S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- 3d ViewDocument1 pagină3d ViewAbhishek AroraÎncă nu există evaluări
- Quick Introduction To Hypermath: D:/Hw110 - 64/Help/Hmath/Hmath - HTM)Document4 paginiQuick Introduction To Hypermath: D:/Hw110 - 64/Help/Hmath/Hmath - HTM)Abhishek AroraÎncă nu există evaluări
- Wortsman 1986Document5 paginiWortsman 1986Abhishek AroraÎncă nu există evaluări
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument26 paginiEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraÎncă nu există evaluări
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument34 paginiEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraÎncă nu există evaluări
- Lec 37Document51 paginiLec 37Abhishek AroraÎncă nu există evaluări
- Lec 36Document38 paginiLec 36Abhishek AroraÎncă nu există evaluări
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument23 paginiEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraÎncă nu există evaluări
- Lec 40Document33 paginiLec 40Abhishek AroraÎncă nu există evaluări
- Lec12 PDFDocument23 paginiLec12 PDFAbhishek AroraÎncă nu există evaluări
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument23 paginiEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraÎncă nu există evaluări
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument27 paginiEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraÎncă nu există evaluări
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument25 paginiEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraÎncă nu există evaluări
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument24 paginiEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraÎncă nu există evaluări
- Video Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Document17 paginiVideo Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Abhishek AroraÎncă nu există evaluări
- Video Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Document15 paginiVideo Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Abhishek AroraÎncă nu există evaluări
- Lec6 PDFDocument17 paginiLec6 PDFAbhishek AroraÎncă nu există evaluări
- Video Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Document13 paginiVideo Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Abhishek AroraÎncă nu există evaluări
- Video Lecture in Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Document18 paginiVideo Lecture in Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Abhishek AroraÎncă nu există evaluări
- Video Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Document14 paginiVideo Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Abhishek AroraÎncă nu există evaluări
- Lec1 PDFDocument24 paginiLec1 PDFAbhishek AroraÎncă nu există evaluări
- EFM-Discussion Session II QuestionsDocument2 paginiEFM-Discussion Session II QuestionsAbhishek AroraÎncă nu există evaluări
- Lec14 PDFDocument21 paginiLec14 PDFAbhishek AroraÎncă nu există evaluări
- Video Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Document15 paginiVideo Lecture On Engineering Fracture Mechanics, Prof. K. Ramesh, IIT Madras 1Abhishek AroraÎncă nu există evaluări
- Lec4 PDFDocument19 paginiLec4 PDFAbhishek AroraÎncă nu există evaluări
- Lec11 PDFDocument25 paginiLec11 PDFAbhishek AroraÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- What Is Complexity Theory?Document2 paginiWhat Is Complexity Theory?K AnneÎncă nu există evaluări
- Example:1: A.Circular Shift: All AllDocument28 paginiExample:1: A.Circular Shift: All AllJarin TasnimÎncă nu există evaluări
- 3 - Vector SpacesDocument143 pagini3 - Vector SpacesnhưÎncă nu există evaluări
- Scheduling With RMADocument8 paginiScheduling With RMAAnusha KannanÎncă nu există evaluări
- MCV4U Homework GuideDocument8 paginiMCV4U Homework GuideChristian KapsalesÎncă nu există evaluări
- Linear Algebra ApplicationsDocument25 paginiLinear Algebra ApplicationsmeastroccsmÎncă nu există evaluări
- Topic 2 MMW Arithmetic SeriesDocument20 paginiTopic 2 MMW Arithmetic SeriesMarlyn CuregÎncă nu există evaluări
- g5 Multiplicative FunctionDocument45 paginig5 Multiplicative FunctionMax PaineÎncă nu există evaluări
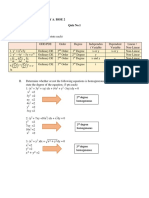
- Ruizo, Charlene Joy A. Bsse 2 Math 121 (Quiz No.1)Document5 paginiRuizo, Charlene Joy A. Bsse 2 Math 121 (Quiz No.1)Charlene Joy RuizoÎncă nu există evaluări
- Average ProblemsDocument2 paginiAverage ProblemsMadhu Mahesh RajÎncă nu există evaluări
- AI Tut Sheet 1Document9 paginiAI Tut Sheet 1Sudesh KansraÎncă nu există evaluări
- Differential Equation Exercise-1 (Objective) : Iit-JeeDocument17 paginiDifferential Equation Exercise-1 (Objective) : Iit-JeeHarsh KumarÎncă nu există evaluări
- Ch-3 RD MathsDocument112 paginiCh-3 RD MathsThe VRAJ GAMESÎncă nu există evaluări
- Differential Equations (MA 1150) : SukumarDocument42 paginiDifferential Equations (MA 1150) : SukumarMansi NanavatiÎncă nu există evaluări
- Os Process Scheduling AlgorithmsDocument4 paginiOs Process Scheduling AlgorithmstossÎncă nu există evaluări
- A Return To The Area Problem - Introduction of Riemann SumsDocument8 paginiA Return To The Area Problem - Introduction of Riemann Sumsezmoreldo100% (1)
- MATH REVIEWER (Edited)Document5 paginiMATH REVIEWER (Edited)Andy SeguisaÎncă nu există evaluări
- Chapter1 ALA-handoutDocument88 paginiChapter1 ALA-handouthong thaoÎncă nu există evaluări
- A Detailed Lesson Plan in Mathematics 8 On RelationsDocument7 paginiA Detailed Lesson Plan in Mathematics 8 On RelationsLyn MacabulitÎncă nu există evaluări
- 18.112-John B. Conway Functions of One Complex Variable II Graduate Texts in Mathematics Pt. 2 1995Document412 pagini18.112-John B. Conway Functions of One Complex Variable II Graduate Texts in Mathematics Pt. 2 1995Sandys NunesÎncă nu există evaluări
- Module 2: Special Products and Binomial Theorem: ObjectivesDocument4 paginiModule 2: Special Products and Binomial Theorem: ObjectivesmoreÎncă nu există evaluări
- Antimirov A.A., Kolyshkin R. - Vaillancourt Complex Variables (1998) EXCELENTEDocument466 paginiAntimirov A.A., Kolyshkin R. - Vaillancourt Complex Variables (1998) EXCELENTEQuenan J. Mendiola R.100% (1)
- 4-A2 Unit 4 PacketMPLG PDFDocument47 pagini4-A2 Unit 4 PacketMPLG PDFthiruvilanÎncă nu există evaluări
- 2.2 Basic Concepts of Math Language - Sets, Functions, and Binary Operations PDFDocument34 pagini2.2 Basic Concepts of Math Language - Sets, Functions, and Binary Operations PDFchris KusanagiÎncă nu există evaluări
- Optimisasi Biaya Transportasi Menggunakan Metode Stepping Stone Dengan Solusi AwalDocument10 paginiOptimisasi Biaya Transportasi Menggunakan Metode Stepping Stone Dengan Solusi AwalDewi Yulia RefiyaniÎncă nu există evaluări
- Dokumen - Tips - Algebra 2 and Trigonometry HonorsDocument43 paginiDokumen - Tips - Algebra 2 and Trigonometry HonorsgaÎncă nu există evaluări
- Digital Signal Processing Lab 5thDocument31 paginiDigital Signal Processing Lab 5thMohsin BhatÎncă nu există evaluări
- Finite Element FormulationDocument38 paginiFinite Element FormulationntrjnÎncă nu există evaluări
- Minimum Diameter Spanning Trees and Related ProblemsDocument21 paginiMinimum Diameter Spanning Trees and Related ProblemsThomas RamosÎncă nu există evaluări
- XI Half Syllabus Test 2 Maths OP GUPTADocument4 paginiXI Half Syllabus Test 2 Maths OP GUPTALavanbarath BÎncă nu există evaluări