S-ar putea să vă placă și
- Report On PC Control Using TV RemotDocument37 paginiReport On PC Control Using TV RemotKeyur Patel67% (3)
- Trbining Coursc Outlincs: CCNTRC For Lcbrning BND DcvclopmcntDocument7 paginiTrbining Coursc Outlincs: CCNTRC For Lcbrning BND DcvclopmcntOHAiTHARUÎncă nu există evaluări
- Error PentiumDocument25 paginiError PentiumYerson ZenderÎncă nu există evaluări
- Enemies Within Auto Saved)Document15 paginiEnemies Within Auto Saved)Paul HenricksonÎncă nu există evaluări
- Project Report - Study and Comparative Analysis of Special Loyalty Program Run by Telecom Operator - Vodafone - Jaipur (Raj.)Document103 paginiProject Report - Study and Comparative Analysis of Special Loyalty Program Run by Telecom Operator - Vodafone - Jaipur (Raj.)Ritesh GoyalÎncă nu există evaluări
- SprintBacklog 1002Document6 paginiSprintBacklog 1002hafizferozÎncă nu există evaluări
- UntitledDocument9 paginiUntitledKUMANA JAYASHREE.R B.Sc(CS)Încă nu există evaluări
- Get Lucky: Daft PunkDocument1 paginăGet Lucky: Daft PunkLulujam11Încă nu există evaluări
- Kufa Journal of Engineering, Vol.3, No.2, 2012Document16 paginiKufa Journal of Engineering, Vol.3, No.2, 2012Ali JaberÎncă nu există evaluări
- Vlsi Vlsi Design Dec 2020Document2 paginiVlsi Vlsi Design Dec 2020Margoob TanweerÎncă nu există evaluări
- Application Note: Relion 650 Series Circuit Breaker ControlDocument12 paginiApplication Note: Relion 650 Series Circuit Breaker ControlILBERIPUCIÎncă nu există evaluări
- AndyDocument2 paginiAndyAndy ArcillaÎncă nu există evaluări
- Dossier Side & Main LabelDocument26 paginiDossier Side & Main LabelSam RajaÎncă nu există evaluări
- Measurement of Customer Satisfaction in Banking Sector: A Study On Standard Chartered Bank KolkataDocument9 paginiMeasurement of Customer Satisfaction in Banking Sector: A Study On Standard Chartered Bank KolkataChester PunkÎncă nu există evaluări
- PANEL DB FormDocument1 paginăPANEL DB Formdoly damanikÎncă nu există evaluări
- Overture 1928 RythemDocument7 paginiOverture 1928 RythemwoontaejungÎncă nu există evaluări
- High-Speed PCB Design Guide - January 2023Document116 paginiHigh-Speed PCB Design Guide - January 2023Muzaffer NizamÎncă nu există evaluări
- Final)Document48 paginiFinal)Gyamfi Atta KwameÎncă nu există evaluări
- CATALOGO Bombas y Compresores CORKENDocument5 paginiCATALOGO Bombas y Compresores CORKENMichael UnzuetaÎncă nu există evaluări
- Lean Six Sigma Green BeltDocument7 paginiLean Six Sigma Green Beltmulpuru sai snehaÎncă nu există evaluări
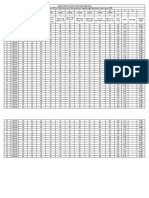
- 2 ND Sem ResultDocument12 pagini2 ND Sem ResultAman VijayvergiyaÎncă nu există evaluări
- GPRS IP Throughput Cell BSC R102 All BSC 6.7.2017Document645 paginiGPRS IP Throughput Cell BSC R102 All BSC 6.7.2017Circle RF Team AssamÎncă nu există evaluări
- 01-20 Short Message Service Cell Broadcast PDFDocument8 pagini01-20 Short Message Service Cell Broadcast PDFياسينÎncă nu există evaluări
- Online Purchase Behaviour QuestionsDocument7 paginiOnline Purchase Behaviour QuestionsCarol SiiÎncă nu există evaluări
- 6 SemDocument1 pagină6 SemPatel MihirÎncă nu există evaluări
- Chuletas Ahumadas Diagrama de FlujoDocument8 paginiChuletas Ahumadas Diagrama de Flujojesus gabrielÎncă nu există evaluări
- C 90 BDocument1 paginăC 90 BpostscriptÎncă nu există evaluări
- Jason Becker SweepsDocument2 paginiJason Becker SweepsJknoxvilÎncă nu există evaluări
- VibhorDocument1 paginăVibhorSapan SorenÎncă nu există evaluări
- Questi On No Quest Ion Type (MCQ/ Sat) CO Mapping Answer Key (For MCQ Questions Only)Document10 paginiQuesti On No Quest Ion Type (MCQ/ Sat) CO Mapping Answer Key (For MCQ Questions Only)Arman PaniÎncă nu există evaluări
- Game p1Document2 paginiGame p1Angie ChanÎncă nu există evaluări
- BCA - V and VI Sem 2021-2022 SchemaDocument19 paginiBCA - V and VI Sem 2021-2022 SchemaAniket Nsc0025Încă nu există evaluări
- Bilal Tariq 1Document2 paginiBilal Tariq 1harry9470Încă nu există evaluări
- Notice: ST SC BC-T LL 0 GBCDocument2 paginiNotice: ST SC BC-T LL 0 GBCप्रीतम सिंह तोमरÎncă nu există evaluări
- Joy To The World: For Mixed Choir (SATB) and KeyboardDocument4 paginiJoy To The World: For Mixed Choir (SATB) and KeyboardJanet Jane de RidderÎncă nu există evaluări
- L1 - L2 - FAT - Lab ExaminationDocument3 paginiL1 - L2 - FAT - Lab Examinationnupoor rajÎncă nu există evaluări
- TRBDNDNG Coursc Outldncs: CCNTRC For LCBRNDNG BND DcvclopmcntDocument7 paginiTRBDNDNG Coursc Outldncs: CCNTRC For LCBRNDNG BND DcvclopmcntOHAiTHARUÎncă nu există evaluări
- Dr. Babasaheb Ambedkar Technological UniversityDocument5 paginiDr. Babasaheb Ambedkar Technological UniversityFarooq AhmedÎncă nu există evaluări
- Block Cipher Modes of Operation and CMAC For AuthenticationDocument26 paginiBlock Cipher Modes of Operation and CMAC For AuthenticationProject Symphony Collection100% (4)
- 91 - Sem-ElectronicsC E-Jun2029Document2 pagini91 - Sem-ElectronicsC E-Jun2029SHIVANK JOSHIÎncă nu există evaluări
- DBATU Civil Engg Syllabus 2023-24Document29 paginiDBATU Civil Engg Syllabus 2023-24Panchasheela कावळेÎncă nu există evaluări
- Designer Summary Report 001Document1 paginăDesigner Summary Report 001carlosaperez4bwebgmfycÎncă nu există evaluări
- New Administrative Building, 1 Floor, A Wing, 16 Greams Road, Chennai - 600006Document12 paginiNew Administrative Building, 1 Floor, A Wing, 16 Greams Road, Chennai - 600006Vinoth Kumar SÎncă nu există evaluări
- BCA Computer Concept C Programming SEMESTER 1 ST AssignmentDocument8 paginiBCA Computer Concept C Programming SEMESTER 1 ST AssignmentBittuÎncă nu există evaluări
- Paging Strategy and Lac OptimizationDocument10 paginiPaging Strategy and Lac Optimizationkaijage kishekyaÎncă nu există evaluări
- Chapter-1: National Bank For Agriculture and Rural Developmentc NabardcccDocument60 paginiChapter-1: National Bank For Agriculture and Rural Developmentc NabardcccprathimaÎncă nu există evaluări
- Big Checksinthe Mail!Document3 paginiBig Checksinthe Mail!mymj87Încă nu există evaluări
- BookSlides 3A Data ExplorationDocument43 paginiBookSlides 3A Data ExplorationSyedul MursaleenÎncă nu există evaluări
- Final ReportDocument39 paginiFinal ReportAbhiroop DattaÎncă nu există evaluări
- २०६७ चैत्र २०६८ बैशाखDocument1 pagină२०६७ चैत्र २०६८ बैशाखAmar_ShresthaÎncă nu există evaluări
- Foundation Training Programme Phase I (FTP I) For Pos / Tos Batch 2010 (2 Weeks) SL - NO. Week DAY SessionDocument20 paginiFoundation Training Programme Phase I (FTP I) For Pos / Tos Batch 2010 (2 Weeks) SL - NO. Week DAY SessionAmit KarwasraÎncă nu există evaluări
- CompressionDocument65 paginiCompressionPaarth JohriÎncă nu există evaluări
- Plant Nutrition WorksheetsDocument8 paginiPlant Nutrition WorksheetsgraceÎncă nu există evaluări
- BookSlides 3A Data ExplorationDocument43 paginiBookSlides 3A Data ExplorationMba NaniÎncă nu există evaluări
- Valid ArDocument19 paginiValid Arpepe grilloÎncă nu există evaluări
- Math Review-Part 1Document39 paginiMath Review-Part 1LouiseÎncă nu există evaluări
- A Keleti Orvoslas FilozofiajaDocument12 paginiA Keleti Orvoslas Filozofiajazsebpap100% (1)
- A Keleti Orvoslas Filozofiaja PDFDocument12 paginiA Keleti Orvoslas Filozofiaja PDFlcsabaÎncă nu există evaluări
- Next Generation SDH/SONET: Evolution or Revolution?De la EverandNext Generation SDH/SONET: Evolution or Revolution?Evaluare: 2.5 din 5 stele2.5/5 (2)
- Strain Degradation of Saturated Clay Under Cyclic Loading: Jian Zhou and Xiaonan GongDocument5 paginiStrain Degradation of Saturated Clay Under Cyclic Loading: Jian Zhou and Xiaonan Gongtejesh reddyÎncă nu există evaluări
- O F D M (OFDM) T D: Rthogonal Requency Ivision Ultiplexing Ransceiver EsignDocument90 paginiO F D M (OFDM) T D: Rthogonal Requency Ivision Ultiplexing Ransceiver Esigntejesh reddyÎncă nu există evaluări
- Revolution 2020 - Love, Corruption, Ambition (Gnv64)Document304 paginiRevolution 2020 - Love, Corruption, Ambition (Gnv64)Prasoon Gupta70% (10)
- O F D M (OFDM) T D: Rthogonal Requency Ivision Ultiplexing Ransceiver EsignDocument90 paginiO F D M (OFDM) T D: Rthogonal Requency Ivision Ultiplexing Ransceiver Esigntejesh reddyÎncă nu există evaluări
- A Phase-Based Stereo Vision System-On-A-Chip: Javier D Iaz, Eduardo Ros, Silvio P. Sabatini, Fabio Solari, Sonia MotaDocument8 paginiA Phase-Based Stereo Vision System-On-A-Chip: Javier D Iaz, Eduardo Ros, Silvio P. Sabatini, Fabio Solari, Sonia Motatejesh reddyÎncă nu există evaluări
- Lec 6Document32 paginiLec 6tejesh reddyÎncă nu există evaluări
- UltilitiesDocument3 paginiUltilitiesThị Hiếu NguyễnÎncă nu există evaluări
- Silent Hill Promise (Reprise) TabDocument1 paginăSilent Hill Promise (Reprise) TabAdam Baylin100% (1)
- Andre Waignein - Rhapsody PianoDocument39 paginiAndre Waignein - Rhapsody PianoАртём Бубнов100% (1)
- AdvertisingDocument185 paginiAdvertisingAshu Chopra50% (2)
- Bach Cantata 147Document3 paginiBach Cantata 147Francesco Maria MoncherÎncă nu există evaluări
- A Black Diamond Novel 1 Broken Andi Jaxon English AllDocument256 paginiA Black Diamond Novel 1 Broken Andi Jaxon English AllRuth Egoavil LujanÎncă nu există evaluări
- Albeniz - Asturias Easy (+TAB)Document2 paginiAlbeniz - Asturias Easy (+TAB)Francesco MazzeraÎncă nu există evaluări
- NSI-MI - Military Radome Performance and Verification TestingDocument7 paginiNSI-MI - Military Radome Performance and Verification TestingKashif KhalilÎncă nu există evaluări
- Louie Louie Inversions FixedDocument1 paginăLouie Louie Inversions FixedRegine GarabilesÎncă nu există evaluări
- Here I Am Send MeDocument1 paginăHere I Am Send MeRodrigo Carneiro Da SilvaÎncă nu există evaluări
- Brief Overview AAS Radio SystemsDocument47 paginiBrief Overview AAS Radio SystemsJose MandrakeÎncă nu există evaluări
- 8011 Service ManualDocument135 pagini8011 Service Manualserb_71Încă nu există evaluări
- Review of Phasor Notation: Cos SinDocument15 paginiReview of Phasor Notation: Cos Siniordache0% (1)
- Comparing and Contrasting The Impact Jerzy Grotowski, Vsevolod Meyerhold and Peter Brook Have Had On The Industry.Document4 paginiComparing and Contrasting The Impact Jerzy Grotowski, Vsevolod Meyerhold and Peter Brook Have Had On The Industry.LewisjactorÎncă nu există evaluări
- 2 SonicScope Schlumberger PDFDocument19 pagini2 SonicScope Schlumberger PDFner68Încă nu există evaluări
- Ascent Final Report V2-Satellite LaunchDocument146 paginiAscent Final Report V2-Satellite LaunchDavid KhimÎncă nu există evaluări
- SG SP85 BR v11 WebDocument3 paginiSG SP85 BR v11 WebSantosh KengaleÎncă nu există evaluări
- WO 5800 - 1N 1.0 User Guide PDFDocument164 paginiWO 5800 - 1N 1.0 User Guide PDFMauricio Pelé50% (2)
- Movie Review: Ada Apa Dengan Cinta: OrientationDocument1 paginăMovie Review: Ada Apa Dengan Cinta: OrientationTanti AridipaÎncă nu există evaluări
- G. v. Iyer - WikipediaDocument5 paginiG. v. Iyer - WikipediaAnonymous PqxjViUtDtÎncă nu există evaluări
- Stan MamamooDocument67 paginiStan MamamooHans Adrielle Cruz SantosÎncă nu există evaluări
- Lost All Seasons 720p Torrent PDFDocument2 paginiLost All Seasons 720p Torrent PDFHeroe Wsg CassaÎncă nu există evaluări
- Tip Start & DASDocument34 paginiTip Start & DAScarsoÎncă nu există evaluări
- D-26-N 430-450 MHZ Amplifier: SpecificationsDocument3 paginiD-26-N 430-450 MHZ Amplifier: SpecificationsjoseÎncă nu există evaluări
- A Wideband Varactor-Tuned Microstrip VCODocument5 paginiA Wideband Varactor-Tuned Microstrip VCObaymanÎncă nu există evaluări
- 1 DistressDocument2 pagini1 DistressAlin PieÎncă nu există evaluări
- Cortez-STM22 Waves Problem SetDocument2 paginiCortez-STM22 Waves Problem SetSamantha MercadoÎncă nu există evaluări
- 03 Rhythmic Vocabulary PDFDocument33 pagini03 Rhythmic Vocabulary PDFFrancis MaldonadoÎncă nu există evaluări
- FWM603X MP3 Mini Hi-Fi System FWM603Document34 paginiFWM603X MP3 Mini Hi-Fi System FWM603Dener SouEuÎncă nu există evaluări