S-ar putea să vă placă și
- Flow Measurement: By Square-Edged Orifice Plate Using Corner TappingsDe la EverandFlow Measurement: By Square-Edged Orifice Plate Using Corner TappingsEvaluare: 5 din 5 stele5/5 (1)
- 2016 Cau Caesar II CoolingDocument21 pagini2016 Cau Caesar II CoolingGentelmanOnlyÎncă nu există evaluări
- Marine Electrical Practice: Marine Engineering SeriesDe la EverandMarine Electrical Practice: Marine Engineering SeriesEvaluare: 4 din 5 stele4/5 (8)
- Calculated Stress in CAESAR II Software by Using Failure TheoryDocument6 paginiCalculated Stress in CAESAR II Software by Using Failure TheoryHùng Mạnh Nguyễn100% (1)
- Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality ApproachDe la EverandFuzzy Control Systems Design and Analysis: A Linear Matrix Inequality ApproachÎncă nu există evaluări
- Caesar II-caux 2018 - Importance of b31j & Bos31Document31 paginiCaesar II-caux 2018 - Importance of b31j & Bos31zahoorÎncă nu există evaluări
- Stressman Engineering - Study - Stresses in Pipe Bends With Different Angles R2Document4 paginiStressman Engineering - Study - Stresses in Pipe Bends With Different Angles R2Desmond ChangÎncă nu există evaluări
- Pipe Stresses and B31.3 Effects of Pipe StressDocument22 paginiPipe Stresses and B31.3 Effects of Pipe Stress20jose12luisÎncă nu există evaluări
- 2905 - Edgar EXPANSION JOINTS WITH CAESAR IIDocument45 pagini2905 - Edgar EXPANSION JOINTS WITH CAESAR IIDivyesh Patel100% (1)
- C2 CAU Express Load CasesDocument25 paginiC2 CAU Express Load Casesphunghalong100% (1)
- 4 C2 CAU Express Load Cases 2012Document49 pagini4 C2 CAU Express Load Cases 2012zahoorÎncă nu există evaluări
- Modal Screening Guide for Dynamic Piping AnalysisDocument21 paginiModal Screening Guide for Dynamic Piping AnalysisWaseem HakeemÎncă nu există evaluări
- Stress analysis and support of distillation column pipingDocument6 paginiStress analysis and support of distillation column pipingsj22Încă nu există evaluări
- Must Have Load Cases For Stress Analysis of A Typical Piping System Using Caesar IIDocument4 paginiMust Have Load Cases For Stress Analysis of A Typical Piping System Using Caesar IIKaliya Perumal100% (2)
- Load Case Definition in CAESAR IIDocument8 paginiLoad Case Definition in CAESAR IINilesh Gohel100% (1)
- 04 - Branch ConnectionsDocument24 pagini04 - Branch Connectionsdario84100% (1)
- RPS Support CatalogueDocument49 paginiRPS Support Catalogueravivarmadatla2011Încă nu există evaluări
- Configuration Caesar IIDocument69 paginiConfiguration Caesar IIJesusDiFabio100% (2)
- Institute of Advance Pipe Stress Analysis in MumbaiDocument2 paginiInstitute of Advance Pipe Stress Analysis in MumbaiSuvidya Institute of TechnologyÎncă nu există evaluări
- c2 - Static Load Case EditorDocument22 paginic2 - Static Load Case EditorEsapermana RiyanÎncă nu există evaluări
- CAESAR II Updates for ASME B31.3 ChangesDocument57 paginiCAESAR II Updates for ASME B31.3 ChangesBhoopendra Singh100% (1)
- Simulation of Tees Reveals Stress IntensificationDocument7 paginiSimulation of Tees Reveals Stress IntensificationDesmond ChangÎncă nu există evaluări
- Piping Stress 123Document8 paginiPiping Stress 123Arun NambiarÎncă nu există evaluări
- PIPING-EQUIPMENT INTERFACE LOAD CALCULATIONSDocument23 paginiPIPING-EQUIPMENT INTERFACE LOAD CALCULATIONSOmerQusayÎncă nu există evaluări
- Overview of GRP PipesDocument14 paginiOverview of GRP PipesMD IBRARÎncă nu există evaluări
- KVERNAR - Stress NotesDocument54 paginiKVERNAR - Stress NoteszahoorÎncă nu există evaluări
- Fluid Flow's Influence: On The Structural Response of Piping Systems and Their AnalysisDocument19 paginiFluid Flow's Influence: On The Structural Response of Piping Systems and Their Analysisb4sukiÎncă nu există evaluări
- SlugDocument1 paginăSlugtibor121774_66173108100% (1)
- Load Cases For Stress Analysis of A Critical Piping System Using Caesar II PDFDocument6 paginiLoad Cases For Stress Analysis of A Critical Piping System Using Caesar II PDFmaxalfre100% (1)
- AFT Evaluating Pipe Dynamic Loads Caused by WaterhammerDocument24 paginiAFT Evaluating Pipe Dynamic Loads Caused by WaterhammerroyalcomÎncă nu există evaluări
- CAESARII Output WebinarDocument43 paginiCAESARII Output WebinarAnkithÎncă nu există evaluări
- Introduction To Pipe Stress Analysis and CAESAR II 1640964803Document40 paginiIntroduction To Pipe Stress Analysis and CAESAR II 1640964803Sirri SaktiÎncă nu există evaluări
- Pipeline Stress Analysis with Caesar IIDocument16 paginiPipeline Stress Analysis with Caesar IIPugel YeremiasÎncă nu există evaluări
- SIF Pipe Stress ChecklistDocument2 paginiSIF Pipe Stress ChecklistkparthypanÎncă nu există evaluări
- A Brief Description of Sway Brace, Strut and Snubber (Dynamic Restraints) For Pipe Supporting For Process IndustriesDocument7 paginiA Brief Description of Sway Brace, Strut and Snubber (Dynamic Restraints) For Pipe Supporting For Process IndustriesiaftÎncă nu există evaluări
- CAESAR Load CaseDocument15 paginiCAESAR Load Casevijayanmks100% (1)
- History of WRC 107: Presented By: Ray DelaforceDocument36 paginiHistory of WRC 107: Presented By: Ray DelaforceDenny ThomasÎncă nu există evaluări
- Piping Stress Analysis Pipeline System in Offshore PlatformDocument2 paginiPiping Stress Analysis Pipeline System in Offshore Platformgpskumar22100% (1)
- Load Cases in CAESARDocument1 paginăLoad Cases in CAESARmasoud132Încă nu există evaluări
- A more consistent pressure equivalent method for piping flangesDocument4 paginiA more consistent pressure equivalent method for piping flangesZAZZERA125Încă nu există evaluări
- Special Pipe SupportsDocument293 paginiSpecial Pipe SupportsVijay_Damam100% (2)
- Slug Flow Analysis Using Dynamic Spectrum Method in Caesar IIDocument7 paginiSlug Flow Analysis Using Dynamic Spectrum Method in Caesar IIJ A S JASÎncă nu există evaluări
- Caesar II FaqsDocument18 paginiCaesar II FaqsVolodymyr Pryz100% (1)
- Taller3 Modeling Concepts in Buried Pipe AnalysisDocument29 paginiTaller3 Modeling Concepts in Buried Pipe AnalysisFSAAVEDRAF100% (1)
- Presentation On SPRING HANGERDocument113 paginiPresentation On SPRING HANGERvishal MauryaÎncă nu există evaluări
- Stress Intensification - Flexibility in Pipe Stress Analysis PDFDocument6 paginiStress Intensification - Flexibility in Pipe Stress Analysis PDFcelermÎncă nu există evaluări
- Modelling Dresser Couplings in Caesar IIDocument34 paginiModelling Dresser Couplings in Caesar IIAndrew AlexÎncă nu există evaluări
- Piping Material Specification-GeneralDocument15 paginiPiping Material Specification-GeneralTejas PatelÎncă nu există evaluări
- SPRING SUPPORTS FOR PIPING THERMAL EXPANSIONDocument1 paginăSPRING SUPPORTS FOR PIPING THERMAL EXPANSIONtibor121774_66173108Încă nu există evaluări
- LIFT OFF ModuleDocument28 paginiLIFT OFF ModulericardoÎncă nu există evaluări
- F KX PPT Handouts With MathcadDocument57 paginiF KX PPT Handouts With Mathcadeko123Încă nu există evaluări
- The CAESAR II Piping Model: How Good Is It?Document50 paginiThe CAESAR II Piping Model: How Good Is It?Mark MacIntyreÎncă nu există evaluări
- Cau 2014Document25 paginiCau 2014vinay1999Încă nu există evaluări
- 3D CFD Modelling of Spillways Practical Feedback On Capabilities and Challenges PDFDocument7 pagini3D CFD Modelling of Spillways Practical Feedback On Capabilities and Challenges PDFIsma FajarÎncă nu există evaluări
- Siwarex U Quick Guide v3 1Document15 paginiSiwarex U Quick Guide v3 1Chan Kok LamÎncă nu există evaluări
- Study On Fatigue Life Assessment of Offshore Platform Lattice Crane in ServiceDocument12 paginiStudy On Fatigue Life Assessment of Offshore Platform Lattice Crane in ServiceRamchandraÎncă nu există evaluări
- Stress Analysis of Process Pipe Line Systems (ASME B 31.3) in A Plant Using Caeser-IIDocument7 paginiStress Analysis of Process Pipe Line Systems (ASME B 31.3) in A Plant Using Caeser-IICarlos BorgesÎncă nu există evaluări
- Stress Analysis of Process Pipe Line Systems (ASME B 31.3) in A Plant Using Caeser-IIDocument7 paginiStress Analysis of Process Pipe Line Systems (ASME B 31.3) in A Plant Using Caeser-IISandeep BhatiaÎncă nu există evaluări
- USACE - Water Hammer and Mass Oscillation (WHAMO) Ver. 3.0 - UserDocument256 paginiUSACE - Water Hammer and Mass Oscillation (WHAMO) Ver. 3.0 - UserAdrian FrantescuÎncă nu există evaluări
- f201508151439617857 PDFDocument6 paginif201508151439617857 PDFh_alimohamÎncă nu există evaluări
- p8 BB 6000Document4 paginip8 BB 6000Ramesh KrishnanÎncă nu există evaluări
- CLAMPSDocument37 paginiCLAMPSRamesh KrishnanÎncă nu există evaluări
- 3D Isometric 5mm A3 Graph PaperDocument1 pagină3D Isometric 5mm A3 Graph PaperguivalinuxÎncă nu există evaluări
- PTFE Slide BearingsDocument5 paginiPTFE Slide BearingsUlissipo1955Încă nu există evaluări
- PSL DefinationDocument2 paginiPSL DefinationRamesh KrishnanÎncă nu există evaluări
- Thick Thin CylindersDocument14 paginiThick Thin CylindersRamesh KrishnanÎncă nu există evaluări
- WaterHammer CAESERDocument15 paginiWaterHammer CAESERvishalmisal100% (1)
- AWS WZC/D19.0-72 Welding Zinc-Coated SteelDocument6 paginiAWS WZC/D19.0-72 Welding Zinc-Coated SteelRamesh KrishnanÎncă nu există evaluări
- Thick Thin Cylinders Pressure Vessel. PPT in PDFDocument5 paginiThick Thin Cylinders Pressure Vessel. PPT in PDFlram70Încă nu există evaluări
- Nozzle Loads Piping Stresses and The Effect of Piping On EquipmentDocument40 paginiNozzle Loads Piping Stresses and The Effect of Piping On Equipmentcaesar00100% (6)
- ASME B16.48 2010 Line BlanksDocument56 paginiASME B16.48 2010 Line BlanksRamesh Krishnan100% (2)
- Buckling Analysis MethodologyDocument5 paginiBuckling Analysis MethodologyRamesh KrishnanÎncă nu există evaluări
- Catalogue of ValvesDocument52 paginiCatalogue of ValvesMarlon TurnerÎncă nu există evaluări
- Vanessa Basic Datasheet-Valves PDFDocument10 paginiVanessa Basic Datasheet-Valves PDFGogyÎncă nu există evaluări
- Rubber CatalogDocument42 paginiRubber CatalogRamesh KrishnanÎncă nu există evaluări
- ESLIN Rubber Lined U-Bolts Prevent CorrosionDocument15 paginiESLIN Rubber Lined U-Bolts Prevent CorrosionRamesh KrishnanÎncă nu există evaluări
- Site Survey RequirementDocument14 paginiSite Survey RequirementRamesh Krishnan100% (1)
- PTFE Slide BearingsDocument5 paginiPTFE Slide BearingsUlissipo1955Încă nu există evaluări
- Valves, Types and OperationsDocument50 paginiValves, Types and OperationsOsama Hasan100% (18)
- 1032A Chockfast Orange-Industrial PDFDocument2 pagini1032A Chockfast Orange-Industrial PDFRamesh KrishnanÎncă nu există evaluări
- WRC Buletine 330 RelatedDocument4 paginiWRC Buletine 330 RelatedRamesh KrishnanÎncă nu există evaluări
- Caesar Ii: Applications GuideDocument279 paginiCaesar Ii: Applications GuidePatranÎncă nu există evaluări
- Valve Trim Material and SpecDocument28 paginiValve Trim Material and SpecRamesh KrishnanÎncă nu există evaluări
- 3D Isometric 5mm A3 Graph PaperDocument1 pagină3D Isometric 5mm A3 Graph PaperguivalinuxÎncă nu există evaluări
- CP Catalogue 2010Document164 paginiCP Catalogue 2010Marie SaundersÎncă nu există evaluări
- Input EchoDocument68 paginiInput EchoRamesh KrishnanÎncă nu există evaluări
- Allowable Nozzle LoadsDocument6 paginiAllowable Nozzle LoadsAlan Crocher100% (2)
- Buckling Analysis MethodologyDocument26 paginiBuckling Analysis MethodologyRamesh Krishnan100% (1)
- 16147-Shoe With Gusset No RepadDocument5 pagini16147-Shoe With Gusset No RepadRamesh Krishnan100% (1)
- Pub Mac Os X HacksDocument557 paginiPub Mac Os X HackshanimsofiaÎncă nu există evaluări
- User Manual BeelineDocument16 paginiUser Manual BeelinePurwanto Soe'ebÎncă nu există evaluări
- Plasma TV: A Brief History and OverviewDocument3 paginiPlasma TV: A Brief History and OverviewGrandcMoonlightÎncă nu există evaluări
- Sunil Telecom Catalogue (S) - 20190902Document28 paginiSunil Telecom Catalogue (S) - 20190902Ayeshan LahiruÎncă nu există evaluări
- LT7 Tractor Operator Manual IM279Document88 paginiLT7 Tractor Operator Manual IM279Waldo AtÎncă nu există evaluări
- Conference Template A4Document4 paginiConference Template A4ATHIRA V RÎncă nu există evaluări
- Kernel Modules and Device Drivers, DemystifiedDocument4 paginiKernel Modules and Device Drivers, DemystifiedJournalNX - a Multidisciplinary Peer Reviewed JournalÎncă nu există evaluări
- Non-Linear Multimedia Projects InteractiveDocument4 paginiNon-Linear Multimedia Projects Interactiveمحمد شافعيÎncă nu există evaluări
- Vho Passive Materials Bhubaneswar Check ListDocument6 paginiVho Passive Materials Bhubaneswar Check ListBiswajit SahooÎncă nu există evaluări
- X65x Series: Machine Type 7462-xxxxDocument730 paginiX65x Series: Machine Type 7462-xxxxemersonrodrigoÎncă nu există evaluări
- Brake Control SystemDocument24 paginiBrake Control SystemAditya PangestuÎncă nu există evaluări
- GWA Calculator by FilipiKnowDocument14 paginiGWA Calculator by FilipiKnowMJ HagosÎncă nu există evaluări
- CK 1 (L) PDFDocument198 paginiCK 1 (L) PDFbetsabe12366Încă nu există evaluări
- iHMI Intro Flyer-ENDocument4 paginiiHMI Intro Flyer-ENMarcelo MonteroÎncă nu există evaluări
- Monitor & Administer System & Network SecurityDocument47 paginiMonitor & Administer System & Network SecurityTsehayou Sieley90% (10)
- Telemecanique Type XPS-AFDocument24 paginiTelemecanique Type XPS-AFHenrique Ribeiro OliveiraÎncă nu există evaluări
- HOW To Perform A Hardware Independent Restore (HIR)Document22 paginiHOW To Perform A Hardware Independent Restore (HIR)Darren RadonsÎncă nu există evaluări
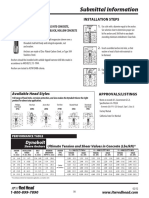
- Submittal Information: Dynabolt SleeveDocument2 paginiSubmittal Information: Dynabolt Sleeveanto081287Încă nu există evaluări
- Main Project AbstractDocument2 paginiMain Project AbstractAjay YeruvaÎncă nu există evaluări
- Cache SolutionsDocument6 paginiCache SolutionsKannan KaruppiahÎncă nu există evaluări
- Codigos de FallaDocument5 paginiCodigos de FallaLuis Angel Condori MoralesÎncă nu există evaluări
- MGS100 Technical Datasheet Final Rev-A ABBDocument2 paginiMGS100 Technical Datasheet Final Rev-A ABBRicardo MartinsÎncă nu există evaluări
- Ch2 Process SchedulingDocument13 paginiCh2 Process SchedulingSowmiyiaÎncă nu există evaluări
- Global Technical Services Quick Start GuideDocument25 paginiGlobal Technical Services Quick Start Guidezael1987Încă nu există evaluări
- 8051 (Volume-1)Document322 pagini8051 (Volume-1)Muhammad Rizwan Haider DurraniÎncă nu există evaluări
- Catalog Netline 2Document5 paginiCatalog Netline 2Ciprian DemianÎncă nu există evaluări
- Description Features: ENC6800+ENS6800+Document2 paginiDescription Features: ENC6800+ENS6800+David ToroÎncă nu există evaluări
- Computer System Architecture Question PaperDocument2 paginiComputer System Architecture Question PaperHimanshu AggarwalÎncă nu există evaluări
- S54721 ADocument18 paginiS54721 AJaime ArreolaÎncă nu există evaluări
- Component Maintenance Manual With Illustrated Parts ListDocument73 paginiComponent Maintenance Manual With Illustrated Parts ListGoutam Saha100% (1)