S-ar putea să vă placă și
- 2 DOF Articulated Pen Plotter BlogDocument19 pagini2 DOF Articulated Pen Plotter BlogAnonymous JNquk43qÎncă nu există evaluări
- Scara RobotDocument13 paginiScara RobotMuhammad Ikhsan Al-fatihÎncă nu există evaluări
- 00 Robotics F16MTE PLO CLO IntroductionDocument14 pagini00 Robotics F16MTE PLO CLO IntroductionasadÎncă nu există evaluări
- Beckhoff PC ControlDocument62 paginiBeckhoff PC ControlGökhan YıldızÎncă nu există evaluări
- Final Year Project Report Robotic ArmDocument11 paginiFinal Year Project Report Robotic ArmAmr ElsakkaÎncă nu există evaluări
- Study Guide Mechatronics PDFDocument24 paginiStudy Guide Mechatronics PDFGhassan MansourÎncă nu există evaluări
- Advanced Robotics PDFDocument47 paginiAdvanced Robotics PDFAubs ChomaÎncă nu există evaluări
- Application of Industrial RobotsDocument13 paginiApplication of Industrial RobotsAvinash YewaleÎncă nu există evaluări
- Microsoft Robotics: Ryan Fernandes Pranoti Barge Kaustubh Gage Vaikunth BhandareDocument15 paginiMicrosoft Robotics: Ryan Fernandes Pranoti Barge Kaustubh Gage Vaikunth BhandareVaikunth BhandareÎncă nu există evaluări
- ScaraDocument7 paginiScaraAnand Kumar MishraÎncă nu există evaluări
- Kinematics Modeling and Simulation of SCARA Robot ArmDocument6 paginiKinematics Modeling and Simulation of SCARA Robot ArmIjmret JournalÎncă nu există evaluări
- UV Sanitization RobotDocument15 paginiUV Sanitization Robotvishalmate10Încă nu există evaluări
- IAT0922 Industrial Robotics Chapter2 Rev4Document79 paginiIAT0922 Industrial Robotics Chapter2 Rev4visionÎncă nu există evaluări
- 6servo Robot Arm EngDocument18 pagini6servo Robot Arm EngĐỗ ThànhÎncă nu există evaluări
- Interfacing MATLAB and ROS PDFDocument17 paginiInterfacing MATLAB and ROS PDFluis quitianÎncă nu există evaluări
- IEEE Paper Presentation On Autonomous RoboticsDocument13 paginiIEEE Paper Presentation On Autonomous Roboticspulkit2440Încă nu există evaluări
- Design and Fabrication of Wheel Chair Using Rocker Bogie MechanismDocument4 paginiDesign and Fabrication of Wheel Chair Using Rocker Bogie MechanismEditor IJTSRDÎncă nu există evaluări
- Manipulator KinematicsDocument61 paginiManipulator KinematicsHoang Minh ThangÎncă nu există evaluări
- Abstract For Robotic ArmDocument4 paginiAbstract For Robotic ArmRounak VyasÎncă nu există evaluări
- Intro2robotics PPT SMRDocument48 paginiIntro2robotics PPT SMRapi-115728880Încă nu există evaluări
- Me6702 Mechatronics Unit 4Document23 paginiMe6702 Mechatronics Unit 4Niyas AhamedÎncă nu există evaluări
- Sliding Mode Observers Tutorial PDFDocument3 paginiSliding Mode Observers Tutorial PDFVicente Borja JaimesÎncă nu există evaluări
- Industrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeDocument73 paginiIndustrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeSiddharth Gupta0% (1)
- Matlab For SolidworksDocument18 paginiMatlab For SolidworksAle' AmoudiÎncă nu există evaluări
- Robot SimulationDocument13 paginiRobot SimulationAmeya VirkudÎncă nu există evaluări
- EncoderDocument44 paginiEncoderdaiduongxanh14113Încă nu există evaluări
- Introduction To Robot SoccerDocument94 paginiIntroduction To Robot Soccerdek0ne100% (1)
- RobotDocument5 paginiRobotSonal Mehir RamjununÎncă nu există evaluări
- Linear Control of ManipulatorsDocument55 paginiLinear Control of ManipulatorsXuân HoằngÎncă nu există evaluări
- Robotic Sensors: Robot Actuators - Different TypesDocument4 paginiRobotic Sensors: Robot Actuators - Different Typesmohan_rapaka100% (1)
- Everything You Ever Wanted To Know About Data Acquisition: Part 1 - Analog InputsDocument45 paginiEverything You Ever Wanted To Know About Data Acquisition: Part 1 - Analog InputsueidaqÎncă nu există evaluări
- Ros ComparisionDocument6 paginiRos Comparisiondogukan duranÎncă nu există evaluări
- Abb 02 RAPID Overview enDocument234 paginiAbb 02 RAPID Overview enxeratuleÎncă nu există evaluări
- Improve positioning precision of SCARA robots with compliant transmissionsDocument3 paginiImprove positioning precision of SCARA robots with compliant transmissionsChandan KanuÎncă nu există evaluări
- Oie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamceDocument48 paginiOie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamcemaniÎncă nu există evaluări
- Kinematic Modelling of RobotsDocument36 paginiKinematic Modelling of Robotsusmanali17Încă nu există evaluări
- ME407 MechatronicsDocument2 paginiME407 MechatronicsVivek SivaramanÎncă nu există evaluări
- Robotic Arm Controlled by Human Arm MovementsDocument6 paginiRobotic Arm Controlled by Human Arm MovementsSushanth KengunteÎncă nu există evaluări
- Industrial Automation 1Document41 paginiIndustrial Automation 1Chandan Chandan100% (2)
- Maab GuidelinesDocument315 paginiMaab GuidelinesVikas Patel100% (1)
- New Trends in RoboticsDocument25 paginiNew Trends in Roboticsrettore84Încă nu există evaluări
- Adaptive ControlDocument27 paginiAdaptive ControlmettayugeshreddyÎncă nu există evaluări
- 4 Degree of Freedom Robotic Arm Using Arduino Nano (Microcontroller)Document16 pagini4 Degree of Freedom Robotic Arm Using Arduino Nano (Microcontroller)Neeraj SharmaÎncă nu există evaluări
- Dynamic Mobile Robot Paper 1Document6 paginiDynamic Mobile Robot Paper 1pgamasterÎncă nu există evaluări
- SCARA Robot KinematicsDocument5 paginiSCARA Robot KinematicsPrasanth Kurapati100% (3)
- Automatic Speed Control System by The Color Sensor For Automobiles - An Innovative Model Based ApproaDocument69 paginiAutomatic Speed Control System by The Color Sensor For Automobiles - An Innovative Model Based ApproaAnil ReddyÎncă nu există evaluări
- Sigmadrive Range Manual Provisional ReleaseDocument47 paginiSigmadrive Range Manual Provisional ReleaseJanson Rojas HernándezÎncă nu există evaluări
- Lab 1-9Document36 paginiLab 1-9HassanAhmed124Încă nu există evaluări
- Denavit - Hartenberg AlgorithmDocument30 paginiDenavit - Hartenberg AlgorithmherioshkoshÎncă nu există evaluări
- Fundamentals of Lyapunov TheoryDocument9 paginiFundamentals of Lyapunov Theorygoitom01Încă nu există evaluări
- ForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFDocument11 paginiForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFAshar HaroonÎncă nu există evaluări
- Simulink Support Package For ArduinoDocument4 paginiSimulink Support Package For ArduinofredÎncă nu există evaluări
- Inverse Kinematic Control of A Prosthetic ArmDocument26 paginiInverse Kinematic Control of A Prosthetic Armodsnet100% (1)
- Robot and servo drives courseDocument2 paginiRobot and servo drives coursekarthik rajÎncă nu există evaluări
- ME 2028 ROBOTICS-Questionbank Unit1&2Document2 paginiME 2028 ROBOTICS-Questionbank Unit1&2Karthick RamÎncă nu există evaluări
- Seminar ReportDocument24 paginiSeminar ReportAnup BorseÎncă nu există evaluări
- Robot Arm Control With Arduino 3Document42 paginiRobot Arm Control With Arduino 3Tri Nguyen MinhÎncă nu există evaluări
- Automated Vehicles A Complete Guide - 2020 EditionDe la EverandAutomated Vehicles A Complete Guide - 2020 EditionÎncă nu există evaluări
- Probabilistic Robotics: SLAM: Robots Móviles UC3M Dep. de Ing. de Sistemas y AutomáticaDocument33 paginiProbabilistic Robotics: SLAM: Robots Móviles UC3M Dep. de Ing. de Sistemas y AutomáticaSara CMÎncă nu există evaluări
- GradDocument74 paginiGradMoHamedÎncă nu există evaluări
- ProjectDocument35 paginiProjectMoHamedÎncă nu există evaluări
- CNC1Document78 paginiCNC1MoHamedÎncă nu există evaluări
- 1 IntroductionDocument11 pagini1 IntroductionMoHamedÎncă nu există evaluări
- CodeDocument2 paginiCodeMoHamedÎncă nu există evaluări
- Dashboard For Analyzing SCADA Data Log: A Case Study of Urban Railway in MalaysiaDocument10 paginiDashboard For Analyzing SCADA Data Log: A Case Study of Urban Railway in MalaysiaInternational Journal of Advances in Applied Sciences (IJAAS)Încă nu există evaluări
- Reasonable Expectation of PrivacyDocument2 paginiReasonable Expectation of PrivacyAshish UpadhyayaÎncă nu există evaluări
- Releasenotes FR FRDocument9 paginiReleasenotes FR FRdadjudadju11Încă nu există evaluări
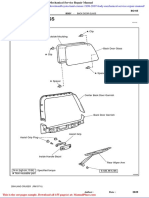
- Toyota Land Cruiser 1998 2007 Body Mechanical Service Repair ManualDocument10 paginiToyota Land Cruiser 1998 2007 Body Mechanical Service Repair Manualhector100% (47)
- Effects ManualDocument295 paginiEffects ManualAndi SuntoroÎncă nu există evaluări
- 00 CCSA TestDocument276 pagini00 CCSA TestPedro CubillaÎncă nu există evaluări
- IELTSFEVER ACADEMIC READING PRACTCIE TEST 49 PDF 1 PDFDocument11 paginiIELTSFEVER ACADEMIC READING PRACTCIE TEST 49 PDF 1 PDFŔãvî ŚødãnîÎncă nu există evaluări
- Indian Army RALLY NOTIFICATION: 2020-2021 Recruiting Office (Headquarters), BangaloreDocument11 paginiIndian Army RALLY NOTIFICATION: 2020-2021 Recruiting Office (Headquarters), BangaloreDebashis MahantaÎncă nu există evaluări
- The Old Axolotl - Hardware Dream - Jacek DukajDocument188 paginiThe Old Axolotl - Hardware Dream - Jacek Dukajferuyo100% (2)
- 21Mbps Wifi Data Card: Model No: 21.6Mw-63Document2 pagini21Mbps Wifi Data Card: Model No: 21.6Mw-63NandgulabDeshmukhÎncă nu există evaluări
- Global Manufacturing Outlook: Performance in The CrosshairsDocument36 paginiGlobal Manufacturing Outlook: Performance in The CrosshairsBackUp 02Încă nu există evaluări
- VLSI Lab Manual - Digital Cirucit Design Using VHDLDocument82 paginiVLSI Lab Manual - Digital Cirucit Design Using VHDLSakthikumar Balasundaram100% (3)
- FINAL REPORT (Uswatun Saliha)Document76 paginiFINAL REPORT (Uswatun Saliha)Uthman Lokman100% (1)
- Group 5 - Laboratory No. 5Document14 paginiGroup 5 - Laboratory No. 5Angel GonzalesÎncă nu există evaluări
- Carbon DLS™ 3D Printing Process Engineering Handbook: Updated 06.24.2022Document56 paginiCarbon DLS™ 3D Printing Process Engineering Handbook: Updated 06.24.2022JordiÎncă nu există evaluări
- UML (Unified Modeling Langauage)Document17 paginiUML (Unified Modeling Langauage)Prince BaluÎncă nu există evaluări
- Welcome To The Course Rasa14 Sociology of Law Introduction. LetterDocument2 paginiWelcome To The Course Rasa14 Sociology of Law Introduction. LettersitdevÎncă nu există evaluări
- PCS 931SDocument773 paginiPCS 931SMuhamad YasrinÎncă nu există evaluări
- CRS New Brochure 2018Document24 paginiCRS New Brochure 2018gugiÎncă nu există evaluări
- SL2100 Licensing v1.0 PDFDocument19 paginiSL2100 Licensing v1.0 PDFKHALED TAJMOUTIÎncă nu există evaluări
- ATT - 1443630574733 - ENSA Agadir Hassane Bouzahir Chapter 1 - GraphsDocument17 paginiATT - 1443630574733 - ENSA Agadir Hassane Bouzahir Chapter 1 - GraphsNouhaila BabaÎncă nu există evaluări
- Simplifying Ratios HomeworkDocument6 paginiSimplifying Ratios Homeworkafnambrcuzwdyk100% (1)
- Spare List - Caterpillar-3512: PLOT NO-103Document5 paginiSpare List - Caterpillar-3512: PLOT NO-103Balar PrakashÎncă nu există evaluări
- Wiring diagram labels and functionsDocument1 paginăWiring diagram labels and functionsAlberto RodríguezÎncă nu există evaluări
- Merford Support StatementDocument3 paginiMerford Support StatementEdison GonsalvesÎncă nu există evaluări
- Techniques and Tools For Software Analysis: Freescale SemiconductorDocument7 paginiTechniques and Tools For Software Analysis: Freescale SemiconductorjohnÎncă nu există evaluări
- Mounted Disc Plough Operator ManualDocument14 paginiMounted Disc Plough Operator ManualJunior KachikhoÎncă nu există evaluări
- UMP Training Presentation (For Participants)Document89 paginiUMP Training Presentation (For Participants)Jaylord CauanÎncă nu există evaluări
- HUAGUANG R134aDocument1 paginăHUAGUANG R134aCésar100% (1)
- Labnet Mini Microcentrifuge User Manual-0218Document8 paginiLabnet Mini Microcentrifuge User Manual-0218Gustavo MuñozÎncă nu există evaluări