S-ar putea să vă placă și
- Dual Stepper Motor Driver: General Description Package OutlineDocument10 paginiDual Stepper Motor Driver: General Description Package OutlineassimilatÎncă nu există evaluări
- NJM3770A: Stepper Motor DriverDocument10 paginiNJM3770A: Stepper Motor DriverDmitryÎncă nu există evaluări
- Monkmakesduino Arduino Compatible Board SchematicDocument1 paginăMonkmakesduino Arduino Compatible Board SchematicWagner Gómez100% (1)
- Atmega328 Based Circuit Diagram of The ProjectDocument1 paginăAtmega328 Based Circuit Diagram of The ProjectKav Mav100% (2)
- Rys 8833Document12 paginiRys 8833Kherbiche YounesÎncă nu există evaluări
- Schematic - POWER BANKDocument1 paginăSchematic - POWER BANKUjang Priyanto100% (1)
- Dual Differential Comparators: Features DescriptionDocument29 paginiDual Differential Comparators: Features Descriptionalllim88Încă nu există evaluări
- TWDB SchematicDocument1 paginăTWDB Schematicpm6041141100% (1)
- U1A LME49720 J3 +/-12 V IN: Title: in Hi-ZDocument1 paginăU1A LME49720 J3 +/-12 V IN: Title: in Hi-ZArmando CedeñoÎncă nu există evaluări
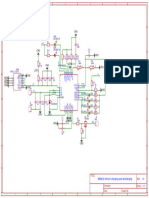
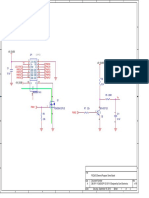
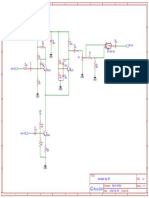
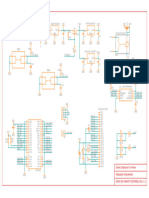
- 555 A4988 SCHDocument1 pagină555 A4988 SCHionut8312Încă nu există evaluări
- LM358 DatasheetDocument34 paginiLM358 DatasheetMai EsamÎncă nu există evaluări
- Mesa Boogie Dual Rectifier 2 Channel Preamp Emulator: Circuit by Trueval, PCB Layout by TemolDocument7 paginiMesa Boogie Dual Rectifier 2 Channel Preamp Emulator: Circuit by Trueval, PCB Layout by TemolСергей АндрияновÎncă nu există evaluări
- LayoutDocument1 paginăLayoutajib_orangeÎncă nu există evaluări
- Belimo - P-22RT - 1U00 - Installation-InstructionDocument2 paginiBelimo - P-22RT - 1U00 - Installation-InstructionAslam Abd AzizÎncă nu există evaluări
- TB62262FTG ToshibaDocument23 paginiTB62262FTG ToshibaJaqueline Valenzuela CidÎncă nu există evaluări
- Schematic Line Following Robot Line Following Robot Without MicrocontrollerDocument1 paginăSchematic Line Following Robot Line Following Robot Without Microcontrollerwibowoari100% (1)
- Cambio GiroDocument1 paginăCambio GiroLuis SosaÎncă nu există evaluări
- Pid DemoDocument1 paginăPid Demolxz5101100% (1)
- 74 HC 20Document20 pagini74 HC 20Ezequiel AriasÎncă nu există evaluări
- Dual Operational Amplifiers: Features DescriptionDocument34 paginiDual Operational Amplifiers: Features DescriptionMario Sernaque RumicheÎncă nu există evaluări
- Schematic - 24W Stereo Hi-Fi Audio Amplifier Using TDA2616 + PCB - 2021Document1 paginăSchematic - 24W Stereo Hi-Fi Audio Amplifier Using TDA2616 + PCB - 2021Antonieta Cano CruzÎncă nu există evaluări
- GPS1.0 SCHDocument1 paginăGPS1.0 SCHMukhiturrusda100% (2)
- Ir2153 Inversor EsquemaDocument1 paginăIr2153 Inversor EsquemaLuisa AmbrosÎncă nu există evaluări
- R1 200K R2 1K C1 0.1uf C2 P1 P2: Audioanalyzer V2.0Document1 paginăR1 200K R2 1K C1 0.1uf C2 P1 P2: Audioanalyzer V2.0joxÎncă nu există evaluări
- Sky65171-11: 1930 - 1990 MHZ, 0.5 W High Power Power AmplifierDocument10 paginiSky65171-11: 1930 - 1990 MHZ, 0.5 W High Power Power AmplifiercopslockÎncă nu există evaluări
- IC2 JP3 9V V+: 10/19/2023 9:18 PM C:/Users/ASUS/Downloads/sams/08 - Samsul Ma'arif - Percobaan 1.sch (Sheet: 1/1)Document5 paginiIC2 JP3 9V V+: 10/19/2023 9:18 PM C:/Users/ASUS/Downloads/sams/08 - Samsul Ma'arif - Percobaan 1.sch (Sheet: 1/1)dionsamsul765Încă nu există evaluări
- U1 P-LDR H-I2C Power: LCD - Sda LCD - SCLDocument1 paginăU1 P-LDR H-I2C Power: LCD - Sda LCD - SCLTrần Hoàng100% (1)
- DOC001036114Document1 paginăDOC001036114Luis JimenezÎncă nu există evaluări
- Schematic - AVR Colour LCD Tester - LCR TC1 - 20180912214500 PDFDocument1 paginăSchematic - AVR Colour LCD Tester - LCR TC1 - 20180912214500 PDFanshumantech anshumantech0% (1)
- PR11 Schematic V2Document1 paginăPR11 Schematic V2siti syahirah100% (1)
- Schematic New Sentinel 2024-02-16Document1 paginăSchematic New Sentinel 2024-02-16Khánh TrịnhÎncă nu există evaluări
- Schematic - Shield Arduino - 2023-05-08 PDFDocument1 paginăSchematic - Shield Arduino - 2023-05-08 PDFLeonardo PérezÎncă nu există evaluări
- Schematic - MP2639 Lithium Charging and Discharging - 2020-05-15 - 14-29-38Document1 paginăSchematic - MP2639 Lithium Charging and Discharging - 2020-05-15 - 14-29-38Colin HwangÎncă nu există evaluări
- HHO GeneratorDocument1 paginăHHO GeneratorHong Quan Hoang100% (1)
- SURE DB-DP11112 - SCH-розблокованоDocument4 paginiSURE DB-DP11112 - SCH-розблокованоВиталий БеспаловÎncă nu există evaluări
- Schematic Gerador 2022-04-09Document1 paginăSchematic Gerador 2022-04-09Карлос ГорбачÎncă nu există evaluări
- Schematic Hand+Gesture+Car+Tx 2021-04-17Document1 paginăSchematic Hand+Gesture+Car+Tx 2021-04-17ahmed mediaÎncă nu există evaluări
- Waveshare Sound Sensor SchematicDocument1 paginăWaveshare Sound Sensor SchematicNishant Kumar KashyapÎncă nu există evaluări
- Miniaturowy Zasilacz 3,3 I 5 VDocument2 paginiMiniaturowy Zasilacz 3,3 I 5 VZygmunt SzaryÎncă nu există evaluări
- Schematic LiPoChargeProtectBoost-copy LiPoChargeProtectBoost 20190522130354Document1 paginăSchematic LiPoChargeProtectBoost-copy LiPoChargeProtectBoost 20190522130354Sandra MarkivÎncă nu există evaluări
- Schematic - Zigbee Stick 4.0 CH340CDocument1 paginăSchematic - Zigbee Stick 4.0 CH340CSergey SuloevÎncă nu există evaluări
- Osoyoo Balance Car Robot DigramDocument1 paginăOsoyoo Balance Car Robot DigramSW100% (1)
- SS4H-SD Schematic v. 1.1Document1 paginăSS4H-SD Schematic v. 1.1gigioÎncă nu există evaluări
- Arduino Stepper Motor ControlDocument1 paginăArduino Stepper Motor ControlLivake BukÎncă nu există evaluări
- Subbu DAC SE V3 SchematicsDocument1 paginăSubbu DAC SE V3 Schematicscristi289Încă nu există evaluări
- Schematic PDF - (No Variations)Document1 paginăSchematic PDF - (No Variations)Mayank chauhanÎncă nu există evaluări
- Schematic PrintsDocument1 paginăSchematic Printsthong lyÎncă nu există evaluări
- Schematic - Ticari Sistem - 2022-11-14Document1 paginăSchematic - Ticari Sistem - 2022-11-14Tuna ÖzerÎncă nu există evaluări
- ss4h-sd SchematicDocument1 paginăss4h-sd Schematic003454Încă nu există evaluări
- D D D D D D D D D D D: LM193, LM293, LM293A, LM393 LM393A, LM2903, LM2903Q Dual Differential ComparatorsDocument12 paginiD D D D D D D D D D D: LM193, LM293, LM293A, LM393 LM393A, LM2903, LM2903Q Dual Differential Comparatorsalllim88Încă nu există evaluări
- Schematic LLM393Document1 paginăSchematic LLM393Channa PrasadÎncă nu există evaluări
- LM2901, LM339/LM339A, LM3302 LM239/LM239A: Quad ComparatorDocument8 paginiLM2901, LM339/LM339A, LM3302 LM239/LM239A: Quad ComparatorWellison RodriguesÎncă nu există evaluări
- Dig Is Park SchematicDocument1 paginăDig Is Park SchematicNoor HadiÎncă nu există evaluări
- DGFFGDocument1 paginăDGFFGSachin RathoreÎncă nu există evaluări
- SCH PDFDocument1 paginăSCH PDFFran CortesÎncă nu există evaluări
- 22/02/2019 8:32:08 CH C:/Users/Phamhung/Documents/Eagle/Pwm Charge/Untitled - SCH (Sheet: 1/1)Document1 pagină22/02/2019 8:32:08 CH C:/Users/Phamhung/Documents/Eagle/Pwm Charge/Untitled - SCH (Sheet: 1/1)Fran CortesÎncă nu există evaluări
- SCH PDFDocument1 paginăSCH PDFcharanÎncă nu există evaluări
- Sky65170-11: 860 - 900 MHZ, 0.5 W High Power Power AmplifierDocument10 paginiSky65170-11: 860 - 900 MHZ, 0.5 W High Power Power AmplifiercopslockÎncă nu există evaluări
- Schematic - Heart Attack Prevention System - 2023!06!24Document1 paginăSchematic - Heart Attack Prevention System - 2023!06!24Sagnik BhowmikÎncă nu există evaluări
- DCR-DVD508 AdjDocument71 paginiDCR-DVD508 AdjsilictronicÎncă nu există evaluări
- Sony CCD TRV 318 V AdjDocument54 paginiSony CCD TRV 318 V AdjsilictronicÎncă nu există evaluări
- Service Manual: CVX-V1/V1PDocument8 paginiService Manual: CVX-V1/V1PsilictronicÎncă nu există evaluări
- Sony DCR-DVD403DVD403EDocument126 paginiSony DCR-DVD403DVD403EsilictronicÎncă nu există evaluări
- Service Manual: CVX-V3/V3PDocument9 paginiService Manual: CVX-V3/V3PsilictronicÎncă nu există evaluări
- CM6500UN DatasheetDocument20 paginiCM6500UN Datasheetcarlosjamal950% (1)
- Playstation SCPH-100 - 5th-EditionDocument32 paginiPlaystation SCPH-100 - 5th-EditionsilictronicÎncă nu există evaluări
- Auto-ADJ: Section 6 AdjustmentsDocument39 paginiAuto-ADJ: Section 6 AdjustmentssilictronicÎncă nu există evaluări
- Upo111 RTDocument24 paginiUpo111 RTsilictronicÎncă nu există evaluări
- Elektor 1982 12Document61 paginiElektor 1982 12silictronicÎncă nu există evaluări
- SWR 3 Binder12Document2 paginiSWR 3 Binder12javier258Încă nu există evaluări
- SERVICE MANUAL TUBE SEALER Model SE250Document38 paginiSERVICE MANUAL TUBE SEALER Model SE250silictronic100% (1)
- Mini Speed Dome Camera: InstructionDocument33 paginiMini Speed Dome Camera: InstructionParrales GonzaloÎncă nu există evaluări
- Sony HDW-F900 Maintenance Manual Part 2 Volume 1 1ST Edition Revised-2 (9-968-563-03)Document262 paginiSony HDW-F900 Maintenance Manual Part 2 Volume 1 1ST Edition Revised-2 (9-968-563-03)silictronicÎncă nu există evaluări
- Section 5 Parts List: Safety PrecautionDocument2 paginiSection 5 Parts List: Safety PrecautionsilictronicÎncă nu există evaluări
- HDV / SD CF Card Video RecorderDocument29 paginiHDV / SD CF Card Video RecordersilictronicÎncă nu există evaluări
- Service Manual: GR-D270US, GR-D271US, GR-D275US, GR-D290US, GR-D295USDocument2 paginiService Manual: GR-D270US, GR-D271US, GR-D275US, GR-D290US, GR-D295USsilictronicÎncă nu există evaluări
- JVC GR-DF450US - PartDocument19 paginiJVC GR-DF450US - PartsilictronicÎncă nu există evaluări
- Section 5 Parts List: Safety PrecautionDocument20 paginiSection 5 Parts List: Safety PrecautionsilictronicÎncă nu există evaluări
- Video Technical Guide: GR-AXM700U/AXM500EK/AXM870SDocument89 paginiVideo Technical Guide: GR-AXM700U/AXM500EK/AXM870SsilictronicÎncă nu există evaluări
- Safety Precaution: Parts ListDocument18 paginiSafety Precaution: Parts ListsilictronicÎncă nu există evaluări
- PowerShot A95Document21 paginiPowerShot A95silictronicÎncă nu există evaluări
- Polaris: Farm EkDocument34 paginiPolaris: Farm EksilictronicÎncă nu există evaluări
- Instruction Manual: General-Purpose InverterDocument74 paginiInstruction Manual: General-Purpose Inverteranhthong3k100% (2)
- Polaris: Farm EkDocument34 paginiPolaris: Farm EksilictronicÎncă nu există evaluări
- PQ05TZ51 DatasheetDocument8 paginiPQ05TZ51 DatasheetsilictronicÎncă nu există evaluări
- AG-DVC15P... Error CodesDocument1 paginăAG-DVC15P... Error CodessilictronicÎncă nu există evaluări
- 22 Schematic Diagrams: Ac Adaptor (Pv-Dac12-A) : 22.1. Main/Sub Schematic DiagramDocument4 pagini22 Schematic Diagrams: Ac Adaptor (Pv-Dac12-A) : 22.1. Main/Sub Schematic DiagramsilictronicÎncă nu există evaluări
- PQ05TZ51 DatasheetDocument8 paginiPQ05TZ51 DatasheetsilictronicÎncă nu există evaluări
- Sony DHR-1000 Ver 1.0 - Siuplement-1Document4 paginiSony DHR-1000 Ver 1.0 - Siuplement-1silictronicÎncă nu există evaluări
- Jet Airways Web Booking ETicket (YFHOWT) - Puthiya VeetilDocument3 paginiJet Airways Web Booking ETicket (YFHOWT) - Puthiya VeetilpetrishiaÎncă nu există evaluări
- Article by NSHIMIYIMANA GASTON & GERMAINDocument12 paginiArticle by NSHIMIYIMANA GASTON & GERMAINngaston2020Încă nu există evaluări
- Transistor DesignDocument51 paginiTransistor DesignJohn GentileÎncă nu există evaluări
- Sinfar, Surveying AssignmentDocument81 paginiSinfar, Surveying Assignmentmuhammathusinfar01Încă nu există evaluări
- 1.2D Viewing TransformationsDocument127 pagini1.2D Viewing TransformationsAbhigyan HarshaÎncă nu există evaluări
- The Color WheelDocument33 paginiThe Color WheeldetÎncă nu există evaluări
- Advantages and Disadvantages of Machine Learning LanguageDocument2 paginiAdvantages and Disadvantages of Machine Learning LanguagemansiÎncă nu există evaluări
- Store ManagerDocument2 paginiStore Managerapi-78933101Încă nu există evaluări
- CCNPv7 TSHOOT Lab4 2 Mixed Layer 2 3 Connectivity StudentDocument13 paginiCCNPv7 TSHOOT Lab4 2 Mixed Layer 2 3 Connectivity StudentPeter Ndungu0% (2)
- Red Hat Enterprise Linux-7-Virtualization Deployment and Administration Guide-en-US PDFDocument551 paginiRed Hat Enterprise Linux-7-Virtualization Deployment and Administration Guide-en-US PDFRomain KoffiÎncă nu există evaluări
- Aaruhi Institute ProfileDocument30 paginiAaruhi Institute ProfileYADURAJ DJÎncă nu există evaluări
- Audit Work Program (500 Club Asia)Document4 paginiAudit Work Program (500 Club Asia)tineÎncă nu există evaluări
- Hack FB Online) 2 Minutes Using Our Site #WL5P2Rw7A7Document4 paginiHack FB Online) 2 Minutes Using Our Site #WL5P2Rw7A7Jhon Dave SarmientoÎncă nu există evaluări
- PDFDocument16 paginiPDFGaurav PatilÎncă nu există evaluări
- Docebo All in On AI Your Guide To Artificial Intelligence in LDDocument20 paginiDocebo All in On AI Your Guide To Artificial Intelligence in LDHager Hamdy100% (1)
- Austin Strickland ResumeDocument1 paginăAustin Strickland ResumeAustinÎncă nu există evaluări
- Stream CipherDocument214 paginiStream CipherAyush TibrewalaÎncă nu există evaluări
- Common Source Amplifier PDFDocument2 paginiCommon Source Amplifier PDFJennifer0% (1)
- HcnpdocxDocument137 paginiHcnpdocxbaccari taoufikÎncă nu există evaluări
- Dean of Industry Interface JDDocument3 paginiDean of Industry Interface JDKrushnasamy SuramaniyanÎncă nu există evaluări
- IoT Based Health Monitoring System@Document17 paginiIoT Based Health Monitoring System@atikpÎncă nu există evaluări
- Online Dictionaries Today and TomorrowDocument16 paginiOnline Dictionaries Today and TomorrowGuillermo GonzálezÎncă nu există evaluări
- CEED Training AssignmentDocument1 paginăCEED Training AssignmentBing WangÎncă nu există evaluări
- Datasheet IFP9850-3Document2 paginiDatasheet IFP9850-3jaiat22Încă nu există evaluări
- C++11 Is A Version of The Standard For The ProgrammingDocument56 paginiC++11 Is A Version of The Standard For The ProgrammingYvzÎncă nu există evaluări
- PPAP IV Edition TrainingDocument38 paginiPPAP IV Edition Trainingshariq warsi100% (1)
- Bölümlere Göre Ki̇tap Li̇stesi̇Document94 paginiBölümlere Göre Ki̇tap Li̇stesi̇NanaNanaÎncă nu există evaluări
- Windloads On Offshore StructuresDocument16 paginiWindloads On Offshore StructureschbeggyÎncă nu există evaluări
- The Design and Construction of An Electric Bicycle PDFDocument70 paginiThe Design and Construction of An Electric Bicycle PDFJessah Mae E. Reyes43% (7)
- Assessment Guideline July 2021Document10 paginiAssessment Guideline July 2021Seminar Group09Încă nu există evaluări