S-ar putea să vă placă și
- Automotive Electronic Diagnostics (Course 2)De la EverandAutomotive Electronic Diagnostics (Course 2)Evaluare: 4 din 5 stele4/5 (2)
- 128 Pid 110Document1 pagină128 Pid 110YIN YIN HTWE100% (2)
- Vehicle management computer functionsDocument10 paginiVehicle management computer functionsali100% (2)
- Suzuki Swift Sistema Direccion Asistida EPSDocument39 paginiSuzuki Swift Sistema Direccion Asistida EPSEduardomg Garage Mecanic88% (8)
- Different Types of Speed Controllers For Brushless DC Motor - A ReviewDocument10 paginiDifferent Types of Speed Controllers For Brushless DC Motor - A ReviewGJESRÎncă nu există evaluări
- Dolby Technical Guidelines 1994Document0 paginiDolby Technical Guidelines 1994Shrwanda ShrwandaÎncă nu există evaluări
- Project Report On Matlab Pulse Width ModulationDocument43 paginiProject Report On Matlab Pulse Width ModulationMohammed AlnajjarÎncă nu există evaluări
- TM 9-6115-484-14 Mep-Pu-810a/b Part 3Document494 paginiTM 9-6115-484-14 Mep-Pu-810a/b Part 3AdvocateÎncă nu există evaluări
- Development of A BLDC Motor Drive With Improved Output CharacteristicsDocument4 paginiDevelopment of A BLDC Motor Drive With Improved Output CharacteristicskurlshÎncă nu există evaluări
- OBD-II DTC Database - Body Codes (B0xxx, B3xxx)Document3 paginiOBD-II DTC Database - Body Codes (B0xxx, B3xxx)María Martz De GarcíaÎncă nu există evaluări
- Microcontroller Controlled BLDC Drive for Electric VehiclesDocument4 paginiMicrocontroller Controlled BLDC Drive for Electric VehiclesAvinash Babu KmÎncă nu există evaluări
- Post-Silicon SOC: Keywords: DFT (Design For Testability), ATPG (Automatic Test Pattern Generation)Document10 paginiPost-Silicon SOC: Keywords: DFT (Design For Testability), ATPG (Automatic Test Pattern Generation)Amena FarhatÎncă nu există evaluări
- Ortea Orion Plus 3 PhaseDocument2 paginiOrtea Orion Plus 3 PhaseReymart ManablugÎncă nu există evaluări
- Speed Control Using MatlabDocument23 paginiSpeed Control Using MatlabNidan TegarÎncă nu există evaluări
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDocument9 paginiSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalÎncă nu există evaluări
- Project Report On Robotic ArmDocument28 paginiProject Report On Robotic Armpatel ketan84% (25)
- Speed Control of DC Motor by Various MethodsDocument5 paginiSpeed Control of DC Motor by Various MethodsVIVA-TECH IJRIÎncă nu există evaluări
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Document7 paginiSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajÎncă nu există evaluări
- Solar Powered Speed Control of Brushless DC MotorDocument7 paginiSolar Powered Speed Control of Brushless DC MotorIJRASETPublicationsÎncă nu există evaluări
- Induction Motor Speed Control Using Android Application: AbstractDocument5 paginiInduction Motor Speed Control Using Android Application: AbstractrickyÎncă nu există evaluări
- PROBLEM STATEMENT FOR TEMPERATURE CONTROL OF POLYHOUSESDocument36 paginiPROBLEM STATEMENT FOR TEMPERATURE CONTROL OF POLYHOUSESAbhishek SinghÎncă nu există evaluări
- Power Electronics Lab Speed Control of DC Motor Using Pulse Width Modulation Group MembersDocument10 paginiPower Electronics Lab Speed Control of DC Motor Using Pulse Width Modulation Group MembersFaisal NiaziÎncă nu există evaluări
- Eccentric Cam Operated Semi Automatic Gear Shifting System For Two WheelerDocument8 paginiEccentric Cam Operated Semi Automatic Gear Shifting System For Two Wheelerkifle abelÎncă nu există evaluări
- Project ProposalDocument6 paginiProject Proposaloscar100% (2)
- IJ82Document5 paginiIJ82Harsh GajjarÎncă nu există evaluări
- BLDCDocument7 paginiBLDCOne SpringÎncă nu există evaluări
- Speed Control of Induction Motor Using Fuzzy LogicDocument4 paginiSpeed Control of Induction Motor Using Fuzzy LogicEditor IJRITCCÎncă nu există evaluări
- Speed Control of BLDC Motor by Using PWM TechniqueDocument7 paginiSpeed Control of BLDC Motor by Using PWM TechniquewaweeÎncă nu există evaluări
- BLDC Motor Speed Control with RPM DisplayDocument19 paginiBLDC Motor Speed Control with RPM Displays.b.v.seshagiri1407Încă nu există evaluări
- Microcontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarDocument4 paginiMicrocontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarJagdish PatankarÎncă nu există evaluări
- Jurnaallllll Inggris RevisiDocument8 paginiJurnaallllll Inggris RevisiYahya Nyanyuk EndahÎncă nu există evaluări
- BLDC Motor Speed Control ThesisDocument6 paginiBLDC Motor Speed Control ThesisSandra Long100% (2)
- Implementation of Brushless DC Motor Speed Control PDFDocument7 paginiImplementation of Brushless DC Motor Speed Control PDFDane DaneÎncă nu există evaluări
- 99_Final ManuscriptDocument6 pagini99_Final ManuscriptDEBARATI DAMÎncă nu există evaluări
- A Training Report Presented By:-Kaushik JainDocument40 paginiA Training Report Presented By:-Kaushik JainKaushik G. JainÎncă nu există evaluări
- PID Controller Design for DC-DC Converter CircuitsDocument6 paginiPID Controller Design for DC-DC Converter CircuitsannaÎncă nu există evaluări
- Comparative Study Between Pid and Fuzzy Pid Controller For Speed Control of BLDC Motor IJERTV7IS050098Document6 paginiComparative Study Between Pid and Fuzzy Pid Controller For Speed Control of BLDC Motor IJERTV7IS050098DIVYA PRASOONA CÎncă nu există evaluări
- Hardware ReportDocument4 paginiHardware ReportBhavana K sÎncă nu există evaluări
- Speed control of BLDC Motor using IPM and Micro 2812Document41 paginiSpeed control of BLDC Motor using IPM and Micro 2812subbanna100% (1)
- Speed Control of D C MOTOR Using Chopper-1308Document7 paginiSpeed Control of D C MOTOR Using Chopper-1308Moon3pellÎncă nu există evaluări
- Micrcontroller Based Cyclo Converter Using Thyristors: Fig. 1 CycloconverterDocument32 paginiMicrcontroller Based Cyclo Converter Using Thyristors: Fig. 1 Cycloconverterपंकज काळेÎncă nu există evaluări
- Speed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodDocument7 paginiSpeed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodNithyashriÎncă nu există evaluări
- Closed Loop Control For A Brushless DC Motor To RuDocument1 paginăClosed Loop Control For A Brushless DC Motor To RuscribsunilÎncă nu există evaluări
- 19 Speed PDFDocument8 pagini19 Speed PDFNur Muhammad DzikriÎncă nu există evaluări
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaDocument5 paginiSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarÎncă nu există evaluări
- Speed Control of BLDC Motor Drive For Various ApplicationsDocument6 paginiSpeed Control of BLDC Motor Drive For Various ApplicationsAnonymous izrFWiQÎncă nu există evaluări
- A Project ProposalDocument5 paginiA Project ProposalMuhammad Umer FarooqÎncă nu există evaluări
- DC Motor Speed Control Using PWMDocument14 paginiDC Motor Speed Control Using PWMVincent KorieÎncă nu există evaluări
- Speed Control of DC Motor Literature ReviewDocument5 paginiSpeed Control of DC Motor Literature Reviewea4gaa0g100% (1)
- DC Motor Speed ControlDocument24 paginiDC Motor Speed ControlSumu Talal50% (2)
- Lit ReviewDocument4 paginiLit ReviewUgwu ArinzeÎncă nu există evaluări
- Co-Simulation of BLDC Motor Commutation by Using MDocument7 paginiCo-Simulation of BLDC Motor Commutation by Using Mahurtado017Încă nu există evaluări
- Design of Electronic Speed Controller of Brushless DC Motor: Abstract-This Paper Discusses The Construction andDocument3 paginiDesign of Electronic Speed Controller of Brushless DC Motor: Abstract-This Paper Discusses The Construction andMuhammad AhsanÎncă nu există evaluări
- DC Motor Speed Control Using PID ControllerDocument7 paginiDC Motor Speed Control Using PID ControllerEditor IJTSRDÎncă nu există evaluări
- 1455166348423-MAS Operation Manual For Drivers - V0.0 - 20809 PDFDocument55 pagini1455166348423-MAS Operation Manual For Drivers - V0.0 - 20809 PDFRajesh Singh SardarÎncă nu există evaluări
- Arduino Speed Control DC Motor LabVIEWDocument4 paginiArduino Speed Control DC Motor LabVIEWFaraheddine BelkacemÎncă nu există evaluări
- Speed Control of A DC Motor Using Hand GestureDocument4 paginiSpeed Control of A DC Motor Using Hand GestureArka Prava LahiriÎncă nu există evaluări
- Content ServerDocument19 paginiContent ServerGerSon GUerra Chango IIIÎncă nu există evaluări
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pagini3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqahmetÎncă nu există evaluări
- DE Sem 6 ReportDocument26 paginiDE Sem 6 ReportKotadia ShivamÎncă nu există evaluări
- Analogue Communications ReportDocument12 paginiAnalogue Communications ReportNitesh ChaurasiyaÎncă nu există evaluări
- Synopsis PPT 4Document7 paginiSynopsis PPT 4Appu SpecialÎncă nu există evaluări
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerDocument12 paginiFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaÎncă nu există evaluări
- Speed Control of Single Phase Induction Motor Using Infrared Receiver ModuleDocument6 paginiSpeed Control of Single Phase Induction Motor Using Infrared Receiver ModuleSanjay ShelarÎncă nu există evaluări
- Wireless Speed and Direction Control of DC Motor by Using Radio Frequency TechnologyDocument6 paginiWireless Speed and Direction Control of DC Motor by Using Radio Frequency TechnologyrajivÎncă nu există evaluări
- Controlling DC Motor Using Microcontroller (PIC16F72) With PWMDocument4 paginiControlling DC Motor Using Microcontroller (PIC16F72) With PWMAkah PreciousÎncă nu există evaluări
- SdsdsdsdsdsdsdsDocument1 paginăSdsdsdsdsdsdsdsTrung TrựcÎncă nu există evaluări
- Global Positioning System - GPS CDocument46 paginiGlobal Positioning System - GPS CTrung TrựcÎncă nu există evaluări
- Chinh Sua 1Document1 paginăChinh Sua 1Trung TrựcÎncă nu există evaluări
- FGFGDocument1 paginăFGFGTrung TrựcÎncă nu există evaluări
- BTS Base Transciever Station Structure IDocument79 paginiBTS Base Transciever Station Structure ITrung TrựcÎncă nu există evaluări
- CompositionsDocument2 paginiCompositionsTrung TrựcÎncă nu există evaluări
- Celltowerantennas 141213082821 Conversion Gate01Document32 paginiCelltowerantennas 141213082821 Conversion Gate01goodoo27Încă nu există evaluări
- Be late = đi trễ (không dùng "go to late" nha em) Imagine = tưởng tượng Should have = Đáng lẽ đã Document1 pagină Be late = đi trễ (không dùng "go to late" nha em) Imagine = tưởng tượng Should have = Đáng lẽ đã Trung TrựcÎncă nu există evaluări
- Temperature ControllersDocument43 paginiTemperature Controllersthulinh12a1100% (1)
- Expanding Rural Cellular Networks With Virtual Coverage: Kurtis Heimerl Joshua Blumenstock Kashif AliDocument87 paginiExpanding Rural Cellular Networks With Virtual Coverage: Kurtis Heimerl Joshua Blumenstock Kashif AliTrung TrựcÎncă nu există evaluări
- Grammar Notes B.editEDDocument9 paginiGrammar Notes B.editEDTrung TrựcÎncă nu există evaluări
- Composite DrawingDocument1 paginăComposite DrawingTrung TrựcÎncă nu există evaluări
- CompositionsDocument2 paginiCompositionsTrung TrựcÎncă nu există evaluări
- Lap Trinh PLC DK He Thong ATSDocument49 paginiLap Trinh PLC DK He Thong ATSTrung TrựcÎncă nu există evaluări
- Role DongDocument2 paginiRole DongTrung TrựcÎncă nu există evaluări
- Presentation - PDF (Bt Bộ Đề Thi)Document28 paginiPresentation - PDF (Bt Bộ Đề Thi)Trung TrựcÎncă nu există evaluări
- BLDC Motor Control ANfpgaDocument8 paginiBLDC Motor Control ANfpgasraamu2k55068100% (1)
- DC Motor Speed Control With PIC16F877A and CCS PIC C CompilerDocument3 paginiDC Motor Speed Control With PIC16F877A and CCS PIC C CompilerTrung TrựcÎncă nu există evaluări
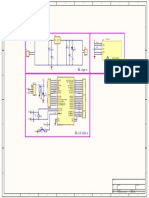
- Khối nguồn Khối hiển thị: 7805 LCD16x2ADocument1 paginăKhối nguồn Khối hiển thị: 7805 LCD16x2ATrung Trực100% (2)
- 9 - Implementation and Study of BLDC Motor Drive SystemDocument8 pagini9 - Implementation and Study of BLDC Motor Drive SystemTrung TrựcÎncă nu există evaluări
- Moteur Brushless ProDocument42 paginiMoteur Brushless ProSaad EssahliÎncă nu există evaluări
- Moteur Brushless ProDocument42 paginiMoteur Brushless ProSaad EssahliÎncă nu există evaluări
- New Text DocumentDocument1 paginăNew Text DocumentTrung TrựcÎncă nu există evaluări
- User Manual For Speed Control of BLDC Motor Using DspicDocument12 paginiUser Manual For Speed Control of BLDC Motor Using DspicTrung TrựcÎncă nu există evaluări
- Simulation Development of Microcontroller Based Triggering Circuit Using Proteus SoftwareDocument4 paginiSimulation Development of Microcontroller Based Triggering Circuit Using Proteus SoftwareVincent RonaldoÎncă nu există evaluări
- Lighting Lighting: Cleanroom LED CR250B - Uniform, Reliable, Value-For-Money SolutionDocument7 paginiLighting Lighting: Cleanroom LED CR250B - Uniform, Reliable, Value-For-Money SolutionBinoÎncă nu există evaluări
- Ce Schneider lc1d09Document4 paginiCe Schneider lc1d09Tushar PanjwaniÎncă nu există evaluări
- Connexium: Tcsesm Managed Switch Installation ManualDocument40 paginiConnexium: Tcsesm Managed Switch Installation Manualgroup nishÎncă nu există evaluări
- CV - Alberto Pérez González - EngDocument2 paginiCV - Alberto Pérez González - EngAlberto Pérez GonzálezÎncă nu există evaluări
- CMMT-AS Manual 2023-11l 8204518g1-7Document1 paginăCMMT-AS Manual 2023-11l 8204518g1-7Ismail AliÎncă nu există evaluări
- Eaton 93PM 80-100kW UPS Technical SpecificationDocument5 paginiEaton 93PM 80-100kW UPS Technical SpecificationFlorin MÎncă nu există evaluări
- NA Unit-IIDocument44 paginiNA Unit-IIvijayalakshmiv VEMURIÎncă nu există evaluări
- CMP Motors CatalogueDocument54 paginiCMP Motors CatalogueMuhammad HanafiÎncă nu există evaluări
- Reflecting on STEM ExhibitsDocument5 paginiReflecting on STEM ExhibitsJohn Rick JuanÎncă nu există evaluări
- Installation & Maintenance Instructions: Im-Ind-536985-Revaa-Sec1Document9 paginiInstallation & Maintenance Instructions: Im-Ind-536985-Revaa-Sec1Santiago JuradoÎncă nu există evaluări
- GEW Method Statement PDFDocument2 paginiGEW Method Statement PDFAzhar MushtaqÎncă nu există evaluări
- Roland cm500Document50 paginiRoland cm500Rafael RochaÎncă nu există evaluări
- Electrolux Ewm10931 (Tc1-Tc2-Tc3)Document79 paginiElectrolux Ewm10931 (Tc1-Tc2-Tc3)atomo333100% (1)
- Emr 4Document39 paginiEmr 4RaulÎncă nu există evaluări
- CW HCVR5108H V2 Manual PDFDocument276 paginiCW HCVR5108H V2 Manual PDFRoblespaulÎncă nu există evaluări
- IRLI 3615 MosfetDocument8 paginiIRLI 3615 MosfetKennedy TavaresÎncă nu există evaluări
- Datasheet UHD Umbilical 39-5mm - A307667Document2 paginiDatasheet UHD Umbilical 39-5mm - A307667Tenner CorrêaÎncă nu există evaluări
- Quiz 1 - Attempt ReviewDocument15 paginiQuiz 1 - Attempt Reviewdude RohitÎncă nu există evaluări
- Yaesu Bda Ft-991Document158 paginiYaesu Bda Ft-991Dieter BalkeÎncă nu există evaluări
- Adam 4572Document74 paginiAdam 4572wilvarelÎncă nu există evaluări
- Maxtena Product Catalog 2015 LowDocument44 paginiMaxtena Product Catalog 2015 Lowbek_marsÎncă nu există evaluări