S-ar putea să vă placă și
- Lilin Downhole MotorDocument35 paginiLilin Downhole MotorIAN.SEMUT100% (2)
- Post Tension StructuresDocument10 paginiPost Tension Structurestwinkle4545Încă nu există evaluări
- Pile ReportDocument14 paginiPile ReportChen E LikÎncă nu există evaluări
- GATE RCC & Steel Structures BookDocument12 paginiGATE RCC & Steel Structures BookMims120% (1)
- NEH654 CH14 Gabion Wall Stability Vs031606Document7 paginiNEH654 CH14 Gabion Wall Stability Vs031606DanangÎncă nu există evaluări
- Bridge Design Report - Docx 150Document17 paginiBridge Design Report - Docx 150nephembaniÎncă nu există evaluări
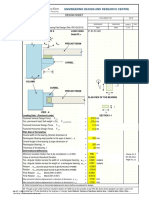
- Design Sheet: View A Load Case= Nodal ID = α F F F Precast BeamDocument5 paginiDesign Sheet: View A Load Case= Nodal ID = α F F F Precast BeamGanesh PrabuÎncă nu există evaluări
- Bosch L Jetronic Injection Technical Instructions PDFDocument40 paginiBosch L Jetronic Injection Technical Instructions PDFjorge Angel LopeÎncă nu există evaluări
- RCC DESIGN OF CANTILEVER CHAJJADocument32 paginiRCC DESIGN OF CANTILEVER CHAJJAjaffnaÎncă nu există evaluări
- Steel Cage Lifting PDFDocument5 paginiSteel Cage Lifting PDFAnonymous S7Cq7ZDgPÎncă nu există evaluări
- Mercury Gemini Program Design Survey. NASA ERC Design Criteria Program Stability, Guidance and ControlDocument217 paginiMercury Gemini Program Design Survey. NASA ERC Design Criteria Program Stability, Guidance and ControlBob Andrepont100% (1)
- Steel Connections-Lacing-Bridge BearingDocument11 paginiSteel Connections-Lacing-Bridge BearingRaheelAfzaalÎncă nu există evaluări
- Sag Slurry PoolingDocument10 paginiSag Slurry PoolingalgroneÎncă nu există evaluări
- Design of RCC Retaing WallDocument12 paginiDesign of RCC Retaing WalldsureshcivilÎncă nu există evaluări
- Mini Project ReportDocument37 paginiMini Project ReportPRAVIN KUMAR NÎncă nu există evaluări
- CE5510B Advanced Structural Concrete Design To EC2: 10. Flat Slab SystemDocument17 paginiCE5510B Advanced Structural Concrete Design To EC2: 10. Flat Slab SystemwinminthetgeoÎncă nu există evaluări
- Compact 200 PDFDocument14 paginiCompact 200 PDFnashapkÎncă nu există evaluări
- Design of Composite Steel Tub Girder - JLDelaCruzDocument72 paginiDesign of Composite Steel Tub Girder - JLDelaCruzChristine LaurdenÎncă nu există evaluări
- Crack Width CheckDocument2 paginiCrack Width CheckJitendra SinghÎncă nu există evaluări
- Bridge Presentation FinalDocument38 paginiBridge Presentation FinalEngineeri TadiyosÎncă nu există evaluări
- Composite Beam DesignDocument33 paginiComposite Beam DesignihpeterÎncă nu există evaluări
- TN-326 Average Pre CompressionDocument3 paginiTN-326 Average Pre CompressionPartha Pratim RoyÎncă nu există evaluări
- Crack Width CalculationsDocument1 paginăCrack Width CalculationsdfdgggÎncă nu există evaluări
- Chapter 10 Design of Prestressed 761661594169023Document15 paginiChapter 10 Design of Prestressed 761661594169023Puzzle ArtsÎncă nu există evaluări
- The Design of Integral BridgesDocument27 paginiThe Design of Integral BridgesBridgy mcbridgeÎncă nu există evaluări
- Crack Width Check BS5400 4Document5 paginiCrack Width Check BS5400 4saravanan4286100% (1)
- Bridge Design FundamentalsDocument67 paginiBridge Design FundamentalsSukrit GhoraiÎncă nu există evaluări
- Dynamic Load Testing of Bridges PDFDocument6 paginiDynamic Load Testing of Bridges PDFankurshah1986Încă nu există evaluări
- Collapse analysis of externally prestressed structuresDe la EverandCollapse analysis of externally prestressed structuresÎncă nu există evaluări
- Tigers Binocular Vision Enables Depth PerceptionDocument5 paginiTigers Binocular Vision Enables Depth PerceptionpaidalaÎncă nu există evaluări
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionDe la EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionÎncă nu există evaluări
- Design A RCC T Beam Girder Bridge To Suit The Following Data - Google SearchDocument1 paginăDesign A RCC T Beam Girder Bridge To Suit The Following Data - Google SearchamitÎncă nu există evaluări
- Is 6006 1983Document22 paginiIs 6006 1983kannankrivÎncă nu există evaluări
- Structure Engineer CertificateDocument1 paginăStructure Engineer CertificateSantosh100% (2)
- CribDocument1 paginăCribskumarsrÎncă nu există evaluări
- Bridge Foundation Design FactorsDocument23 paginiBridge Foundation Design FactorsNisarga KeshavmurthyÎncă nu există evaluări
- (Paper) - Portal Frame PierDocument23 pagini(Paper) - Portal Frame PierShaileshRastogiÎncă nu există evaluări
- Pier Column Design PDFDocument6 paginiPier Column Design PDFJaycee Bareng PagadorÎncă nu există evaluări
- Abutment Design Example To BD 30Document16 paginiAbutment Design Example To BD 30Muzammil Moosafeer100% (1)
- Laterally Loaded Pile Cap ConnectionsDocument151 paginiLaterally Loaded Pile Cap ConnectionschanakyaÎncă nu există evaluări
- Transforming Railways Seismic CodeDocument39 paginiTransforming Railways Seismic CodevigneshrajamanickamÎncă nu există evaluări
- Seismic Arrester DesignDocument14 paginiSeismic Arrester DesignMahendra SuryavanshiÎncă nu există evaluări
- Design of Form Work and Enabling StructuresDocument5 paginiDesign of Form Work and Enabling StructuresPrajwal Shinde PatilÎncă nu există evaluări
- Feasibility Report On Design and Construction of Bridge in The State of MeghalayaDocument7 paginiFeasibility Report On Design and Construction of Bridge in The State of MeghalayaRam KumarÎncă nu există evaluări
- RCBeamOpening v061601Document1 paginăRCBeamOpening v061601kevinlow3Încă nu există evaluări
- NCHRP RPT 519Document202 paginiNCHRP RPT 519Mustafa UzyardoğanÎncă nu există evaluări
- Design Notes For ALL Memebres - Sefi ForumDocument17 paginiDesign Notes For ALL Memebres - Sefi ForumcoolkaisyÎncă nu există evaluări
- Skew Bridges Calculation MethodsDocument9 paginiSkew Bridges Calculation MethodsIsidro P. BuquironÎncă nu există evaluări
- Effe. Section HeightDocument132 paginiEffe. Section HeightNaresh SharmaÎncă nu există evaluări
- 1 - Depth of Fixity of Piles in Clay Under Dynamic Lateral PDFDocument15 pagini1 - Depth of Fixity of Piles in Clay Under Dynamic Lateral PDFSwapan PaulÎncă nu există evaluări
- Crack Width Calculation ExampleDocument3 paginiCrack Width Calculation Examplebernie romeroÎncă nu există evaluări
- Vulnerability Study For Roads and Bridges in KathmanduDocument49 paginiVulnerability Study For Roads and Bridges in KathmanduAshish ShresthaÎncă nu există evaluări
- For Review and Approval: SECTION-1-1Document1 paginăFor Review and Approval: SECTION-1-1Mandar GÎncă nu există evaluări
- Slab Culvert Irc 21 Irc 112Document5 paginiSlab Culvert Irc 21 Irc 112Rupendra palÎncă nu există evaluări
- HMM Infra LTD, Anbala: Design of Trestle (Cribs)Document10 paginiHMM Infra LTD, Anbala: Design of Trestle (Cribs)Anonymous sfkedkymÎncă nu există evaluări
- Optimal Deign of Pile FoundationDocument13 paginiOptimal Deign of Pile FoundationJustin Johnson100% (1)
- 35m DesignDocument160 pagini35m DesignPhanindra NathÎncă nu există evaluări
- Concrete Pull Out Check PDFDocument1 paginăConcrete Pull Out Check PDFMaliki MuhammedÎncă nu există evaluări
- Ultimate Limit State of Induced Deformation - Sec. 11 of IRC 112 J IRC Vo. 76 - 3Document18 paginiUltimate Limit State of Induced Deformation - Sec. 11 of IRC 112 J IRC Vo. 76 - 3Zakee MohamedÎncă nu există evaluări
- IRC:SP:114 Seminar AnnouncementDocument1 paginăIRC:SP:114 Seminar Announcementavisek_basuÎncă nu există evaluări
- Kobe University Repository: KernelDocument27 paginiKobe University Repository: KernelTrầmLãngÎncă nu există evaluări
- A Novel Approach To The Calculation of Pothole-Induced Contact Forces in MDOF Vehicle ModelsDocument36 paginiA Novel Approach To The Calculation of Pothole-Induced Contact Forces in MDOF Vehicle ModelsManjunatha EikilaÎncă nu există evaluări
- Qassim 2020 IOP Conf. Ser. Mater. Sci. Eng. 928 022115Document19 paginiQassim 2020 IOP Conf. Ser. Mater. Sci. Eng. 928 022115Huda AlrikabiÎncă nu există evaluări
- 3D analysis of bridge-vehicle interactionDocument19 pagini3D analysis of bridge-vehicle interactionGiulio PalamàÎncă nu există evaluări
- Readme PDFDocument4 paginiReadme PDFNewton AniguidÎncă nu există evaluări
- 2021 Calendar LightDocument12 pagini2021 Calendar LightDyah Nimas Ayu SekartiÎncă nu există evaluări
- LkjksadlslkdlsDocument4 paginiLkjksadlslkdlsDyah Nimas Ayu SekartiÎncă nu există evaluări
- LkjksadlslkdlsDocument4 paginiLkjksadlslkdlsDyah Nimas Ayu SekartiÎncă nu există evaluări
- 2 SlidesDocument2 pagini2 SlidesDyah Nimas Ayu SekartiÎncă nu există evaluări
- Senin Selasa Thursday Friday Saturday Sunday Monday: Konferensi Orangtua Murid/Guru 19.00Document24 paginiSenin Selasa Thursday Friday Saturday Sunday Monday: Konferensi Orangtua Murid/Guru 19.00Dyah Nimas Ayu SekartiÎncă nu există evaluări
- Drydvbnbn HFCHCFHCFHC Drydvbnbn HFCHCFHCFHCDocument6 paginiDrydvbnbn HFCHCFHCFHC Drydvbnbn HFCHCFHCFHCDyah Nimas Ayu SekartiÎncă nu există evaluări
- Pauli TestDocument10 paginiPauli TestJalan MusafirÎncă nu există evaluări
- Modul 7 Pengecoran Dan Perawatan BetonDocument14 paginiModul 7 Pengecoran Dan Perawatan BetonDyah Nimas Ayu SekartiÎncă nu există evaluări
- Concrete BearringDocument1 paginăConcrete BearringDyah Nimas Ayu SekartiÎncă nu există evaluări
- LaminateDocument154 paginiLaminateAbhishek VaggarÎncă nu există evaluări
- 11 TransportationDocument61 pagini11 TransportationWindi Astuti0% (1)
- Calculation Worksheet PrintDocument7 paginiCalculation Worksheet PrintLovieAlfonsoÎncă nu există evaluări
- 2130606Document24 pagini2130606srinivasan venkatramanÎncă nu există evaluări
- GX200 AdjDocument1 paginăGX200 AdjAngelescuOÎncă nu există evaluări
- Welding Journal PDFDocument7 paginiWelding Journal PDFraisalfiansyahÎncă nu există evaluări
- HW2 Solutions FinalDocument5 paginiHW2 Solutions Finalpande_100Încă nu există evaluări
- E-CAPS-28 - For CoE (XI) - Chemistry - (Que. - Answer Key)Document3 paginiE-CAPS-28 - For CoE (XI) - Chemistry - (Que. - Answer Key)darling deanÎncă nu există evaluări
- Under The Aegis Of: WWW - Ucd.ie/cigrDocument430 paginiUnder The Aegis Of: WWW - Ucd.ie/cigrErin Walker100% (1)
- Mid-Term Math Exam for Grade 5Document18 paginiMid-Term Math Exam for Grade 5李安逸Încă nu există evaluări
- AE342 Lab1 Report Format 20182Document7 paginiAE342 Lab1 Report Format 20182Mert YılmazÎncă nu există evaluări
- 0 Physics SyllabusDocument2 pagini0 Physics Syllabusiffat fatima patilÎncă nu există evaluări
- EagleBurgmann Statotherm P Foil 9591 P enDocument1 paginăEagleBurgmann Statotherm P Foil 9591 P enkeyur1109Încă nu există evaluări
- Wiring DiagramDocument24 paginiWiring DiagramReji Raju0% (1)
- Atlas Copco: Parts ListDocument152 paginiAtlas Copco: Parts ListChathura SenanayakeÎncă nu există evaluări
- Analysis of Milk ComponentsDocument7 paginiAnalysis of Milk Componentsgailluna112795Încă nu există evaluări
- Factors that Determine Paper StrengthDocument23 paginiFactors that Determine Paper StrengthNur Ariesman Salleh100% (2)
- 079322C Int MR LD Int 1543 0004 3427 01Document1 pagină079322C Int MR LD Int 1543 0004 3427 01bolat.kukuzovÎncă nu există evaluări
- The Second Term Exam of EnglishDocument2 paginiThe Second Term Exam of Englishsof chimiste100% (1)
- Stiffness of Cable-Based Parallel Manipulators With Application To Stability AnalysisDocument8 paginiStiffness of Cable-Based Parallel Manipulators With Application To Stability AnalysisNhật MinhÎncă nu există evaluări
- Quatitative Microscopy Cog PDFDocument6 paginiQuatitative Microscopy Cog PDFNiyati GuptaÎncă nu există evaluări
- Generator ProductsDocument16 paginiGenerator Productspatro242Încă nu există evaluări
- Background Glass - Part-2 - Plate CalculationDocument16 paginiBackground Glass - Part-2 - Plate CalculationusonÎncă nu există evaluări
- Rocket PropulsionDocument41 paginiRocket PropulsionV DhinakaranÎncă nu există evaluări