S-ar putea să vă placă și
- Jueves 3 de OctubreDocument1 paginăJueves 3 de OctubreCristhian LucasÎncă nu există evaluări
- ConsultaDocument3 paginiConsultaCristhian LucasÎncă nu există evaluări
- Consulta 2Document6 paginiConsulta 2Cristhian LucasÎncă nu există evaluări
- Consulta 2 IsabelDocument8 paginiConsulta 2 IsabelCristhian LucasÎncă nu există evaluări
- Tipos de Transmisión de DatosDocument7 paginiTipos de Transmisión de DatosCristhian LucasÎncă nu există evaluări
- Claves de San Andres 2Document1 paginăClaves de San Andres 2Cristhian LucasÎncă nu există evaluări
- Extremos De'portesDocument4 paginiExtremos De'portesCristhian LucasÎncă nu există evaluări
- Normativa Aplicada A Los Sistemas de Puesta A TierraDocument2 paginiNormativa Aplicada A Los Sistemas de Puesta A TierraCristhian LucasÎncă nu există evaluări
- ConsultaDocument7 paginiConsultaCristhian LucasÎncă nu există evaluări
- Electronica de PotenciaDocument6 paginiElectronica de PotenciaCristhian LucasÎncă nu există evaluări
- Consulta 2 IsabelDocument8 paginiConsulta 2 IsabelCristhian LucasÎncă nu există evaluări
- Tipos de ArrancadoresDocument3 paginiTipos de ArrancadoresCristhian Lucas100% (2)
- La Naturaleza de La FisicaDocument5 paginiLa Naturaleza de La FisicaCristhian LucasÎncă nu există evaluări
- Comando de ProgramacionDocument2 paginiComando de ProgramacionCristhian LucasÎncă nu există evaluări
- Tareas1 SepDocument1 paginăTareas1 SepMaxwell DSÎncă nu există evaluări
- AparatosDocument2 paginiAparatosCristhian LucasÎncă nu există evaluări
- Consulta 2Document6 paginiConsulta 2Cristhian LucasÎncă nu există evaluări
- Sistema Dcs...Document4 paginiSistema Dcs...Cristhian LucasÎncă nu există evaluări
- Factor de PotenciaDocument6 paginiFactor de PotenciaCristhian LucasÎncă nu există evaluări
- Factor de PotenciaDocument6 paginiFactor de PotenciaCristhian LucasÎncă nu există evaluări
- Símbolos Gráficos para EsquemasDocument12 paginiSímbolos Gráficos para EsquemasCristhian LucasÎncă nu există evaluări
- Ing FinancieraDocument8 paginiIng FinancieraCristhian LucasÎncă nu există evaluări
- E Structuralism oDocument3 paginiE Structuralism oCristhian LucasÎncă nu există evaluări
- Claves de San Andres 2Document1 paginăClaves de San Andres 2Cristhian LucasÎncă nu există evaluări
- Preguntas AtnDocument31 paginiPreguntas AtnCristhian LucasÎncă nu există evaluări
- Estamos TrabajandoDocument1 paginăEstamos TrabajandoCristhian LucasÎncă nu există evaluări
- Caratula Universidad TécnicaDocument2 paginiCaratula Universidad TécnicaCristhian LucasÎncă nu există evaluări
- Prueba en DialuxDocument2 paginiPrueba en DialuxCristhian LucasÎncă nu există evaluări
- PropocicionDocument2 paginiPropocicionCristhian LucasÎncă nu există evaluări
- As, Es, Is, Os, UsDocument1 paginăAs, Es, Is, Os, UsCristhian LucasÎncă nu există evaluări
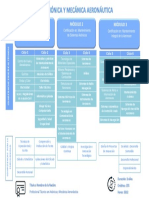
- Certificación en Mantenimiento Aeronáutico: Módulos, Competencias y DuraciónDocument1 paginăCertificación en Mantenimiento Aeronáutico: Módulos, Competencias y DuraciónDiego Carhuaz VasquezÎncă nu există evaluări
- Fisica Conceptual Capítulo 10Document4 paginiFisica Conceptual Capítulo 10Alexis Valerio100% (1)
- Sistema SolarDocument15 paginiSistema SolarGilmerFloresHÎncă nu există evaluări
- Mujeres pioneras NASADocument2 paginiMujeres pioneras NASADavid ProañoÎncă nu există evaluări
- Examen Teórico para Obtener o Renovar Credencial de OPERADOR RPAS PDFDocument3 paginiExamen Teórico para Obtener o Renovar Credencial de OPERADOR RPAS PDFalejamdro Pardo100% (1)
- Científico colombiano Raúl Cuero habla de su infancia, inventos y parques de la creatividadDocument2 paginiCientífico colombiano Raúl Cuero habla de su infancia, inventos y parques de la creatividadVanessa López Suaza0% (2)
- Crónicas MarcianasDocument7 paginiCrónicas MarcianasLukas BenavidesÎncă nu există evaluări
- Evolución Geológica de La Tierra PDFDocument30 paginiEvolución Geológica de La Tierra PDFJorge IbarraÎncă nu există evaluări
- Nom 011 sct3 2001Document15 paginiNom 011 sct3 2001Oscar de LeonÎncă nu există evaluări
- Sistema Estelar Alfa CentauriDocument2 paginiSistema Estelar Alfa CentauriCristhian DiazÎncă nu există evaluări
- Escenas de La Nave EspacialDocument2 paginiEscenas de La Nave EspacialIsabella AndéricoÎncă nu există evaluări
- TheCat ESP LowDocument83 paginiTheCat ESP LowArturo ZacamoÎncă nu există evaluări
- Space XDocument12 paginiSpace XMiriam Itzel Martínez ArandaÎncă nu există evaluări
- Examen Bloque 2 2015 110 CorrDocument15 paginiExamen Bloque 2 2015 110 CorrgabyÎncă nu există evaluări
- AeronavesDocument26 paginiAeronavesKarencitaÎncă nu există evaluări
- Exposicion Geologia Jupiter y SaturnoDocument12 paginiExposicion Geologia Jupiter y SaturnohikenÎncă nu există evaluări
- Ayuda para RedaccionDocument2 paginiAyuda para RedaccionGabriela PerezÎncă nu există evaluări
- Mitologia GriegaDocument2 paginiMitologia GriegaCarlos Torres CastañedaÎncă nu există evaluări
- Satélites MeteorológicosDocument9 paginiSatélites MeteorológicoslarryÎncă nu există evaluări
- Certamen1 FIS100 (2005) PDFDocument8 paginiCertamen1 FIS100 (2005) PDFanon_151507246Încă nu există evaluări
- Carlos y El Viaje A AstúnduruDocument10 paginiCarlos y El Viaje A AstúnduruAstrikKeinTorres60% (5)
- Pocketbook MARSDocument1 paginăPocketbook MARSPedro AngelesÎncă nu există evaluări
- AstronomíaDocument8 paginiAstronomíapabblosilupuÎncă nu există evaluări
- El teatro de los planetas: presentación de los personajes del Sistema SolarDocument5 paginiEl teatro de los planetas: presentación de los personajes del Sistema SolarBerrnardita AstudillodiazÎncă nu există evaluări
- Ejercicio DidacticosDocument13 paginiEjercicio DidacticosfredyÎncă nu există evaluări
- IntroducciónDocument11 paginiIntroducciónGerald Postigo FranciaÎncă nu există evaluări
- Planeta Venus: características claveDocument1 paginăPlaneta Venus: características clavemarioÎncă nu există evaluări
- El Zorro Enamorado de La Luna. Cuento Nº7Document8 paginiEl Zorro Enamorado de La Luna. Cuento Nº7RoxanaÎncă nu există evaluări
- Descripción InformativaDocument2 paginiDescripción InformativaEmbaexÎncă nu există evaluări
- Mensaje de DrunvaloDocument3 paginiMensaje de DrunvaloinmatxetxuÎncă nu există evaluări