S-ar putea să vă placă și
- Fan RPM With Internal Hall Effect Sensor and Arduino (Intro To Hardware Interrupt and LCD Display) - 3 Steps (With Pictures)Document8 paginiFan RPM With Internal Hall Effect Sensor and Arduino (Intro To Hardware Interrupt and LCD Display) - 3 Steps (With Pictures)biagginoo ferranteeÎncă nu există evaluări
- A Complete 8-Bit Microcontroller in VHDLDocument29 paginiA Complete 8-Bit Microcontroller in VHDLSidney O. EbotÎncă nu există evaluări
- Heidenhain - Position Encoders For Servo DrivesDocument72 paginiHeidenhain - Position Encoders For Servo DrivesThomas100% (1)
- DMG-iTNC530 MillProgManual (533 190-23) PDFDocument789 paginiDMG-iTNC530 MillProgManual (533 190-23) PDFMACKAY9999Încă nu există evaluări
- Design and Implementation of A Digital TachometerDocument3 paginiDesign and Implementation of A Digital TachometerInnovative Research Publications0% (1)
- Lecture 9 USB To PIC Microcontroller InterfaceDocument8 paginiLecture 9 USB To PIC Microcontroller Interfaceaaaa100% (1)
- The Use of Variables, Macros and Subroutines and Compatibility With FANUC Parametric Programming ......................... 3Document10 paginiThe Use of Variables, Macros and Subroutines and Compatibility With FANUC Parametric Programming ......................... 3Jérôme GRANGEÎncă nu există evaluări
- Tachometer Using ArduinoDocument4 paginiTachometer Using ArduinoJamMnx_Încă nu există evaluări
- Odometry SensorsDocument20 paginiOdometry Sensorssunxing22Încă nu există evaluări
- Digital TachometerDocument12 paginiDigital TachometerHariniÎncă nu există evaluări
- Comparative Study of CNC Controllers Used in CNC Milling MachineDocument9 paginiComparative Study of CNC Controllers Used in CNC Milling MachineAJER JOURNALÎncă nu există evaluări
- Supply Module TVM 2.4: RexrothDocument65 paginiSupply Module TVM 2.4: RexrothZoran ŠiručkaÎncă nu există evaluări
- Digital TachometerDocument61 paginiDigital TachometernavyaÎncă nu există evaluări
- RPMDocument3 paginiRPMLeonard AntelizÎncă nu există evaluări
- Operating Parameter Programming Module Wam 1019 Indramat Manual PDFDocument11 paginiOperating Parameter Programming Module Wam 1019 Indramat Manual PDFremus popescuÎncă nu există evaluări
- Accelerometer Based Hand Gesture Controlled Robot Using ArduinoDocument10 paginiAccelerometer Based Hand Gesture Controlled Robot Using ArduinoRaj AryanÎncă nu există evaluări
- Install: Windows: GRBL 1.1Document31 paginiInstall: Windows: GRBL 1.1Martas DeskÎncă nu există evaluări
- (Logic Analyzer) Design ReportDocument28 pagini(Logic Analyzer) Design ReportDaniel TitirezÎncă nu există evaluări
- NRF24L01 Wireless Keyboard Data Transmission System Based On ArduinoDocument4 paginiNRF24L01 Wireless Keyboard Data Transmission System Based On ArduinoHassan AllawiÎncă nu există evaluări
- Hass AnswersDocument7 paginiHass AnswersRelu ChiruÎncă nu există evaluări
- Arduino LCD ThermostatDocument6 paginiArduino LCD Thermostatmzovkic8Încă nu există evaluări
- Linear Encoders: For Numerically Controlled Machine ToolsDocument56 paginiLinear Encoders: For Numerically Controlled Machine Toolsjohanes kharisma100% (1)
- PIC16F877ADocument8 paginiPIC16F877ASinduja Balaji100% (1)
- M1 Star MarpossDocument64 paginiM1 Star MarpossjoaoluÎncă nu există evaluări
- Hot Wire CNC Foam CutterDocument12 paginiHot Wire CNC Foam CutterrevildaÎncă nu există evaluări
- Smart Home Control Using LabviewDocument26 paginiSmart Home Control Using LabviewSiva BadrinathÎncă nu există evaluări
- CNC Common Terms PDFDocument2 paginiCNC Common Terms PDFShaival JhaÎncă nu există evaluări
- Heidenhain EncoderDocument2 paginiHeidenhain EncoderCristian AlonsoÎncă nu există evaluări
- ESP32 DevKit ESP32-WROOM GPIO PinoutDocument7 paginiESP32 DevKit ESP32-WROOM GPIO PinoutOm VermaÎncă nu există evaluări
- CNC by SourabhDocument7 paginiCNC by SourabhsaurabhÎncă nu există evaluări
- Circuit TodayDocument30 paginiCircuit TodayBrian GiriÎncă nu există evaluări
- Gorenje Tiki TGRDocument32 paginiGorenje Tiki TGRmiroslavÎncă nu există evaluări
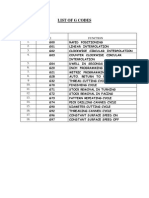
- List of G Codes: SR - NO. Code Function 1. 2. 3. 4Document28 paginiList of G Codes: SR - NO. Code Function 1. 2. 3. 4pmagrawal100% (1)
- STM32 RS-485Document12 paginiSTM32 RS-485mail87523Încă nu există evaluări
- EnDat 2.2Document20 paginiEnDat 2.2Tushar Kanti BiswasÎncă nu există evaluări
- Robotics Course StructureDocument4 paginiRobotics Course StructurerohitÎncă nu există evaluări
- Product User's Manual - HC SR04 Ultrasonic SensorDocument10 paginiProduct User's Manual - HC SR04 Ultrasonic SensorAlejandro Trujillo GómezÎncă nu există evaluări
- Introduction To Programming The PIC32Document17 paginiIntroduction To Programming The PIC32Kim Breet100% (3)
- EMBEDDED BASED Automatic AUDITORIUM CONTROLLER 0TH REVDocument36 paginiEMBEDDED BASED Automatic AUDITORIUM CONTROLLER 0TH REVspringsource100% (1)
- Bitwise OperatorsDocument4 paginiBitwise OperatorsslspaÎncă nu există evaluări
- EncoderDocument6 paginiEncodervanjalujic100% (1)
- mf70 PKGDocument19 paginimf70 PKGCarlos RamirezÎncă nu există evaluări
- My ProjectDocument21 paginiMy ProjectSam SachanÎncă nu există evaluări
- VOICE AND BLUETOOTH CONTROLLED ROBOT - Amit KumarDocument14 paginiVOICE AND BLUETOOTH CONTROLLED ROBOT - Amit Kumarpal sarvesh100% (1)
- Gyro Camera For Motorcycle Using ArduinoDocument8 paginiGyro Camera For Motorcycle Using ArduinoCUIDAITOÎncă nu există evaluări
- Surveillance Robotic CarDocument10 paginiSurveillance Robotic CarSlakshmi NarayanaÎncă nu există evaluări
- iTNC 530: User's Manual Heidenhain Conversational ProgrammingDocument729 paginiiTNC 530: User's Manual Heidenhain Conversational ProgrammingCarlos Aguilar MontemayorÎncă nu există evaluări
- Test Conditions For Machining Centres - Part 11: Noise TestsDocument13 paginiTest Conditions For Machining Centres - Part 11: Noise TestsbrunoagandraÎncă nu există evaluări
- Tiva C Series LaunchPadDocument152 paginiTiva C Series LaunchPadhuyvt01Încă nu există evaluări
- Ultrasonic Sensor SpecificationsDocument3 paginiUltrasonic Sensor SpecificationsJohn Mark CarpioÎncă nu există evaluări
- Robotics MotionDocument29 paginiRobotics MotionfenixnomahotmailcomÎncă nu există evaluări
- Automatic Poor QualityDocument5 paginiAutomatic Poor Qualityqwerty187190Încă nu există evaluări
- STM32F070CB STM32F070RB STM32F070C6 STM32F070F6Document83 paginiSTM32F070CB STM32F070RB STM32F070C6 STM32F070F6MutiaÎncă nu există evaluări
- Encoders&DecodersDocument14 paginiEncoders&DecodersAlex BongÎncă nu există evaluări
- Hand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarDocument7 paginiHand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarIJRASETPublicationsÎncă nu există evaluări
- "Keypad and LCD Interfacing Using MicrocontrollerDocument23 pagini"Keypad and LCD Interfacing Using MicrocontrollerKamal PatidarÎncă nu există evaluări
- Interfacing Numeric Keypad With MB90F387SDocument18 paginiInterfacing Numeric Keypad With MB90F387SMark VillamorÎncă nu există evaluări
- Biomedical Sensors Data Acquisition with LabVIEW: Effective Way to Integrate Arduino with LabViewDe la EverandBiomedical Sensors Data Acquisition with LabVIEW: Effective Way to Integrate Arduino with LabViewÎncă nu există evaluări
- Danaher Encoder HandbookDocument16 paginiDanaher Encoder HandbookatifkhushnoodÎncă nu există evaluări
- Furniture TextureDocument1 paginăFurniture TexturepanchalabÎncă nu există evaluări
- Line Reactors Can Protect Motors and Reduce Power Line Distortion From VfdsDocument2 paginiLine Reactors Can Protect Motors and Reduce Power Line Distortion From VfdspanchalabÎncă nu există evaluări
- Induction Motor NameplateDocument5 paginiInduction Motor NameplatepanchalabÎncă nu există evaluări
- Environmental Protection LevelsDocument2 paginiEnvironmental Protection LevelspanchalabÎncă nu există evaluări
- Mobil Pyrotec™ HFD 46Document2 paginiMobil Pyrotec™ HFD 46ABDUL REHMAN PIPRANIÎncă nu există evaluări
- Eminence Deltalite II 2515Document1 paginăEminence Deltalite II 2515Suto BandÎncă nu există evaluări
- Ch2 Snapshot 20 LightingDocument4 paginiCh2 Snapshot 20 Lightinggarych72Încă nu există evaluări
- GE Proficy Machine Edition Getting StartedDocument124 paginiGE Proficy Machine Edition Getting StartedIrfan AshrafÎncă nu există evaluări
- 27U RackDocument6 pagini27U Racknitin lagejuÎncă nu există evaluări
- Kalkhoff Users ManualDocument148 paginiKalkhoff Users Manualanonms_accÎncă nu există evaluări
- D8 9M-2012PVDocument16 paginiD8 9M-2012PVvishesh dharaiya0% (4)
- Mohammed JaberDocument768 paginiMohammed JaberMohammed Omar JaberÎncă nu există evaluări
- Haas Axis Lubrication Oil - Conversion - AD0629Document12 paginiHaas Axis Lubrication Oil - Conversion - AD0629Jhonny PérezÎncă nu există evaluări
- PC Platform Compilers For PSS®E - Smart Grid Solutions - SiemensDocument2 paginiPC Platform Compilers For PSS®E - Smart Grid Solutions - SiemensSarah JenkinsÎncă nu există evaluări
- 2014 Case Digest GMA Network v. COMELECDocument7 pagini2014 Case Digest GMA Network v. COMELECMarie Charlotte OlondrizÎncă nu există evaluări
- HVAC Water TreatmentDocument7 paginiHVAC Water TreatmentDuxToyÎncă nu există evaluări
- DC Voltage & Current Digital Panel Meter, Model 451A: Quick ManualDocument23 paginiDC Voltage & Current Digital Panel Meter, Model 451A: Quick ManualdedekeetÎncă nu există evaluări
- Dodge Journey 2017 - Owner's ManualDocument510 paginiDodge Journey 2017 - Owner's Manualandres camachin100% (1)
- Eco ProductsDocument3 paginiEco Productssreekutty A SÎncă nu există evaluări
- Quality Related QuestionsDocument22 paginiQuality Related QuestionsHotPriyu OnlyforgalsÎncă nu există evaluări
- Lab Manual No 13Document3 paginiLab Manual No 13Hammad JawadÎncă nu există evaluări
- BK Report and ProjectDocument55 paginiBK Report and ProjecttesfuÎncă nu există evaluări
- Confined Spaces: Avoiding Common Mistakes in Gas DetectionDocument1 paginăConfined Spaces: Avoiding Common Mistakes in Gas Detectiontrravi1983Încă nu există evaluări
- CAM Charges Working For The Month of May 2023Document1 paginăCAM Charges Working For The Month of May 2023adnandani2882Încă nu există evaluări
- Tutorial Joint Push Pull - English - V1.1 - 20 Feb 08Document31 paginiTutorial Joint Push Pull - English - V1.1 - 20 Feb 08shadownrunÎncă nu există evaluări
- Etap - Relay CoordinationDocument311 paginiEtap - Relay CoordinationManohar Potnuru100% (1)
- Data Sheet: PNP Medium Power TransistorDocument9 paginiData Sheet: PNP Medium Power TransistorMiloud ChouguiÎncă nu există evaluări
- 4a Bulk Water Meter Installation in Chamber DrawingPEWSTDAMI004 PDFDocument1 pagină4a Bulk Water Meter Installation in Chamber DrawingPEWSTDAMI004 PDFRonald ValenciaÎncă nu există evaluări
- Shear Stress Though Tapered Pipe Thread - Eng-TipsDocument4 paginiShear Stress Though Tapered Pipe Thread - Eng-TipsrodrigoperezsimoneÎncă nu există evaluări
- Pds Luxathane 5000 VocDocument2 paginiPds Luxathane 5000 Vocmuthukumar100% (1)
- 2012-13 Waste CalendarDocument2 pagini2012-13 Waste CalendarOmar9998Încă nu există evaluări
- Ductle Iron Spec1Document8 paginiDuctle Iron Spec1윤병택Încă nu există evaluări
- Drive List BoxDocument3 paginiDrive List BoxLuis Carlos VillegasÎncă nu există evaluări