S-ar putea să vă placă și
- Manual Practicas Sistemas LogicosDocument52 paginiManual Practicas Sistemas Logicostincho_0026Încă nu există evaluări
- Practicas2006 PDFDocument32 paginiPracticas2006 PDFsepiaaaaÎncă nu există evaluări
- Semaforo Con Focos A 120v Con Triac y Moc3010Document9 paginiSemaforo Con Focos A 120v Con Triac y Moc3010magus_ga100% (1)
- Labo 2Document13 paginiLabo 2Kevin Apaza SoriaÎncă nu există evaluări
- Secuencias Inst. ResidencialesDocument30 paginiSecuencias Inst. Residenciales840702100% (6)
- Field BusDocument27 paginiField BusAndre Williams Montenegro SalcedoÎncă nu există evaluări
- 001 - Practicas Domotica Con Logo!Document2 pagini001 - Practicas Domotica Con Logo!José Luis Granero MontesinosÎncă nu există evaluări
- Practica 08 - Instalación de Alumbrado Con LOGODocument2 paginiPractica 08 - Instalación de Alumbrado Con LOGOJosé Luis Granero MontesinosÎncă nu există evaluări
- Trabajo Domótica PDFDocument25 paginiTrabajo Domótica PDFAlberto Freire MartinezÎncă nu există evaluări
- b2 Montajes Basicos Sobre TableroDocument26 paginib2 Montajes Basicos Sobre TableroJuan Alberto Gallego MoralesÎncă nu există evaluări
- Constantes y Variables BooleanasDocument30 paginiConstantes y Variables BooleanasHeyner Romero DÎncă nu există evaluări
- Propuesta Diplomado SchneiderDocument24 paginiPropuesta Diplomado SchneiderEliseo MartinezÎncă nu există evaluări
- LabVIEW Revista Enero Marzo 2013Document28 paginiLabVIEW Revista Enero Marzo 2013Carlos Iván RuedaÎncă nu există evaluări
- DL 2110-131k (PLC Siemens)Document107 paginiDL 2110-131k (PLC Siemens)Delfino TarinÎncă nu există evaluări
- Reporte de PLCDocument14 paginiReporte de PLCErnesto VenturaÎncă nu există evaluări
- Política CurricularDocument92 paginiPolítica CurricularDelaliÎncă nu există evaluări
- Laboratorio 1 VDFDocument14 paginiLaboratorio 1 VDFCristian Espinoza MaffeiÎncă nu există evaluări
- Dynatel 965 DSPINTERACTIVADocument28 paginiDynatel 965 DSPINTERACTIVAFrederick Lucas100% (1)
- Que Es Una Red Informatica 1Document3 paginiQue Es Una Red Informatica 1Mariianne SaucedoÎncă nu există evaluări
- As IDocument13 paginiAs IlcastroqÎncă nu există evaluări
- Propuesta Manual PracticasDocument13 paginiPropuesta Manual PracticasJuan M. UrquizaÎncă nu există evaluări
- Mando de Un MotorDocument4 paginiMando de Un MotorFreddy FajardoÎncă nu există evaluări
- 000359-00 Manual Uso Salduba FutureDocument36 pagini000359-00 Manual Uso Salduba FuturemalejarojaslÎncă nu există evaluări
- Semaforo de Dos ViasDocument8 paginiSemaforo de Dos ViasDiego HaroÎncă nu există evaluări
- Calibrador de ProcesosDocument61 paginiCalibrador de ProcesosJuan Roldán Castillo100% (2)
- Unitrain PDFDocument18 paginiUnitrain PDFAnonymous wO06EpkoSUÎncă nu există evaluări
- 1 Tarea 4 Semestre (Automatización y PLC)Document30 pagini1 Tarea 4 Semestre (Automatización y PLC)Jose Dirseu Lopez ReyesÎncă nu există evaluări
- Introduccion A La Instrumentacion y NormasDocument20 paginiIntroduccion A La Instrumentacion y NormasHerman Giron JimenezÎncă nu există evaluări
- Trabajo Rele PIDocument54 paginiTrabajo Rele PIMartin GonzalezÎncă nu există evaluări
- Libro - FinalDocument62 paginiLibro - FinalJhoana YucraÎncă nu există evaluări
- Sentron Pac3200Document8 paginiSentron Pac3200amds2011100% (1)
- Taller Planeando AndoDocument5 paginiTaller Planeando AndoManuel Ramirez50% (2)
- Laboratorio 4 - Configuracion de PLC SchneiderDocument16 paginiLaboratorio 4 - Configuracion de PLC SchneiderZamora Ventura JhossepÎncă nu există evaluări
- IMFORME LAB Funciones Logicas y Aritmeticas Son Señales AnaloicasDocument4 paginiIMFORME LAB Funciones Logicas y Aritmeticas Son Señales AnaloicasVladimir Quispe CutipaÎncă nu există evaluări
- Tesla Logo Marca 2008Document6 paginiTesla Logo Marca 2008Liam JJ0% (1)
- GUIA Practica PLC 2Document9 paginiGUIA Practica PLC 2tatocinoÎncă nu există evaluări
- Proyecto FinalDocument17 paginiProyecto FinalChristian DavidÎncă nu există evaluări
- Formación de Profesores Universitarios Un Diagnóstico de Necesid PDFDocument188 paginiFormación de Profesores Universitarios Un Diagnóstico de Necesid PDFLEONARDO MORENO COLLAZOSÎncă nu există evaluări
- Curso - Introduccion Al PLC Micro 1Document6 paginiCurso - Introduccion Al PLC Micro 1Manigoldo De la Cruz100% (2)
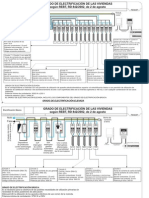
- Grado de Electrificacion ElevadoDocument2 paginiGrado de Electrificacion ElevadocualquieraqueseaÎncă nu există evaluări
- M. Diseño Del Automatismos Del Sistema MecatrónicoDocument49 paginiM. Diseño Del Automatismos Del Sistema MecatrónicoJuliana Vallejo0% (1)
- Guía de Variadores de VelocidadDocument30 paginiGuía de Variadores de VelocidadJoelÎncă nu există evaluări
- Lab 12 y 13Document9 paginiLab 12 y 13Jose Bejarano Quispe100% (1)
- UNIDAD V - Sistemas Programables - TemarioDocument8 paginiUNIDAD V - Sistemas Programables - TemarioAnonymous uoxMueÎncă nu există evaluări
- Servidor Web ESP8266Document18 paginiServidor Web ESP8266Fernando HdzÎncă nu există evaluări
- Introducción A Los DCSDocument5 paginiIntroducción A Los DCSJhoan Araujo100% (1)
- Programación de Controles Lógicos Programables (PLC) : Instrumentista Industrial Código: PL.3.4.2-10373/19 Edición 01Document9 paginiProgramación de Controles Lógicos Programables (PLC) : Instrumentista Industrial Código: PL.3.4.2-10373/19 Edición 01jonatanÎncă nu există evaluări
- Introduccion LabVIEW - Seis HorasDocument45 paginiIntroduccion LabVIEW - Seis HorasAleksei Vasquez100% (1)
- Informe Proyecto FinalDocument27 paginiInforme Proyecto FinalAnbech AnselmoÎncă nu există evaluări
- Proyecto. Sistema de Reconocimiento de VozDocument19 paginiProyecto. Sistema de Reconocimiento de VozBruno Abello HurtadoÎncă nu există evaluări
- Reconocimiento de Voz en Matlab 2014aDocument3 paginiReconocimiento de Voz en Matlab 2014aMediosVirtualesÎncă nu există evaluări
- Formato para El Trabajo Final de Asignatura (21-22)Document10 paginiFormato para El Trabajo Final de Asignatura (21-22)Santi SarangoÎncă nu există evaluări
- Activación de Funciones en EdificiosDocument4 paginiActivación de Funciones en EdificiosPamela CastilloÎncă nu există evaluări
- Alexa. Desarrollo de aplicaciones IoT para Arduino y ESP8266De la EverandAlexa. Desarrollo de aplicaciones IoT para Arduino y ESP8266Încă nu există evaluări
- Proyecto MetodologiaDocument5 paginiProyecto MetodologiaSofía MorenoÎncă nu există evaluări
- Domotica: Casas InteligentesDocument7 paginiDomotica: Casas InteligentesSantiago DelgadoÎncă nu există evaluări
- Plataformas InformaticasDocument14 paginiPlataformas InformaticasRichard BlancoÎncă nu există evaluări
- Aquitectura de Los Dispositivos MovilesDocument8 paginiAquitectura de Los Dispositivos MovilesʟᴏᴠᴇʟɪᴇᴇÎncă nu există evaluări
- Smart Virtual Assistant (Traducción)Document4 paginiSmart Virtual Assistant (Traducción)Larry SÎncă nu există evaluări
- Paper Audiometro VirtualDocument6 paginiPaper Audiometro VirtualtonyÎncă nu există evaluări
- Tarea N°1 - Modulo N°1Document3 paginiTarea N°1 - Modulo N°1Rosa Isabel Juscamayta Espichan75% (4)
- Guia de Apendizaje 1Document20 paginiGuia de Apendizaje 1cristian sanvovalÎncă nu există evaluări
- Cuestionario N 1Document3 paginiCuestionario N 1Luis fiat luxÎncă nu există evaluări
- Carta Escrita en El Año 2050Document2 paginiCarta Escrita en El Año 2050Xavier Lopinta León100% (1)
- Agentes de LimpiezaDocument38 paginiAgentes de LimpiezaDenis Cruz VillegasÎncă nu există evaluări
- Higiene DeportivaDocument3 paginiHigiene DeportivaBarbara CuevasÎncă nu există evaluări
- Trabajo Sobre ¿Qué InvestigarDocument4 paginiTrabajo Sobre ¿Qué InvestigarCarlos MachaccaÎncă nu există evaluări
- Preparando El Examen Final Caso Cal2 2019 2Document14 paginiPreparando El Examen Final Caso Cal2 2019 2Aaron Ramirez33% (3)
- Trendhunting Lienzo de Adn de InnovaciónDocument9 paginiTrendhunting Lienzo de Adn de InnovaciónJader E. OrtzÎncă nu există evaluări
- Plan de Operacion de Mantenimiento - MaraDocument21 paginiPlan de Operacion de Mantenimiento - Maraanthony valer sanchez0% (1)
- La Yarada Modelamiento MasterDocument10 paginiLa Yarada Modelamiento Masteraleoli2009Încă nu există evaluări
- Desarrollo Endógeno y Agroecología.Document14 paginiDesarrollo Endógeno y Agroecología.jean paredesÎncă nu există evaluări
- El Secado Al VacioDocument53 paginiEl Secado Al VacioAlfredo AlejosÎncă nu există evaluări
- Surfactante ExógenoDocument24 paginiSurfactante ExógenoNervys PérezÎncă nu există evaluări
- Caracterizacion de Una CuencaDocument12 paginiCaracterizacion de Una Cuencadeyvid_p7Încă nu există evaluări
- Exposición Oxígeno DisueltoDocument10 paginiExposición Oxígeno DisueltoyobissÎncă nu există evaluări
- Tablas de Valor Nutricional de Alimentos EN Guatemala. Altiplano Central Y en La Cuenca Ganadera deDocument0 paginiTablas de Valor Nutricional de Alimentos EN Guatemala. Altiplano Central Y en La Cuenca Ganadera deOMAR_ZOOTECNIAÎncă nu există evaluări
- Tratamientos de Residuos I. ModulosDocument211 paginiTratamientos de Residuos I. Modulosjavier bracamonteÎncă nu există evaluări
- Reporte de Practica 4 FQDocument9 paginiReporte de Practica 4 FQMiguel Angel BarreraÎncă nu există evaluări
- Juegos Didacticos para Los Planes de ClaseDocument81 paginiJuegos Didacticos para Los Planes de ClaseRoberto CaizaÎncă nu există evaluări
- Aqualock Bloqueador de AguaDocument3 paginiAqualock Bloqueador de AguaMarioFloresÎncă nu există evaluări
- En Centroamérica Se Conoce El Caso Del Imperio Maya Donde Sus Reyes Sostenían A Sus Pueblos de Modos PrácticosDocument1 paginăEn Centroamérica Se Conoce El Caso Del Imperio Maya Donde Sus Reyes Sostenían A Sus Pueblos de Modos PrácticosNelson Rene Hidalgo MerasÎncă nu există evaluări
- Final Biologia 7° Periodo Ii 2019Document5 paginiFinal Biologia 7° Periodo Ii 2019Marisela caro garcia100% (1)
- Informe10 - Determinación de Fosfatos en Agua Por EspectrofotometríaDocument11 paginiInforme10 - Determinación de Fosfatos en Agua Por EspectrofotometríaAbner Ezequiel valdivieso palmaÎncă nu există evaluări
- Informe Mensual Set-19Document51 paginiInforme Mensual Set-19Herlin Luis Challco HuallpaÎncă nu există evaluări
- Presentacion Final HidrologiaDocument16 paginiPresentacion Final HidrologiaWalker MendezÎncă nu există evaluări
- Drenajes Longitudinale Y TransversalesDocument11 paginiDrenajes Longitudinale Y Transversales'Luis Alejandro YnfanteÎncă nu există evaluări
- 02.01 Metrado Ubs-Ah Tipo 1Document14 pagini02.01 Metrado Ubs-Ah Tipo 1Blady Rivas RamosÎncă nu există evaluări
- Direccion Planeacion ConstruccionDocument61 paginiDireccion Planeacion ConstruccionElr Arquitectura IngenieriaÎncă nu există evaluări
- Centurion Super Etiqueta 24-06-2022Document1 paginăCenturion Super Etiqueta 24-06-2022Ricardo Rodriguez CastilloÎncă nu există evaluări