S-ar putea să vă placă și
- Res MathDocument106 paginiRes MathimadelghadaouiÎncă nu există evaluări
- Cours - Mathématiques - Résumé - Maths Sup & SpeDocument280 paginiCours - Mathématiques - Résumé - Maths Sup & SpeBtissame Darfaoui100% (6)
- DM Rosetta - CorrigeDocument3 paginiDM Rosetta - CorrigeYoussef MzabiÎncă nu există evaluări
- C00 Masse Et Inertie Des SolidesDocument5 paginiC00 Masse Et Inertie Des SolidesMarc SaletteÎncă nu există evaluări
- MECANIQUE Du Point - MPSI PDFDocument4 paginiMECANIQUE Du Point - MPSI PDFabdousalam tananÎncă nu există evaluări
- M7 Methodes 2008-2009Document1 paginăM7 Methodes 2008-2009KIEMDEÎncă nu există evaluări
- 2022-2023 TD0 Thermique LET2S3 LEEP2S3 LMI2S3 ENSPDocument2 pagini2022-2023 TD0 Thermique LET2S3 LEEP2S3 LMI2S3 ENSPDoré NgohÎncă nu există evaluări
- (Ame) (FO) Formulaire Actions MecaniquesDocument2 pagini(Ame) (FO) Formulaire Actions MecaniquesPatrice SEDILLEÎncă nu există evaluări
- TD Mathématiques Des Modèles DynamiquesDocument18 paginiTD Mathématiques Des Modèles Dynamiquesisabelle100% (1)
- Équations Aux Dérivées PartiellesDocument2 paginiÉquations Aux Dérivées PartiellespaulÎncă nu există evaluări
- 4 Msure Et IntégrationDocument7 pagini4 Msure Et Intégrationcharles EvannÎncă nu există evaluări
- Résumé Formulaire DynamiqueDocument2 paginiRésumé Formulaire DynamiqueZaineb AbbadÎncă nu există evaluări
- Corrigé CNC Physique 2 MP 2022Document10 paginiCorrigé CNC Physique 2 MP 2022aymane85100% (1)
- 2019-2020 - UE2 Electromagnétisme 1 - Examen (Réponses)Document3 pagini2019-2020 - UE2 Electromagnétisme 1 - Examen (Réponses)Amstrong 234Încă nu există evaluări
- Cours Cinetique PDFDocument12 paginiCours Cinetique PDFSara MaroucheÎncă nu există evaluări
- Corr - DM Nc2b01 de Mecc81canique de SolideDocument2 paginiCorr - DM Nc2b01 de Mecc81canique de SolideecomechÎncă nu există evaluări
- ph1 09.dviDocument3 paginiph1 09.dviEl BenÎncă nu există evaluări
- Guyon-Massonnet Chapitre 18-19Document12 paginiGuyon-Massonnet Chapitre 18-19Nassim ChaabiÎncă nu există evaluări
- 2020 - Chp4-Cinétique Du SolideDocument6 pagini2020 - Chp4-Cinétique Du SolideFatiha HouyameÎncă nu există evaluări
- TD25 CorrectionDocument3 paginiTD25 CorrectionSami BennourÎncă nu există evaluări
- Chapitre 6Document3 paginiChapitre 6abdeslamÎncă nu există evaluări
- 2012B Corrige PDFDocument28 pagini2012B Corrige PDFالغزيزال الحسن EL GHZIZAL HassaneÎncă nu există evaluări
- TD ThermodynamiqueDocument35 paginiTD Thermodynamiquefederico riveraÎncă nu există evaluări
- Resume Cours LimitesDocument1 paginăResume Cours Limitesisabfortin24Încă nu există evaluări
- TD 10 - Énergétique - CorrigéDocument4 paginiTD 10 - Énergétique - Corrigéjawahermohamed.maÎncă nu există evaluări
- Analyse Exams Nat Nor 2003 2018Document40 paginiAnalyse Exams Nat Nor 2003 2018Issam JendiÎncă nu există evaluări
- Chapitre 3Document10 paginiChapitre 3stop وقفÎncă nu există evaluări
- Chap09 Primitives POLYDocument4 paginiChap09 Primitives POLYCAKPOÎncă nu există evaluări
- Ccs MP phch12017Document12 paginiCcs MP phch12017FATIMA HADDANIÎncă nu există evaluări
- 5 Mesure Et IntégrationDocument5 pagini5 Mesure Et Intégrationcharles EvannÎncă nu există evaluări
- Groupes MonogénesDocument2 paginiGroupes MonogénesSouleymane Jules SaneÎncă nu există evaluări
- 3 - Lois de CoulombDocument3 pagini3 - Lois de CoulombartustÎncă nu există evaluări
- Formules FrenetDocument2 paginiFormules FrenetLē JøkērÎncă nu există evaluări
- Formules FrenetDocument2 paginiFormules Frenetlapuzine04Încă nu există evaluări
- Formules FrenetDocument2 paginiFormules FrenetÀm IR Amiro'sÎncă nu există evaluări
- Calcul D'un Déterminant D'ordre N - MathprepaDocument1 paginăCalcul D'un Déterminant D'ordre N - Mathprepazakaria amirÎncă nu există evaluări
- 2018-2019 - UE2 Electromagnetisme 2 - DS2 ReponsesDocument3 pagini2018-2019 - UE2 Electromagnetisme 2 - DS2 Reponsesmael.lemouroux2002Încă nu există evaluări
- LaTeX - S PresentationDocument101 paginiLaTeX - S Presentationfidbaha63Încă nu există evaluări
- Poly Me1 Systeme Coordonnees ResuméDocument1 paginăPoly Me1 Systeme Coordonnees ResuméËs'keñSiimöÎncă nu există evaluări
- DS2 Mecanique 20 21Document2 paginiDS2 Mecanique 20 21Hasnae MoulimÎncă nu există evaluări
- Exercices Variables Aléatoires Continues (1) .PDF Version 1Document5 paginiExercices Variables Aléatoires Continues (1) .PDF Version 1Ingénierie AutomobileÎncă nu există evaluări
- ch9 Transfos PlanDocument5 paginich9 Transfos Planvlsenghor97Încă nu există evaluări
- Corrigé Tsi CNC 2019Document9 paginiCorrigé Tsi CNC 2019Ali BraikiÎncă nu există evaluări
- Elements InertieDocument3 paginiElements InertieAmmar BahijÎncă nu există evaluări
- 6 Mesure de Probabilités (Mais Pas Seulement)Document6 pagini6 Mesure de Probabilités (Mais Pas Seulement)charles EvannÎncă nu există evaluări
- CorrectionTDPhyM2 DynamiqueDocument10 paginiCorrectionTDPhyM2 DynamiqueLucasÎncă nu există evaluări
- M5 Moment Cin Etique D'un Point Mat ErielDocument5 paginiM5 Moment Cin Etique D'un Point Mat ErielpalestriÎncă nu există evaluări
- UETC2 Besnard Cours1d Master ComplémentCavitéDocument23 paginiUETC2 Besnard Cours1d Master ComplémentCavitéJefersonÎncă nu există evaluări
- Ef Corrige Maths1 ST 2017 2018 PDFDocument4 paginiEf Corrige Maths1 ST 2017 2018 PDFRai newÎncă nu există evaluări
- 2019-2020 - UE2 Electromagnétisme 2 - DS2 (Réponses)Document3 pagini2019-2020 - UE2 Electromagnétisme 2 - DS2 (Réponses)mael.lemouroux2002Încă nu există evaluări
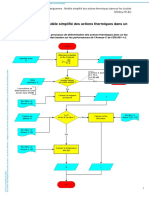
- Organigramme Modèle Simplifié Des Actions Thermiques Dans Un Feu LocaliséDocument2 paginiOrganigramme Modèle Simplifié Des Actions Thermiques Dans Un Feu LocalisébrotherÎncă nu există evaluări
- Mathématiques Pour Lingénieur - Rappels de Cours, Méthodes, Exercices Et Problèmes Avec Corrigés Détaillés (PDFDrive) - 136-137Document1 paginăMathématiques Pour Lingénieur - Rappels de Cours, Méthodes, Exercices Et Problèmes Avec Corrigés Détaillés (PDFDrive) - 136-137AymanÎncă nu există evaluări
- Annale 2020 ArchiDocument5 paginiAnnale 2020 ArchibilalbbkÎncă nu există evaluări
- Manuel de Cours PHY106 - Chap 5 Moment CinétiqueDocument14 paginiManuel de Cours PHY106 - Chap 5 Moment CinétiqueAdote AkueÎncă nu există evaluări
- Notes Cours Chap 2 Cinématique Du Solide ENSA-BM 20-21Document8 paginiNotes Cours Chap 2 Cinématique Du Solide ENSA-BM 20-21youssefbenguenny4Încă nu există evaluări
- Chapitre 5Document6 paginiChapitre 5abdeslamÎncă nu există evaluări
- SupABEF - TD7 - Théorème D'ampèreDocument2 paginiSupABEF - TD7 - Théorème D'ampèremael.lemouroux2002Încă nu există evaluări
- S42 Moment Statique Et Centre de Gravité TAHDocument7 paginiS42 Moment Statique Et Centre de Gravité TAHIsaak houmadiÎncă nu există evaluări
- Cours Cartes ConceptuellesDocument32 paginiCours Cartes ConceptuellesSakinaÎncă nu există evaluări
- Biographie Leonard de Vinci Lhomme Qui Voulait Tout SavoirDocument2 paginiBiographie Leonard de Vinci Lhomme Qui Voulait Tout SavoirartustÎncă nu există evaluări
- 01.exercices - Pratiques CalculatoiresDocument4 pagini01.exercices - Pratiques CalculatoiresartustÎncă nu există evaluări
- 3 - Lois de CoulombDocument3 pagini3 - Lois de CoulombartustÎncă nu există evaluări
- Une Introduction À ScilabDocument118 paginiUne Introduction À ScilabartustÎncă nu există evaluări
- Comment Convaincre Et Etre Persuasif Avec Les MotsDocument237 paginiComment Convaincre Et Etre Persuasif Avec Les MotsGhizlane Julio100% (3)
- Elaborer Son Propre Mind MapDocument4 paginiElaborer Son Propre Mind MapartustÎncă nu există evaluări
- A4 ElectrothermieDocument10 paginiA4 ElectrothermieartustÎncă nu există evaluări
- Competences Professionnelles GlobalesDocument8 paginiCompetences Professionnelles GlobalesartustÎncă nu există evaluări
- Gagner Un Jour Par Semaine Avec Le Mind MappingDocument12 paginiGagner Un Jour Par Semaine Avec Le Mind MappingartustÎncă nu există evaluări
- Comment Évaluer Les Nouvelles Idées - Avec La Méthode DisneyDocument3 paginiComment Évaluer Les Nouvelles Idées - Avec La Méthode DisneyartustÎncă nu există evaluări
- Eolienne VerticaleDocument12 paginiEolienne VerticaleartustÎncă nu există evaluări
- Au Dela Des ApparencesDocument178 paginiAu Dela Des ApparencesSoumaya Tekaya100% (1)
- 51 Secrets Pour Ouvrir Son BusinessDocument17 pagini51 Secrets Pour Ouvrir Son Businessubu75Încă nu există evaluări
- Carte ConceptuelleDocument13 paginiCarte Conceptuelleartust100% (1)
- Monte UrDocument2 paginiMonte UrartustÎncă nu există evaluări
- Traiter Information Grace Au MindmappingDocument6 paginiTraiter Information Grace Au MindmappingartustÎncă nu există evaluări
- Le TransformateurDocument0 paginiLe TransformateurartustÎncă nu există evaluări
- Dessine Moi LintelligenceDocument15 paginiDessine Moi LintelligenceartustÎncă nu există evaluări
- MRP PDP Pic PDFDocument39 paginiMRP PDP Pic PDFNoureddine AoudaÎncă nu există evaluări
- Heuchel ThermoplastiqueDocument1 paginăHeuchel ThermoplastiqueartustÎncă nu există evaluări
- Guide de Conduite de Petits ProjetsDocument10 paginiGuide de Conduite de Petits ProjetsartustÎncă nu există evaluări
- Le TriphaseDocument4 paginiLe Triphaseben boubakerÎncă nu există evaluări
- Thermo SiphonDocument2 paginiThermo SiphonartustÎncă nu există evaluări
- ChaptransfoDocument42 paginiChaptransfoRebai SouleymanÎncă nu există evaluări
- Contacteur Jour Nuit 20a 230vDocument1 paginăContacteur Jour Nuit 20a 230vartustÎncă nu există evaluări
- 0 Cours Conseil CablageDocument3 pagini0 Cours Conseil CablageartustÎncă nu există evaluări
- 0resume NFC15100Document1 pagină0resume NFC15100artustÎncă nu există evaluări
- L'alimentation Des Circuits D'éclairageDocument27 paginiL'alimentation Des Circuits D'éclairagecrasyfrog100% (1)
- Cotation Tolérancée Et AjustementsDocument8 paginiCotation Tolérancée Et AjustementsBen Aissa ChokriÎncă nu există evaluări
- Rapport Des Travaux Pratiques G1 enDocument37 paginiRapport Des Travaux Pratiques G1 enYoro Boubou SIDIBEÎncă nu există evaluări
- 2 - Pieces Mecaniques ElementairesDocument14 pagini2 - Pieces Mecaniques ElementairesYoucef MimouniÎncă nu există evaluări
- Programme de Physique en MPSIDocument19 paginiProgramme de Physique en MPSIDijkschneierÎncă nu există evaluări
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDocument4 paginiTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
- CINÉMATIQUE Du Solide 2022 - 2023Document20 paginiCINÉMATIQUE Du Solide 2022 - 2023Chhin HoutÎncă nu există evaluări
- Chapitre 3 CinématiqueDocument41 paginiChapitre 3 CinématiqueNowe AhmadeÎncă nu există evaluări
- TD2 Partie2 TapisDocument3 paginiTD2 Partie2 TapisSA IDÎncă nu există evaluări
- Examen Mcanique Gnrale 1GM Iset Nabeul 2010 PDFDocument4 paginiExamen Mcanique Gnrale 1GM Iset Nabeul 2010 PDFAbdallah JaoiadiÎncă nu există evaluări
- Devoir N°1 Tle DDocument3 paginiDevoir N°1 Tle Dkoziserge13Încă nu există evaluări
- MouvementDocument8 paginiMouvementAbd'salam LazÎncă nu există evaluări
- Cinemat Plane Exposé01Document50 paginiCinemat Plane Exposé01Achraf El aouameÎncă nu există evaluări
- Efforts Engrenages ConiquesDocument2 paginiEfforts Engrenages ConiquesMB OÎncă nu există evaluări
- Variateur-Courroie STEDocument9 paginiVariateur-Courroie STEMansour NdiayeÎncă nu există evaluări
- Meca Solide Projection Chapitre2Document49 paginiMeca Solide Projection Chapitre2Elio RiachiÎncă nu există evaluări
- Guidage en TranslationDocument6 paginiGuidage en TranslationKamel Bousnina0% (1)
- Mecanique Des Solides - CoursDocument23 paginiMecanique Des Solides - CoursDABAKH LDEEBOYÎncă nu există evaluări
- 2 CinématiqueDocument35 pagini2 Cinématiquebig bossÎncă nu există evaluări
- Exercices Moments Forces Verticales1 DjalalDocument9 paginiExercices Moments Forces Verticales1 DjalalmimofaresÎncă nu există evaluări
- GM3 EngrenagesDocument94 paginiGM3 Engrenagesghourabisarra8Încă nu există evaluări
- Exo 06 07 Corrige Chaines OuvertesDocument4 paginiExo 06 07 Corrige Chaines OuvertesAyoubÎncă nu există evaluări
- TP46 Micromoteur GPSDocument8 paginiTP46 Micromoteur GPSVinicius SalomaoÎncă nu există evaluări
- Torseur Action MecaniqueDocument8 paginiTorseur Action MecaniqueMaha Karray100% (1)
- Chap 2Document22 paginiChap 2abouloifaÎncă nu există evaluări
- Physique Résumé Du Cours en Fiches MPSI-MPDocument176 paginiPhysique Résumé Du Cours en Fiches MPSI-MPyassino89100% (22)
- Boite DSG 02EDocument64 paginiBoite DSG 02ENoureddine Hamla100% (2)
- Mini Projet de RéducteurDocument14 paginiMini Projet de RéducteurWissem OthmaniÎncă nu există evaluări
- 1er Devoir Du 1er Semestre PCT 1ère D 2022-2023 Ceg GoukaDocument4 pagini1er Devoir Du 1er Semestre PCT 1ère D 2022-2023 Ceg GoukaAdeline KwadzoÎncă nu există evaluări
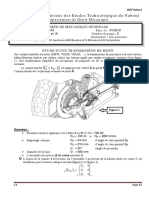
- Systeme de Transmission L3Document3 paginiSysteme de Transmission L3douariÎncă nu există evaluări
- Devoir de Synth N2 1ère A 2022Document18 paginiDevoir de Synth N2 1ère A 2022Khaled HamdaniÎncă nu există evaluări