S-ar putea să vă placă și
- Expanding Rural Cellular Networks With Virtual Coverage: Kurtis Heimerl Joshua Blumenstock Kashif AliDocument87 paginiExpanding Rural Cellular Networks With Virtual Coverage: Kurtis Heimerl Joshua Blumenstock Kashif AliTrung TrựcÎncă nu există evaluări
- Global Positioning System - GPS CDocument46 paginiGlobal Positioning System - GPS CTrung TrựcÎncă nu există evaluări
- SdsdsdsdsdsdsdsDocument1 paginăSdsdsdsdsdsdsdsTrung TrựcÎncă nu există evaluări
- FGFGDocument1 paginăFGFGTrung TrựcÎncă nu există evaluări
- BTS Base Transciever Station Structure IDocument79 paginiBTS Base Transciever Station Structure ITrung TrựcÎncă nu există evaluări
- Chinh Sua 1Document1 paginăChinh Sua 1Trung TrựcÎncă nu există evaluări
- Composite DrawingDocument1 paginăComposite DrawingTrung TrựcÎncă nu există evaluări
- Grammar Notes B.editEDDocument9 paginiGrammar Notes B.editEDTrung TrựcÎncă nu există evaluări
- Celltowerantennas 141213082821 Conversion Gate01Document32 paginiCelltowerantennas 141213082821 Conversion Gate01goodoo27Încă nu există evaluări
- CompositionsDocument2 paginiCompositionsTrung TrựcÎncă nu există evaluări
- Be late = đi trễ (không dùng "go to late" nha em) Imagine = tưởng tượng Should have = Đáng lẽ đã Document1 pagină Be late = đi trễ (không dùng "go to late" nha em) Imagine = tưởng tượng Should have = Đáng lẽ đã Trung TrựcÎncă nu există evaluări
- BLDC Motor Control ANfpgaDocument8 paginiBLDC Motor Control ANfpgasraamu2k55068100% (1)
- CompositionsDocument2 paginiCompositionsTrung TrựcÎncă nu există evaluări
- Temperature ControllersDocument43 paginiTemperature Controllersthulinh12a1100% (1)
- User Manual For Speed Control of BLDC Motor Using DspicDocument12 paginiUser Manual For Speed Control of BLDC Motor Using DspicTrung TrựcÎncă nu există evaluări
- Role DongDocument2 paginiRole DongTrung TrựcÎncă nu există evaluări
- Presentation - PDF (Bt Bộ Đề Thi)Document28 paginiPresentation - PDF (Bt Bộ Đề Thi)Trung TrựcÎncă nu există evaluări
- Moteur Brushless ProDocument42 paginiMoteur Brushless ProSaad EssahliÎncă nu există evaluări
- DC Motor Speed Control With PIC16F877A and CCS PIC C CompilerDocument3 paginiDC Motor Speed Control With PIC16F877A and CCS PIC C CompilerTrung TrựcÎncă nu există evaluări
- Lap Trinh PLC DK He Thong ATSDocument49 paginiLap Trinh PLC DK He Thong ATSTrung TrựcÎncă nu există evaluări
- Variable Speed BLDC Motor Drive Using PIC MicrocontrollerDocument6 paginiVariable Speed BLDC Motor Drive Using PIC MicrocontrollerTrung TrựcÎncă nu există evaluări
- New Text DocumentDocument1 paginăNew Text DocumentTrung TrựcÎncă nu există evaluări
- Moteur Brushless ProDocument42 paginiMoteur Brushless ProSaad EssahliÎncă nu există evaluări
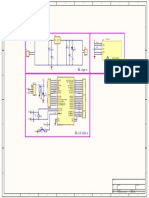
- Khối nguồn Khối hiển thị: 7805 LCD16x2ADocument1 paginăKhối nguồn Khối hiển thị: 7805 LCD16x2ATrung Trực100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Technical Service Guide: "Customcool "Document22 paginiTechnical Service Guide: "Customcool "Alicia Gabriela GutierrezÎncă nu există evaluări
- Sky Star 2 PciDocument2 paginiSky Star 2 PciSor Dela FlorÎncă nu există evaluări
- Maintenance Contract TemplateDocument7 paginiMaintenance Contract Templateabigail_tito123Încă nu există evaluări
- Toc 2Document87 paginiToc 2Zefrin ParkerÎncă nu există evaluări
- India Structured Cabling Edition 2world Market For Cabling 2017r2016 (Sample)Document5 paginiIndia Structured Cabling Edition 2world Market For Cabling 2017r2016 (Sample)federicosanchezÎncă nu există evaluări
- Verification of Dual Port RAM Using System Verilog and UVM: A ReviewDocument6 paginiVerification of Dual Port RAM Using System Verilog and UVM: A ReviewIJRASETPublicationsÎncă nu există evaluări
- Mac OS X CPU SchedulingDocument21 paginiMac OS X CPU Schedulingyeyow :v0% (2)
- JP 1030, JP 1230 PartsDocument291 paginiJP 1030, JP 1230 PartsCaroline DanielÎncă nu există evaluări
- Vyzex Pocket Pod PreferencesDocument11 paginiVyzex Pocket Pod PreferencesDaz MasonÎncă nu există evaluări
- Oda ExamDocument8 paginiOda ExamArif Mohammed Rangrezz100% (1)
- PQ ProductcatalogusDocument72 paginiPQ ProductcatalogusJohn FreackÎncă nu există evaluări
- Descargar Gratis Libro Side by Side Third EditionDocument21 paginiDescargar Gratis Libro Side by Side Third EditionMelissa Santos Canales17% (6)
- RAID Level 0 - Striping: AdvantagesDocument19 paginiRAID Level 0 - Striping: AdvantagesoakkarÎncă nu există evaluări
- Ajit Azure BookDocument59 paginiAjit Azure BookKakoli SenÎncă nu există evaluări
- STC TCL Lib Installation GuideDocument4 paginiSTC TCL Lib Installation GuideVenkatÎncă nu există evaluări
- Bdx33B Bdx33C Bdx34B Bdx34C: Complementary Silicon Power Darlington TransistorsDocument5 paginiBdx33B Bdx33C Bdx34B Bdx34C: Complementary Silicon Power Darlington TransistorsJavier BendekÎncă nu există evaluări
- T40 E41 M46 G NPB Ver.c PDFDocument51 paginiT40 E41 M46 G NPB Ver.c PDFEduardo AramburuÎncă nu există evaluări
- Variables and TypesDocument8 paginiVariables and TypesmefiestoÎncă nu există evaluări
- AWAP608HDocument2 paginiAWAP608HomerbinhussainÎncă nu există evaluări
- D T R E P L Y: Designtree Service Consultants Pvt. Ltd. Page 1 of 11Document11 paginiD T R E P L Y: Designtree Service Consultants Pvt. Ltd. Page 1 of 11waz ahmedÎncă nu există evaluări
- Bms Computer Karang Asem Timur: List Harga LaptopDocument1 paginăBms Computer Karang Asem Timur: List Harga LaptopBMS COMPUTERÎncă nu există evaluări
- Research Papers On Analog Integrated CircuitsDocument4 paginiResearch Papers On Analog Integrated Circuitsafmcmuugo100% (1)
- Lab Report FpgaDocument34 paginiLab Report FpgaMuhammad Furqan JavedÎncă nu există evaluări
- ST Micro M25P16 Serial FlashDocument40 paginiST Micro M25P16 Serial FlashAziz Maqtri100% (1)
- Geotechnical Core Drilling Tools Catalogue - NewDocument130 paginiGeotechnical Core Drilling Tools Catalogue - NewAdmir100% (1)
- MiCOM P44XDocument8 paginiMiCOM P44XMahesh YadaÎncă nu există evaluări
- Experiment On Basic Configuration of Cisco SwitchDocument3 paginiExperiment On Basic Configuration of Cisco SwitchCassandra ShafferÎncă nu există evaluări
- Mirici-155: Miniature Gigabit Ethernet Over Stm-1/Oc-3 ConverterDocument1 paginăMirici-155: Miniature Gigabit Ethernet Over Stm-1/Oc-3 Converterrafaelmartins2010Încă nu există evaluări
- Take Assessment1 15Document6 paginiTake Assessment1 15Rick CobbÎncă nu există evaluări
- NanoDiag PDFDocument8 paginiNanoDiag PDFQuarmina HesseÎncă nu există evaluări