S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- NCH 2369 InglésDocument131 paginiNCH 2369 InglésGonzalo Labbé KöhlerÎncă nu există evaluări
- Flender Manual GeneralDocument42 paginiFlender Manual GeneralYenny LaraÎncă nu există evaluări
- General Description Product Summary: 30V P-Channel MOSFETDocument5 paginiGeneral Description Product Summary: 30V P-Channel MOSFETKarlita GaspitoÎncă nu există evaluări
- General Description Product Summary: 30V P-Channel MOSFETDocument5 paginiGeneral Description Product Summary: 30V P-Channel MOSFETKarlita GaspitoÎncă nu există evaluări
- Manual Carro GolfDocument2 paginiManual Carro GolfKarlita GaspitoÎncă nu există evaluări
- Sujet 1Document25 paginiSujet 1Karlita GaspitoÎncă nu există evaluări
- Module 3 Final Interview.: Make Small TalkDocument3 paginiModule 3 Final Interview.: Make Small TalkKarlita GaspitoÎncă nu există evaluări
- Irg 4 PC 50 WDocument9 paginiIrg 4 PC 50 WKarlita GaspitoÎncă nu există evaluări
- Title Designed by Revision Page 1 of 1Document1 paginăTitle Designed by Revision Page 1 of 1Karlita GaspitoÎncă nu există evaluări
- 54LS32/DM54LS32/DM74LS32 Quad 2-Input OR Gates: General Description FeaturesDocument7 pagini54LS32/DM54LS32/DM74LS32 Quad 2-Input OR Gates: General Description FeaturesKarlita GaspitoÎncă nu există evaluări
- F & M Act 1967 and Regulations For Steam Boilers PDFDocument19 paginiF & M Act 1967 and Regulations For Steam Boilers PDFأمير حارثÎncă nu există evaluări
- Transmission atDocument47 paginiTransmission atDidier ÁlvarezÎncă nu există evaluări
- Experiment No. 6: To Determine The Load Point Deflection of A Simply Supported Beam Subjected To An Eccentric LoadDocument11 paginiExperiment No. 6: To Determine The Load Point Deflection of A Simply Supported Beam Subjected To An Eccentric LoadMahrukh ChaudharyÎncă nu există evaluări
- Domestic Commercial EngDocument56 paginiDomestic Commercial EngDana LoreÎncă nu există evaluări
- Lecture Notes - Forging CalculationDocument21 paginiLecture Notes - Forging CalculationFabiano, Jr. BarcenalÎncă nu există evaluări
- General Physics - Worksheet II (2024)Document3 paginiGeneral Physics - Worksheet II (2024)merrymesfin87Încă nu există evaluări
- Main Relief ValveDocument2 paginiMain Relief ValveJesseÎncă nu există evaluări
- Bell B40DDocument15 paginiBell B40DAndy LiputoÎncă nu există evaluări
- Halton TsaDocument9 paginiHalton TsaNetri KrisztiánÎncă nu există evaluări
- Cimento Nacional Lda Basic Maintenance Programme: Bucket Elevator, Flexible CouplingDocument4 paginiCimento Nacional Lda Basic Maintenance Programme: Bucket Elevator, Flexible Couplingshani5573Încă nu există evaluări
- Katalog PROFLUID OIL AND GASDocument16 paginiKatalog PROFLUID OIL AND GASGigiÎncă nu există evaluări
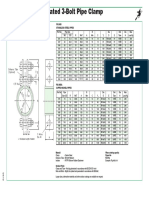
- C&P WITCHLINER Insulated 3-Bolt Pipe ClampDocument1 paginăC&P WITCHLINER Insulated 3-Bolt Pipe ClampAchraf BoudayaÎncă nu există evaluări
- Combination Meter Analog Type Soluna ViosDocument1 paginăCombination Meter Analog Type Soluna ViosKiki PriantoÎncă nu există evaluări
- Physics Spectrum December 2015 PDFDocument100 paginiPhysics Spectrum December 2015 PDFParvinder BhardwajÎncă nu există evaluări
- Preliminary Problems: 1 MechanicsDocument12 paginiPreliminary Problems: 1 MechanicsRandomÎncă nu există evaluări
- AGRE IndustrialPistons Leaflet en LRDocument20 paginiAGRE IndustrialPistons Leaflet en LRmogwai71Încă nu există evaluări
- 2014 Automatic V11 Ecat 4 - IMPORTS PDFDocument414 pagini2014 Automatic V11 Ecat 4 - IMPORTS PDFIndah KomalasariÎncă nu există evaluări
- CL Vibration ClampDocument2 paginiCL Vibration ClampEduardo RodriguezÎncă nu există evaluări
- Meherwan P Boyce - Gas Turbine Engineering Handbook-Elsevier Butterworth-Heinemann (2012) 7Document5 paginiMeherwan P Boyce - Gas Turbine Engineering Handbook-Elsevier Butterworth-Heinemann (2012) 7amir moniriÎncă nu există evaluări
- RODAMIENTOS NSK BDocument296 paginiRODAMIENTOS NSK BFredy Hernan Sam ChocÎncă nu există evaluări
- Gravity As A Form of AccelerationDocument8 paginiGravity As A Form of AccelerationJ_BellineÎncă nu există evaluări
- 11 - Chemical ThermodynamicsDocument55 pagini11 - Chemical ThermodynamicsGebre Tensay100% (1)
- Post Forming Heat TreatmentDocument7 paginiPost Forming Heat Treatmentsunsrin100% (1)
- Engine-Mounted Air Compressors (LEBW0007-01)Document16 paginiEngine-Mounted Air Compressors (LEBW0007-01)Djebali MouradÎncă nu există evaluări
- Fab - Y-Strainers - 2nd EditionDocument15 paginiFab - Y-Strainers - 2nd EditionRichard V. Quispe CastillonÎncă nu există evaluări
- Horizontal Steam Autoclave: Main FeaturesDocument2 paginiHorizontal Steam Autoclave: Main FeaturesMahroelÎncă nu există evaluări
- Axial Piston Pump Cradle BearingsDocument2 paginiAxial Piston Pump Cradle BearingsMichael Zhang100% (1)