 f2016Document6 paginiAssignment 5 f2016phoebezzÎncă nu există evaluări
- Question Bank: RNS Institute of TechnologyDocument15 paginiQuestion Bank: RNS Institute of TechnologyManohar PÎncă nu există evaluări
- 3 Digits LCD Display, 3260-Count A/D For DMM: DescriptionDocument17 pagini3 Digits LCD Display, 3260-Count A/D For DMM: DescriptionDyogo MondegoÎncă nu există evaluări
- Henzler - 2010 - Time-To-Digital Converters PDFDocument132 paginiHenzler - 2010 - Time-To-Digital Converters PDFmimitech mimitechÎncă nu există evaluări
- ELE 312 Measurements and InstrumentationDocument36 paginiELE 312 Measurements and InstrumentationAjiboye MubarakÎncă nu există evaluări
- ADC Design Guide MicrochipDocument0 paginiADC Design Guide MicrochipOrlando MartínÎncă nu există evaluări
- Giraffe Infant Scale: Service ManualDocument40 paginiGiraffe Infant Scale: Service ManualjonathanÎncă nu există evaluări
- Chapter 3 - Signal Conversion and ProcessingDocument64 paginiChapter 3 - Signal Conversion and Processingنوار السيلاويÎncă nu există evaluări
- Chapter 6Document42 paginiChapter 6Henry MaedaÎncă nu există evaluări
- ADCDACDocument180 paginiADCDACKireetiÎncă nu există evaluări
- Chapter 1 HandoutsDocument35 paginiChapter 1 Handoutsmeseret sisayÎncă nu există evaluări
- Adc 1Document29 paginiAdc 1A10-14Rajat KumarÎncă nu există evaluări
- DSP WT1819 Seminar 3 Solution PDFDocument4 paginiDSP WT1819 Seminar 3 Solution PDFTalal AhmadÎncă nu există evaluări
- Analog-to-Digital ConvertersDocument12 paginiAnalog-to-Digital Convertersstreamer akoÎncă nu există evaluări
- S&a MCQ - SveriDocument31 paginiS&a MCQ - Sveritrail meÎncă nu există evaluări