S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Structural Analysis of Gas Turbine BladeDocument4 paginiStructural Analysis of Gas Turbine BladeAnonymous kw8Yrp0R5rÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Direct Photometry Non Invasive Bilirubin DeviceDocument4 paginiDirect Photometry Non Invasive Bilirubin DeviceAnonymous kw8Yrp0R5rÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Color Image Encryption and Decryption by Using Chaotic Baker Map Bit InterleaverDocument4 paginiColor Image Encryption and Decryption by Using Chaotic Baker Map Bit InterleaverAnonymous kw8Yrp0R5rÎncă nu există evaluări
- Traffic Signal Duration Control by Estimating Vehicle DensityDocument6 paginiTraffic Signal Duration Control by Estimating Vehicle DensityAnonymous kw8Yrp0R5rÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
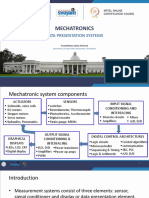
- 15 - Data Presentation System - NewDocument35 pagini15 - Data Presentation System - NewKARTHIK S SÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- ProSys Installer ManualDocument192 paginiProSys Installer ManualPopi Valyraki100% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Sony hcd-gx355, gx555, rg270, rg475, rg575 Ver1.4 SMDocument126 paginiSony hcd-gx355, gx555, rg270, rg475, rg575 Ver1.4 SM00darkÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Prog New VHDLDocument7 paginiProg New VHDLRjeevÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- MT Level III Exam Bank AnswersDocument71 paginiMT Level III Exam Bank AnswersEngr Agha Kabir100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Digital Multifunction Instrument: ApplicationDocument7 paginiDigital Multifunction Instrument: ApplicationNihar RoyÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- WEG Regulador Automatico de Tensao Grta 2d MGML07 00141 Manual Portugues Ingles EspanholDocument51 paginiWEG Regulador Automatico de Tensao Grta 2d MGML07 00141 Manual Portugues Ingles EspanholEDWIN RODOLFO KUKA YUMANÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Session 1: Conceptualization of Smart Urban Energy SystemsDocument12 paginiSession 1: Conceptualization of Smart Urban Energy SystemsRamakrishna SagarÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Project Report (Amie)Document28 paginiProject Report (Amie)Anonymous qID2bA60% (5)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Electromagnetic Fields (ELTE 207) : Faculty of EngineeringDocument12 paginiElectromagnetic Fields (ELTE 207) : Faculty of EngineeringRyiadh Al-AreibiÎncă nu există evaluări
- Assignment 2 ReportDocument9 paginiAssignment 2 ReportHammad ImranÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Fiat RNS3 Users ManualDocument8 paginiFiat RNS3 Users ManualMilan ProticÎncă nu există evaluări
- RRU5301 Technical Specifications: Supported Modes and Frequency BandsDocument7 paginiRRU5301 Technical Specifications: Supported Modes and Frequency BandsMARCSTARSÎncă nu există evaluări
- Toolbox Talk-Electrical SafetyDocument1 paginăToolbox Talk-Electrical SafetyvictorÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Electrostatic Painting From GracoDocument4 paginiElectrostatic Painting From Gracoewing91Încă nu există evaluări
- Operator's Manual: Slit Lamp Microscope HS-5000 5XDocument46 paginiOperator's Manual: Slit Lamp Microscope HS-5000 5XAli TayyabÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Simplex TrueAlert Non-Addressable Free-Run Horn StrobesDocument4 paginiSimplex TrueAlert Non-Addressable Free-Run Horn StrobesSpencer MaloufÎncă nu există evaluări
- Building 7Document1 paginăBuilding 7Arshad AlamÎncă nu există evaluări
- ElenDocument43 paginiElentarawutÎncă nu există evaluări
- Lec.02 - Medium Voltage SwitchgearDocument22 paginiLec.02 - Medium Voltage SwitchgearAchafi Moussa MahamatÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- K Factor TransformersDocument6 paginiK Factor TransformersFábio BauerÎncă nu există evaluări
- PLC - Modicon m221 - Tm221ce16tDocument18 paginiPLC - Modicon m221 - Tm221ce16tBabeh BabehÎncă nu există evaluări
- Railway Axle Power GenerationDocument6 paginiRailway Axle Power GenerationPooja BanÎncă nu există evaluări
- Measurement Techniques in The E-Meter LibraryDocument7 paginiMeasurement Techniques in The E-Meter LibraryNehaoua FaresÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Cat Electronic Technician 2020B v1.0 Product Status ReportDocument34 paginiCat Electronic Technician 2020B v1.0 Product Status ReportFrancisco LópezÎncă nu există evaluări
- Impedance Matching - Wikipedia, The Free EncyclopediaDocument15 paginiImpedance Matching - Wikipedia, The Free EncyclopediaAmitViÎncă nu există evaluări
- Automatic Solar Tracking System: Major Project ReportDocument39 paginiAutomatic Solar Tracking System: Major Project ReportnareshÎncă nu există evaluări
- NARADA 12v 100ah GElDocument2 paginiNARADA 12v 100ah GElFelipe Flores Carrasco100% (2)
- Mid187 Ppid1182 Se5203Document2 paginiMid187 Ppid1182 Se5203AwanÎncă nu există evaluări
- Electrostatic GeneratorDocument56 paginiElectrostatic GeneratorPraveen KumarÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)