S-ar putea să vă placă și
- Análisis de Estabilidad Transitoria en un Sistema EléctricoDocument7 paginiAnálisis de Estabilidad Transitoria en un Sistema Eléctricocamilo_solÎncă nu există evaluări
- Regulación Automática de TensiónDocument5 paginiRegulación Automática de TensiónBlass LehmannÎncă nu există evaluări
- Estabilidad CLASE 2Document33 paginiEstabilidad CLASE 2David Gallegos100% (2)
- AgsDocument21 paginiAgsw3stÎncă nu există evaluări
- Mant U3Document19 paginiMant U3Luis TapiaÎncă nu există evaluări
- Despacho EconomicoDocument29 paginiDespacho EconomicoCarlosÎncă nu există evaluări
- Calculo de Corriente de Falla y Protecciones ElectricasDocument45 paginiCalculo de Corriente de Falla y Protecciones ElectricasAngelo Jesus100% (1)
- Armonicos PDFDocument17 paginiArmonicos PDFsamuelÎncă nu există evaluări
- Control Automático de La GeneraciónDocument3 paginiControl Automático de La GeneraciónasdÎncă nu există evaluări
- Circuitos Eléctricos I. Tema 2.2Document41 paginiCircuitos Eléctricos I. Tema 2.2FortinoÎncă nu există evaluări
- PORTAFOLIO U2 P y M EDocument34 paginiPORTAFOLIO U2 P y M EWilbert J. TorresÎncă nu există evaluări
- Ley Ohm, corriente y potencia eléctricaDocument15 paginiLey Ohm, corriente y potencia eléctricaJohnny MesinaÎncă nu există evaluări
- Curso de Costos en La Construccion Tema 1 IntroduccionDocument7 paginiCurso de Costos en La Construccion Tema 1 IntroducciongreenstopaÎncă nu există evaluări
- Filtros ActivosDocument8 paginiFiltros ActivosJhon Edward Blas AgüeroÎncă nu există evaluări
- Unidad 1 Intalaciones Eléctricas IndustrialesDocument10 paginiUnidad 1 Intalaciones Eléctricas IndustrialesJuve Hernandez Rojas0% (1)
- 1generalidades de Los Sistemas de PotenciaDocument92 pagini1generalidades de Los Sistemas de Potenciatamariz colque bustosÎncă nu există evaluări
- Introducción A Circuitos EléctricosDocument5 paginiIntroducción A Circuitos Eléctricosquito95Încă nu există evaluări
- Ciclo RankineDocument15 paginiCiclo RankineYair GarciaÎncă nu există evaluări
- P2 Teoremas de Circuitos EyM CC Oto2021 JSLDocument13 paginiP2 Teoremas de Circuitos EyM CC Oto2021 JSLLuis CeronÎncă nu există evaluări
- 03 Estructura de Las Redes EléctricasDocument14 pagini03 Estructura de Las Redes EléctricasHenry Segundo Ramos ArévaloÎncă nu există evaluări
- Unidad 1 de Centrales ElectricasDocument5 paginiUnidad 1 de Centrales Electricasjesus martinezÎncă nu există evaluări
- Guia 4 Compensación de Reactivos.Document33 paginiGuia 4 Compensación de Reactivos.alexander RodriguezÎncă nu există evaluări
- Capítulo II - Análisis de Sistemas Trifásico BalanceadoDocument29 paginiCapítulo II - Análisis de Sistemas Trifásico Balanceadoariel polancoÎncă nu există evaluări
- Smart Grid LabviewDocument17 paginiSmart Grid LabviewRuperto AduviriÎncă nu există evaluări
- Procesamiento Digital de SeñalesDocument2 paginiProcesamiento Digital de SeñalesAnonymous 5qQ7p62J7Încă nu există evaluări
- Referencia SKM Estudios de Fallas IEC 60909Document5 paginiReferencia SKM Estudios de Fallas IEC 60909angelÎncă nu există evaluări
- Sesión 3 - Parámetros de Redes de 2 Puertas - Parte 1Document59 paginiSesión 3 - Parámetros de Redes de 2 Puertas - Parte 1Cristian Castillo AquevequeÎncă nu există evaluări
- Alumbrado Publico ImprimirDocument17 paginiAlumbrado Publico ImprimirCristianSanguchoÎncă nu există evaluări
- Factor de Demanda en Instalaciones ElectricasDocument192 paginiFactor de Demanda en Instalaciones ElectricasJavier muñozÎncă nu există evaluări
- Alta TensionDocument29 paginiAlta TensionFer VelezÎncă nu există evaluări
- Clase 3 PT 1Document22 paginiClase 3 PT 1Not 8Încă nu există evaluări
- Medicion de Potencia en Circuitos Trifasicos...Document14 paginiMedicion de Potencia en Circuitos Trifasicos...Vannee Pat CetinaÎncă nu există evaluări
- Como Resolver Circuitos Por Mallas y TodoDocument9 paginiComo Resolver Circuitos Por Mallas y TodominimalisbetterÎncă nu există evaluări
- Transformadores de CorrienteDocument1 paginăTransformadores de CorrienteRichard Roger Correa ChungaÎncă nu există evaluări
- Presentación - Circuitos EléctricosDocument98 paginiPresentación - Circuitos EléctricosMiguel Ferreyra CLwÎncă nu există evaluări
- Estudio de CortocircuitoDocument6 paginiEstudio de CortocircuitoCarlos HerasÎncă nu există evaluări
- Técnicas de Compensación y Filtrado de Perturbaciones ArmónicasDocument64 paginiTécnicas de Compensación y Filtrado de Perturbaciones ArmónicasJESUS EMIRO GOMEZ JIMENEZÎncă nu există evaluări
- Unidad I Inst Elect IndustDocument19 paginiUnidad I Inst Elect IndustAldito RamosÎncă nu există evaluări
- Curso Virtual Lineas de Transmisión Semana 04Document35 paginiCurso Virtual Lineas de Transmisión Semana 04Keyber Yober castillo GarcíaÎncă nu există evaluări
- Termogeneracion ElectricaDocument55 paginiTermogeneracion ElectricaRobert WagnerÎncă nu există evaluări
- Sobretensiones Transitorias Gama CSC PDFDocument6 paginiSobretensiones Transitorias Gama CSC PDFAlexRojanoÎncă nu există evaluări
- Solución Quiz Semana 3Document3 paginiSolución Quiz Semana 3Joyner Stiven Caballero AbrilÎncă nu există evaluări
- Legislacion Electrica 1Document10 paginiLegislacion Electrica 1RICARDO ALONSO SORIANO GONZALEZÎncă nu există evaluări
- 3.2.3 U 3 MantenimientoDocument16 pagini3.2.3 U 3 MantenimientoVictoria CocteconÎncă nu există evaluări
- Principios de Protección de LTDocument24 paginiPrincipios de Protección de LTKennyM.RamirezÎncă nu există evaluări
- Tesis Calculo de Cortocircuito de Un Sistema Ieee de 13 Buses Considerando Taps No NominalesDocument49 paginiTesis Calculo de Cortocircuito de Un Sistema Ieee de 13 Buses Considerando Taps No NominalesMarcos SanabriaÎncă nu există evaluări
- Mant U2Document27 paginiMant U2Luis TapiaÎncă nu există evaluări
- IEEE - Transformadores - Unidad 2Document6 paginiIEEE - Transformadores - Unidad 2Alejandro Herrera SanchezÎncă nu există evaluări
- Exposicion Protecciones Generador SincronoDocument23 paginiExposicion Protecciones Generador SincronoCarlos Tau AstorgaÎncă nu există evaluări
- Estudio de Cortocircuito y Coordinación de Protecciones, Parte 1 Ingenieri PDFDocument6 paginiEstudio de Cortocircuito y Coordinación de Protecciones, Parte 1 Ingenieri PDFsupercheleroÎncă nu există evaluări
- DEFINICIONES Y ELEMENTOS DE LAS REDES DE DISTRIBUCIÓNDocument80 paginiDEFINICIONES Y ELEMENTOS DE LAS REDES DE DISTRIBUCIÓNFlores CarolinaÎncă nu există evaluări
- Perturbaciones en Redes EléctricasDocument5 paginiPerturbaciones en Redes EléctricasEdgar Cardeña Cardeña100% (1)
- 4.3 Ciclo Rankine PDFDocument19 pagini4.3 Ciclo Rankine PDFEdgaro omar Juarez cruzÎncă nu există evaluări
- Vapo (1) 2Document81 paginiVapo (1) 2AlejandraÎncă nu există evaluări
- 24Document74 pagini24Pedro Pablo De Gante MoralesÎncă nu există evaluări
- Informe Estabilidad de Sistemas de PotenciaDocument5 paginiInforme Estabilidad de Sistemas de PotenciaBryan VarelaÎncă nu există evaluări
- Estabilidad Transitoria Con DigsilentDocument23 paginiEstabilidad Transitoria Con DigsilentJairo Curo MartínezÎncă nu există evaluări
- Protección de Sistemas Eléctricos de PotenciaDocument41 paginiProtección de Sistemas Eléctricos de Potenciaedgar ruizÎncă nu există evaluări
- Informe Sistema Electrico de PotenciaDocument32 paginiInforme Sistema Electrico de PotenciaLuis Enrique MiranoÎncă nu există evaluări
- MF1161_3 - Electrotécnia para instalaciones térmicasDe la EverandMF1161_3 - Electrotécnia para instalaciones térmicasÎncă nu există evaluări
- PDS06-R01-Rev 02Document2 paginiPDS06-R01-Rev 02Renzo Garcia CanalesÎncă nu există evaluări
- Examen SepDocument3 paginiExamen SepRenzo Garcia CanalesÎncă nu există evaluări
- Bottle Line - InformeDocument10 paginiBottle Line - InformeRenzo Garcia CanalesÎncă nu există evaluări
- Aemc 6472Document68 paginiAemc 6472Mauricio BonillaÎncă nu există evaluări
- PT-PR 161503 Carta de Garantía Rev. 2Document1 paginăPT-PR 161503 Carta de Garantía Rev. 2Renzo Garcia CanalesÎncă nu există evaluări
- CVD - Renzo Vidal Garcia CanalesDocument15 paginiCVD - Renzo Vidal Garcia CanalesRenzo Garcia CanalesÎncă nu există evaluări
- Estrategia de Operaciones y Suministro: Dimensiones Competitivas, Ganadores de Pedidos y Marco EstratégicoDocument19 paginiEstrategia de Operaciones y Suministro: Dimensiones Competitivas, Ganadores de Pedidos y Marco EstratégicoRenzo Garcia CanalesÎncă nu există evaluări
- Personalizar La Educación Con Un Test de InteligenciasDocument4 paginiPersonalizar La Educación Con Un Test de InteligenciasPablo Williams Argueta ChangÎncă nu există evaluări
- BarrancoDocument8 paginiBarrancoRenzo Garcia CanalesÎncă nu există evaluări
- Test de Orientación VocacionalDocument3 paginiTest de Orientación VocacionalEdisson CastilloÎncă nu există evaluări
- Test VocacionalDocument2 paginiTest VocacionalRenzo Garcia CanalesÎncă nu există evaluări
- PT-PR 161503 Lista de Servicios Similares - ABT Rev. 1Document6 paginiPT-PR 161503 Lista de Servicios Similares - ABT Rev. 1Renzo Garcia CanalesÎncă nu există evaluări
- C21 1863 0 2 - Sp.Document3 paginiC21 1863 0 2 - Sp.Renzo Garcia CanalesÎncă nu există evaluări
- Cortador Circular DT Ciclo Tipo Compas - DescripcionDocument2 paginiCortador Circular DT Ciclo Tipo Compas - DescripcionRenzo Garcia CanalesÎncă nu există evaluări
- PT-PR 161503 Informe Estadístico 2015-2021 Rev.0Document6 paginiPT-PR 161503 Informe Estadístico 2015-2021 Rev.0Renzo Garcia CanalesÎncă nu există evaluări
- Consideraciones de NEXA SET 220KVDocument1 paginăConsideraciones de NEXA SET 220KVRenzo Garcia CanalesÎncă nu există evaluări
- Cortador Circular DT Ciclo Tipo Compas - DescripcionDocument2 paginiCortador Circular DT Ciclo Tipo Compas - DescripcionRenzo Garcia CanalesÎncă nu există evaluări
- Trabajo AccionamientoDocument31 paginiTrabajo AccionamientoRenzo Garcia CanalesÎncă nu există evaluări
- Mantenimientos preventivos SET 220KVDocument5 paginiMantenimientos preventivos SET 220KVRenzo Garcia CanalesÎncă nu există evaluări
- Aussie Experience 2021Document11 paginiAussie Experience 2021Renzo Garcia CanalesÎncă nu există evaluări
- Consideraciones de NEXA SET 220KVDocument1 paginăConsideraciones de NEXA SET 220KVRenzo Garcia CanalesÎncă nu există evaluări
- EHV Cable AccessoriesDocument46 paginiEHV Cable AccessoriesSergioÎncă nu există evaluări
- Estado de Set Nexa 220kvDocument3 paginiEstado de Set Nexa 220kvRenzo Garcia CanalesÎncă nu există evaluări
- Estado de Set Nexa 220kvDocument3 paginiEstado de Set Nexa 220kvRenzo Garcia CanalesÎncă nu există evaluări
- Mantenimientos preventivos SET 220KVDocument5 paginiMantenimientos preventivos SET 220KVRenzo Garcia CanalesÎncă nu există evaluări
- Alcance - Servicio - Mantenimiento Patio 220 NEXA CJM 2Document5 paginiAlcance - Servicio - Mantenimiento Patio 220 NEXA CJM 2Renzo Garcia CanalesÎncă nu există evaluări
- Cronograma Mantenimiento Patio 220 NEXA CJM 20.09 - 25.09Document1 paginăCronograma Mantenimiento Patio 220 NEXA CJM 20.09 - 25.09Renzo Garcia CanalesÎncă nu există evaluări
- Cronograma Mantenimiento Patio 220 NEXA CJM 20.09 - 25.09Document1 paginăCronograma Mantenimiento Patio 220 NEXA CJM 20.09 - 25.09Renzo Garcia CanalesÎncă nu există evaluări
- Mantenimientos preventivos SET 220KVDocument5 paginiMantenimientos preventivos SET 220KVRenzo Garcia CanalesÎncă nu există evaluări
- Codigo de Colores PGU-CJM-SSM-SSM-012-ESDocument61 paginiCodigo de Colores PGU-CJM-SSM-SSM-012-ESRenzo Garcia Canales100% (1)
- Manual para La Elaboración Del Proyecto Socio TecnológicoDocument12 paginiManual para La Elaboración Del Proyecto Socio TecnológicoCarlos DpzÎncă nu există evaluări
- Sistemas de Alimentacion Motores Diesel RenaultDocument86 paginiSistemas de Alimentacion Motores Diesel Renaultapi-3806781100% (2)
- Influencia de La Propiedades Del Suelo en El Diseño de CimentacionesDocument27 paginiInfluencia de La Propiedades Del Suelo en El Diseño de CimentacionesMiguel DEspÎncă nu există evaluări
- Guia de Instalacion Tanque CisternaDocument7 paginiGuia de Instalacion Tanque CisternaMiguel Marino Orihuela De la CruzÎncă nu există evaluări
- ONTOLOGIASDocument13 paginiONTOLOGIASAnonymous D2FhscxÎncă nu există evaluări
- Contador Sincrono y AsincronoDocument19 paginiContador Sincrono y AsincronoOzÎncă nu există evaluări
- Tarea 2 Unidad I - Búsqueda de Información.Document11 paginiTarea 2 Unidad I - Búsqueda de Información.Odaly Abad VillalobosÎncă nu există evaluări
- Respuesta en FrecuenciaDocument10 paginiRespuesta en Frecuenciacarlos maldonadoÎncă nu există evaluări
- Guia Actividades EmpresarialesDocument2 paginiGuia Actividades EmpresarialesAlfredo GarciaÎncă nu există evaluări
- Curso GasDocument54 paginiCurso GasOsvaldo Antonio Barrios Acuña100% (2)
- 1 Estrategias para El Estudio y La Comunicacion (Parte 1)Document147 pagini1 Estrategias para El Estudio y La Comunicacion (Parte 1)hectorchavez70Încă nu există evaluări
- Biocombustible A Partir de AlgasDocument48 paginiBiocombustible A Partir de AlgasDiego Alfredo Zavala SolisÎncă nu există evaluări
- El lenguaje humano: comunicación, evolución y desarrolloDocument21 paginiEl lenguaje humano: comunicación, evolución y desarrolloponceroqueÎncă nu există evaluări
- Eulalio Ferrer Publicidad y Comunicacion PDFDocument2 paginiEulalio Ferrer Publicidad y Comunicacion PDFStacy0% (7)
- Apuntes Uni 4 Entorno MacroeconomicoDocument18 paginiApuntes Uni 4 Entorno MacroeconomicoLea Alonzo GarziaÎncă nu există evaluări
- g32 Ppto TotalDocument1 paginăg32 Ppto TotalGabriel IgnacioÎncă nu există evaluări
- Anexo 1 - Anexo Teìcnico MICROACUEDUCTODocument53 paginiAnexo 1 - Anexo Teìcnico MICROACUEDUCTOElkinRafaelTovioÎncă nu există evaluări
- Planificación de Procesos IndustrialesDocument6 paginiPlanificación de Procesos IndustrialesTato FloresÎncă nu există evaluări
- Compilador PICC HitechDocument94 paginiCompilador PICC HitechAndres Raul Bruno SaraviaÎncă nu există evaluări
- Manual operación auto-bomba forestalDocument37 paginiManual operación auto-bomba forestalDaniel Alberto DiazÎncă nu există evaluări
- Anexo Técnico de Factura Electrónica de Venta Validación PreviaV1.8Document538 paginiAnexo Técnico de Factura Electrónica de Venta Validación PreviaV1.8William Hernan Gomez MendezÎncă nu există evaluări
- Calidad de AnestesiologiaDocument12 paginiCalidad de AnestesiologiaJorge Eliecer Gambin ZabaletaÎncă nu există evaluări
- Asfalto - Elvis Quispe CruzDocument3 paginiAsfalto - Elvis Quispe CruzELVIS QUISPE CRUZÎncă nu există evaluări
- C.V. Rosa Baca SabaDocument3 paginiC.V. Rosa Baca SabaRosita Miriam Baca SabaÎncă nu există evaluări
- Nodo Estructural 3D, Lamina 9Document1 paginăNodo Estructural 3D, Lamina 9geneesismachadoÎncă nu există evaluări
- Benchmark CoworkingDocument19 paginiBenchmark CoworkingDaniela Gomez100% (1)
- Mantenimiento y Reparacion de Maquinas Con Sistemas Hidraulicos y NeumaticosDocument267 paginiMantenimiento y Reparacion de Maquinas Con Sistemas Hidraulicos y NeumaticosreyesmaaÎncă nu există evaluări
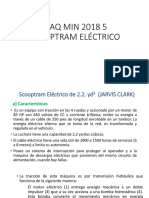
- Scooptram eléctrico 2.2 yd3Document8 paginiScooptram eléctrico 2.2 yd3Pamela Quispe CordovaÎncă nu există evaluări
- Unidad 3. Actividad 1. EntregableDocument2 paginiUnidad 3. Actividad 1. EntregableGilber GomezÎncă nu există evaluări
- Caso 4 Bayfield Mud CompanyDocument2 paginiCaso 4 Bayfield Mud CompanyAngel Chilo PaccaraÎncă nu există evaluări