S-ar putea să vă placă și
- Sesión de Aprendizaje #10Document2 paginiSesión de Aprendizaje #10Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #5Document2 paginiSesión de Aprendizaje #5Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #9Document2 paginiSesión de Aprendizaje #9Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #8Document2 paginiSesión de Aprendizaje #8Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #3Document2 paginiSesión de Aprendizaje #3Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #3Document2 paginiSesión de Aprendizaje #3Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #7Document2 paginiSesión de Aprendizaje #7Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #6Document2 paginiSesión de Aprendizaje #6Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #10Document5 paginiSesión de Aprendizaje #10Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #13Document4 paginiSesión de Aprendizaje #13Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #1Document3 paginiSesión de Aprendizaje #1Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #2Document2 paginiSesión de Aprendizaje #2Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #5Document4 paginiSesión de Aprendizaje #5Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #6Document4 paginiSesión de Aprendizaje #6Fidel Andía GuzmánÎncă nu există evaluări
- Clase 2 Introducción ElectrónicaDocument17 paginiClase 2 Introducción Electrónicadecofcb10Încă nu există evaluări
- Clase 3 Modelado de Sistemas Dinámicos PDFDocument36 paginiClase 3 Modelado de Sistemas Dinámicos PDFFidel Andía GuzmánÎncă nu există evaluări
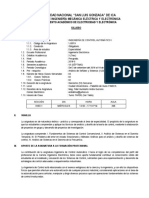
- Silabo Ingeniería de Control Automático Ii 2020-IDocument10 paginiSilabo Ingeniería de Control Automático Ii 2020-IFidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #16Document4 paginiSesión de Aprendizaje #16Fidel Andía GuzmánÎncă nu există evaluări
- Sesión de Aprendizaje #16Document4 paginiSesión de Aprendizaje #16Fidel Andía GuzmánÎncă nu există evaluări
- Plan DeTesis Alonso - MedinaDocument25 paginiPlan DeTesis Alonso - MedinaFidel Andía GuzmánÎncă nu există evaluări
- Trabajo AndiaDocument6 paginiTrabajo AndiaFidel Andía GuzmánÎncă nu există evaluări
- Monografía HuacachinaDocument60 paginiMonografía HuacachinaFidel Andía Guzmán67% (3)
- Plan Manejo Jerárquico de DesechosDocument21 paginiPlan Manejo Jerárquico de DesechosFidel Andía GuzmánÎncă nu există evaluări
- Control Automatico - Viii CicloDocument13 paginiControl Automatico - Viii CicloFidel Andía GuzmánÎncă nu există evaluări
- Cinemática Inversa de Robots ManipuladoresDocument20 paginiCinemática Inversa de Robots ManipuladoresFidel Andía GuzmánÎncă nu există evaluări
- Proyecto de Tesis Andía UNICA SabáticoDocument65 paginiProyecto de Tesis Andía UNICA SabáticoFidel Andía GuzmánÎncă nu există evaluări
- Control RealimentadoDocument6 paginiControl RealimentadoFidel Andía GuzmánÎncă nu există evaluări
- Criterios de Funcionamiento de Control ÓptimoDocument16 paginiCriterios de Funcionamiento de Control ÓptimoFidel Andía GuzmánÎncă nu există evaluări
- Cinemática Inversa de Robots ManipuladoresDocument20 paginiCinemática Inversa de Robots ManipuladoresFidel Andía GuzmánÎncă nu există evaluări
- Sílabo Control I 2018-IIDocument18 paginiSílabo Control I 2018-IIFidel Andía GuzmánÎncă nu există evaluări
- Tomo 08 - Artes DanzaDocument294 paginiTomo 08 - Artes DanzaJuan Ramon OgasÎncă nu există evaluări
- Calendario de Actividades II Semestre 2019Document7 paginiCalendario de Actividades II Semestre 2019Nancy MartinezÎncă nu există evaluări
- Jorgeduardo Espinoza Tarea Diaria Aa (4.10 - 4.12) Pág. 1/3Document3 paginiJorgeduardo Espinoza Tarea Diaria Aa (4.10 - 4.12) Pág. 1/3Dyllan Bastidas100% (1)
- Etapa Contractual 043Document193 paginiEtapa Contractual 043Jeovany bonilla montielÎncă nu există evaluări
- SESIÓN Lectura y Escritura de Números 14-04-23 MATEMÁTICADocument5 paginiSESIÓN Lectura y Escritura de Números 14-04-23 MATEMÁTICACIRO DESIDERIO LAZARO ANTUNEZÎncă nu există evaluări
- Trabajo+de+Grado+Piedad+Molano+Hernandez+c c+52019571Document137 paginiTrabajo+de+Grado+Piedad+Molano+Hernandez+c c+52019571Prieto LuisanaÎncă nu există evaluări
- La Segunda Venida de Cristo1Document2 paginiLa Segunda Venida de Cristo1benjamin contrerasÎncă nu există evaluări
- Cómo Crear Un Formulario Con Google FormsDocument6 paginiCómo Crear Un Formulario Con Google FormsVivian PatiñoÎncă nu există evaluări
- Unidad 3 Lengua Castellana 5° PrimariaDocument4 paginiUnidad 3 Lengua Castellana 5° PrimariacatiperezÎncă nu există evaluări
- ENT7 - Síndrome de WaardenburgDocument8 paginiENT7 - Síndrome de WaardenburgGilberto LlanosÎncă nu există evaluări
- Editado MBM 2010-10-05-MBM y WSS Hombres Y Mujeres de Negocios - Sin FotoDocument10 paginiEditado MBM 2010-10-05-MBM y WSS Hombres Y Mujeres de Negocios - Sin FotoEduardo Estanislau S.Încă nu există evaluări
- Administracion de La IglesiaDocument5 paginiAdministracion de La IglesianicojoelÎncă nu există evaluări
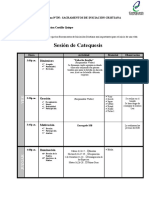
- 14ºSESIÓN - Sacramentos de Iniciacion CristianaDocument2 pagini14ºSESIÓN - Sacramentos de Iniciacion CristianaLuzmi CastilloÎncă nu există evaluări
- Maria Camila Garcia HistorietaDocument3 paginiMaria Camila Garcia Historietamaria garciaÎncă nu există evaluări
- Arguedas El Encuentro de Dos Mundos 1.2Document2 paginiArguedas El Encuentro de Dos Mundos 1.2Dayron MagallanesÎncă nu există evaluări
- Capítulo Ii El Domicilio en El Derecho Internacional PrivadoDocument16 paginiCapítulo Ii El Domicilio en El Derecho Internacional PrivadoFanyPreciadoRomaynaÎncă nu există evaluări
- Método Cartesiano y La HistoriaDocument2 paginiMétodo Cartesiano y La HistoriaOciel AdameÎncă nu există evaluări
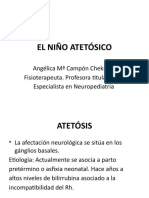
- Atetosis BobathDocument41 paginiAtetosis BobathManuel Vicente Garcia100% (1)
- Proyecto de EcuacionesDocument21 paginiProyecto de EcuacionesjesusÎncă nu există evaluări
- WPI Log 2021.10.15 12.01.22Document4 paginiWPI Log 2021.10.15 12.01.22Carlos BautistaÎncă nu există evaluări
- Análisis de La Aplicación de Estándares en Un Conjunto de REDDocument9 paginiAnálisis de La Aplicación de Estándares en Un Conjunto de REDMiguel Angel Cortes CarmonaÎncă nu există evaluări
- Oraciones en InglésDocument3 paginiOraciones en InglésAnthony Aular100% (1)
- Varios - Travesias Literarias 2Document239 paginiVarios - Travesias Literarias 2OcnosÎncă nu există evaluări
- Enfoque Basado en La GramaticaDocument8 paginiEnfoque Basado en La GramaticaANGIE GUADALUPE MARTINEZ REYESÎncă nu există evaluări
- ModuloDocument35 paginiModuloYelineth ContrerasÎncă nu există evaluări
- Manual Firmware Siesta 3403Document22 paginiManual Firmware Siesta 3403javierportolesÎncă nu există evaluări
- Martín Fierro (Guía de Lectura)Document4 paginiMartín Fierro (Guía de Lectura)Bettina Baima100% (1)
- Trabajo Final Gracia CopaDocument5 paginiTrabajo Final Gracia CopaGracia CRÎncă nu există evaluări
- Como Funcionan Las Aplicaciones WebDocument7 paginiComo Funcionan Las Aplicaciones WebCarolay OsoriaÎncă nu există evaluări
- Ovejero - Cognición Social e Irracionalidad HumanaDocument10 paginiOvejero - Cognición Social e Irracionalidad HumanaJulio Jaime100% (1)