S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- NASA Project Mercury Maintenance Manual - 1959Document472 paginiNASA Project Mercury Maintenance Manual - 1959Orion2015100% (5)
- Disassembling System Unit Procedure and Safety PrecautionsDocument28 paginiDisassembling System Unit Procedure and Safety PrecautionsLourent Villy Conlu Casayuran100% (5)
- Unit 4 LP - Nandhakumar ADocument17 paginiUnit 4 LP - Nandhakumar AnandhakumarmeÎncă nu există evaluări
- Pole-Amplitude ModulationDocument6 paginiPole-Amplitude ModulationnandhakumarmeÎncă nu există evaluări
- 15ee408 Analog and Digital Integrated Circuits Laboratory 0 0 2 1 Course ObjectivesDocument3 pagini15ee408 Analog and Digital Integrated Circuits Laboratory 0 0 2 1 Course ObjectivesnandhakumarmeÎncă nu există evaluări
- Generator ProtectionDocument5 paginiGenerator ProtectionBala MÎncă nu există evaluări
- 123Document1 pagină123nandhakumarmeÎncă nu există evaluări
- Three Phase TransformersDocument15 paginiThree Phase TransformersnandhakumarmeÎncă nu există evaluări
- RelaysDocument1 paginăRelaysnandhakumarmeÎncă nu există evaluări
- Miles To KMDocument2 paginiMiles To KMnandhakumarmeÎncă nu există evaluări
- Structure of Power SystemDocument14 paginiStructure of Power Systemnandhakumarme100% (1)
- Auxiliary Word For RBT, BIT-1Document1 paginăAuxiliary Word For RBT, BIT-1nandhakumarmeÎncă nu există evaluări
- Operator ADocument3 paginiOperator AnandhakumarmeÎncă nu există evaluări
- One Mark QueDocument27 paginiOne Mark QuenandhakumarmeÎncă nu există evaluări
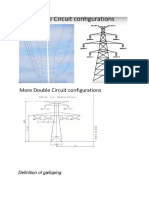
- Double CircuitDocument10 paginiDouble CircuitnandhakumarmeÎncă nu există evaluări
- Power Electronics Objective Questions With Answers: Part-10: Answer: BDocument3 paginiPower Electronics Objective Questions With Answers: Part-10: Answer: BnandhakumarmeÎncă nu există evaluări
- Obtain The Boolean Expression For The Circuit and Verify Its Truth TableDocument2 paginiObtain The Boolean Expression For The Circuit and Verify Its Truth TablenandhakumarmeÎncă nu există evaluări
- S7 Attendance Summary Report 141EE123 To 141EE144Document2 paginiS7 Attendance Summary Report 141EE123 To 141EE144nandhakumarmeÎncă nu există evaluări
- CLM-RBT Steps in DetailDocument1 paginăCLM-RBT Steps in DetailnandhakumarmeÎncă nu există evaluări
- Circuit Breakers IDocument21 paginiCircuit Breakers InandhakumarmeÎncă nu există evaluări
- Every DayDocument4 paginiEvery DaynandhakumarmeÎncă nu există evaluări
- Pe 13Document3 paginiPe 13nandhakumarmeÎncă nu există evaluări
- Gate Questions 2Document6 paginiGate Questions 2nandhakumarmeÎncă nu există evaluări
- Thyristor MCQDocument6 paginiThyristor MCQnandhakumarme0% (3)
- BLDCDocument42 paginiBLDCnandhakumarmeÎncă nu există evaluări
- Lic QPDocument4 paginiLic QPnandhakumarmeÎncă nu există evaluări
- 1.3 Series and Parallel Resistance NewDocument32 pagini1.3 Series and Parallel Resistance Newnandhakumarme64% (11)
- Pole-Amplitude ModulationDocument6 paginiPole-Amplitude ModulationnandhakumarmeÎncă nu există evaluări
- Procurement of Consumable ItemsDocument16 paginiProcurement of Consumable ItemsnandhakumarmeÎncă nu există evaluări
- Lic QPDocument4 paginiLic QPnandhakumarmeÎncă nu există evaluări
- 1.1 Energy BalanceDocument25 pagini1.1 Energy BalancenandhakumarmeÎncă nu există evaluări
- Catalog Process Performance 9AKK105944-En-06 2013Document128 paginiCatalog Process Performance 9AKK105944-En-06 2013Duy Anh TrầnÎncă nu există evaluări
- Electrical Diagram JT-90 24V SingleDocument5 paginiElectrical Diagram JT-90 24V SingleCatherine RiquelmeÎncă nu există evaluări
- Mosfet p7nc70zfpDocument13 paginiMosfet p7nc70zfptheodoru2014Încă nu există evaluări
- LA6541Document7 paginiLA6541Mango VerdeÎncă nu există evaluări
- Ec 930Document2 paginiEc 930Amit Garg100% (1)
- Pulse Delay Ranging PDFDocument12 paginiPulse Delay Ranging PDFMilorad PavlovicÎncă nu există evaluări
- SUN2000-185KTL-H1 Output Characteristics Curve: Huawei Technologies Co., LTDDocument6 paginiSUN2000-185KTL-H1 Output Characteristics Curve: Huawei Technologies Co., LTDSav SashaÎncă nu există evaluări
- CARESTREAM DRX-1 System Detector CARESTREAM DRX-1C System Detector CARESTREAM DRX 2530C Detector Model DRX 2530-01 User GuideDocument37 paginiCARESTREAM DRX-1 System Detector CARESTREAM DRX-1C System Detector CARESTREAM DRX 2530C Detector Model DRX 2530-01 User GuideTony KututoÎncă nu există evaluări
- Lab Viva QuestionDocument13 paginiLab Viva QuestionNarasimman Don100% (1)
- Chapter 9: 8086/8088 Hardware SpecificationsDocument105 paginiChapter 9: 8086/8088 Hardware Specificationssapna_eng4080Încă nu există evaluări
- LTF320HF01 SamsungDocument29 paginiLTF320HF01 Samsungmarius tanjalaÎncă nu există evaluări
- Data Sheet: CB-3-GDU-NF-13Document2 paginiData Sheet: CB-3-GDU-NF-13rizkyÎncă nu există evaluări
- Closed-Loop Control of DC Drives With Controlled RectifierDocument49 paginiClosed-Loop Control of DC Drives With Controlled RectifierakbarsohailshaikhÎncă nu există evaluări
- Ocw1 3 (8259)Document9 paginiOcw1 3 (8259)hemanthÎncă nu există evaluări
- BTS Power Control R10Document17 paginiBTS Power Control R10Achmad SalsabilÎncă nu există evaluări
- Service Manual: Color TelevisionDocument16 paginiService Manual: Color TelevisionYoyneer SalinasÎncă nu există evaluări
- Assignment 10: Unit 13 - Week 10Document4 paginiAssignment 10: Unit 13 - Week 10Anjali YadavÎncă nu există evaluări
- User Manual For Wireless Controller HAMA SCORPAD 00051838 PS3Document3 paginiUser Manual For Wireless Controller HAMA SCORPAD 00051838 PS3Victor GheorgheÎncă nu există evaluări
- SM Ami-208mc (E)Document18 paginiSM Ami-208mc (E)DanielaCostaÎncă nu există evaluări
- MB Manual b560-Aorus-pro-Ax 1001 eDocument52 paginiMB Manual b560-Aorus-pro-Ax 1001 eGerson Sérgio MavieÎncă nu există evaluări
- Design Toolkit SolarPV Offgrid GreenEmpowerment V2Document105 paginiDesign Toolkit SolarPV Offgrid GreenEmpowerment V2Baset laliÎncă nu există evaluări
- Reconfigurable Optical Networks Using Wss Based Roadms: Steven D. Robinson VP, Product ManagementDocument13 paginiReconfigurable Optical Networks Using Wss Based Roadms: Steven D. Robinson VP, Product ManagementHamis RamadhaniÎncă nu există evaluări
- Electrical Operation Manual: Vertical Machining CenterDocument107 paginiElectrical Operation Manual: Vertical Machining CenterHiều PhạmÎncă nu există evaluări
- RFID and GSM Based Vehicle Number Plate RecognitionDocument47 paginiRFID and GSM Based Vehicle Number Plate Recognitionvijitizer100% (2)
- NE6188CZDocument9 paginiNE6188CZhobolghaniÎncă nu există evaluări
- Kamath Pole ZeroDocument6 paginiKamath Pole ZeroVenkatesh TatikondaÎncă nu există evaluări
- B-63494EN - 01 - Fin (Dual Check Safety Ops Man)Document268 paginiB-63494EN - 01 - Fin (Dual Check Safety Ops Man)nzbradÎncă nu există evaluări
- AutosequencesDocument98 paginiAutosequencesJhonatanÎncă nu există evaluări