S-ar putea să vă placă și
- Modelling and Advance Control Techniques For DC-DC Converter With Improve PerformanceDocument4 paginiModelling and Advance Control Techniques For DC-DC Converter With Improve PerformanceerpublicationÎncă nu există evaluări
- Ijetae 0913 69Document6 paginiIjetae 0913 69Lucian Mihai BiltiuÎncă nu există evaluări
- Analysis and Modeling of Digital Peak Current Mode ControlDocument6 paginiAnalysis and Modeling of Digital Peak Current Mode Controltinhmaixatoi2006Încă nu există evaluări
- Buck Boost ProjectDocument24 paginiBuck Boost ProjectRonald LugwireÎncă nu există evaluări
- A Novel Switch Mode DC-AC Inverter With Nonlinear Robust Control (IEEE-TIE)Document7 paginiA Novel Switch Mode DC-AC Inverter With Nonlinear Robust Control (IEEE-TIE)Al Bajad MamadÎncă nu există evaluări
- Cep PeDocument25 paginiCep PeJaveriaÎncă nu există evaluări
- Tarakanath2014IMC BoostDocument7 paginiTarakanath2014IMC BoostByron Paul CajamarcaÎncă nu există evaluări
- Quadratic - 09431104Document5 paginiQuadratic - 09431104Marcelo Flavio GuepfrihÎncă nu există evaluări
- Module1 PDFDocument19 paginiModule1 PDFSetya ArdhiÎncă nu există evaluări
- A Transformerless Buck-Boost Converter With PID ControllerDocument7 paginiA Transformerless Buck-Boost Converter With PID ControllerSohaib ChoudharyÎncă nu există evaluări
- Input-Output Linearization and Zero-Dynamics Control of Three-Phase AC/DC Voltage-Source ConvertersDocument12 paginiInput-Output Linearization and Zero-Dynamics Control of Three-Phase AC/DC Voltage-Source ConvertersAshik AhmedÎncă nu există evaluări
- Boost DC-AC Inverter: A New Control StrategyDocument11 paginiBoost DC-AC Inverter: A New Control StrategyChandan Kumar SharmaÎncă nu există evaluări
- 2008 23 6 IEEE PELS Dual PhaseshiftDocument10 pagini2008 23 6 IEEE PELS Dual PhaseshiftDEBARATI DAMÎncă nu există evaluări
- Induction Motor Control Through AC DC AC ConverterDocument7 paginiInduction Motor Control Through AC DC AC ConverterJohn CollinsÎncă nu există evaluări
- IEEE 2011 April Boost ConverterDocument16 paginiIEEE 2011 April Boost Convertersam chenÎncă nu există evaluări
- DC Motor Speed Control Using Microcontroller: AbstractDocument5 paginiDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuÎncă nu există evaluări
- 06 Chapter1Document21 pagini06 Chapter1ShenbagalakshmiÎncă nu există evaluări
- Self 4Document8 paginiSelf 4ShenbagalakshmiÎncă nu există evaluări
- Aqw PDFDocument5 paginiAqw PDFnjmnjkÎncă nu există evaluări
- AC-AC (DC Link) - B.H.KWon PDFDocument10 paginiAC-AC (DC Link) - B.H.KWon PDFBui DaiÎncă nu există evaluări
- Introduction To Electrical DrivesDocument18 paginiIntroduction To Electrical DrivesRohidah SaimunÎncă nu există evaluări
- Performance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControlDocument10 paginiPerformance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControleditorijaiemÎncă nu există evaluări
- Performance Analysis of Conventional PI Controller for DC-DC Cuk Converter Operating in Buck ModeDocument6 paginiPerformance Analysis of Conventional PI Controller for DC-DC Cuk Converter Operating in Buck ModeThiaga RajanÎncă nu există evaluări
- A Review On Controllers For PWM Inverters: S. M. Ayob, N. A. Azli and Z. SalamDocument5 paginiA Review On Controllers For PWM Inverters: S. M. Ayob, N. A. Azli and Z. Salamfaisal hÎncă nu există evaluări
- Closed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLABDocument9 paginiClosed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLAB7031 GauravÎncă nu există evaluări
- Classical Control Methods for Power ConvertersDocument9 paginiClassical Control Methods for Power ConvertersEmmeth ArdienteÎncă nu există evaluări
- A Novel Fault Tolerant Control Method For Interleaved DC-DC Converters Under Switch Fault ConditionDocument9 paginiA Novel Fault Tolerant Control Method For Interleaved DC-DC Converters Under Switch Fault Conditionjeos20132013Încă nu există evaluări
- Sensorless Current Mode Control-An Observer-Based Technique For DC-DC ConvertersDocument5 paginiSensorless Current Mode Control-An Observer-Based Technique For DC-DC ConvertersDipanjan DasÎncă nu există evaluări
- Survey of Control Methods For DC-DC Converters: KeywordsDocument6 paginiSurvey of Control Methods For DC-DC Converters: KeywordsBernardo GalvanoÎncă nu există evaluări
- HVDC Unit IIDocument5 paginiHVDC Unit IIollata kalanoÎncă nu există evaluări
- Speed Control of BLDC Motor Drive For Various ApplicationsDocument6 paginiSpeed Control of BLDC Motor Drive For Various ApplicationsAnonymous izrFWiQÎncă nu există evaluări
- Voltage and Reactive Power Control: Rolly E. BalayboaDocument17 paginiVoltage and Reactive Power Control: Rolly E. BalayboaGeva GarradoÎncă nu există evaluări
- 486 N20038 PDFDocument6 pagini486 N20038 PDFguddu13481Încă nu există evaluări
- Unity Power FactorDocument6 paginiUnity Power FactorReshmi Parikal RaghavanÎncă nu există evaluări
- Bidirectional DC-DC Converter Modeling and Unified Controller With Digital ImplementationDocument7 paginiBidirectional DC-DC Converter Modeling and Unified Controller With Digital ImplementationVo Thanh TungÎncă nu există evaluări
- Discrete PI and PID Controller Review for Induction Motor DriveDocument4 paginiDiscrete PI and PID Controller Review for Induction Motor DriveAhmad MqdadÎncă nu există evaluări
- Huber 2015Document6 paginiHuber 2015IvanÎncă nu există evaluări
- IJETR031989Document5 paginiIJETR031989erpublicationÎncă nu există evaluări
- Characterization and Performance Comparison of Ripple-Based Control For Voltage Regulator ModulesDocument8 paginiCharacterization and Performance Comparison of Ripple-Based Control For Voltage Regulator ModulesAnonymous Z1RHn9EÎncă nu există evaluări
- Control of A Single-Stage Three-Phase Boost Power Factor Correction RectifierDocument6 paginiControl of A Single-Stage Three-Phase Boost Power Factor Correction RectifierGoriparthi SambasievaraavÎncă nu există evaluări
- 8 Chapter-1Document3 pagini8 Chapter-1Bart llÎncă nu există evaluări
- Fuzzy Logic Controlled Bidirectional DC-DC Converter Applied To DC DriveDocument12 paginiFuzzy Logic Controlled Bidirectional DC-DC Converter Applied To DC DriveTJPRC PublicationsÎncă nu există evaluări
- On The Implementation of Advanced Hybrid Controllers of AC/DC ConvertersDocument7 paginiOn The Implementation of Advanced Hybrid Controllers of AC/DC ConvertersRamón MirelesÎncă nu există evaluări
- A Closed Loop Control Strategy of Transformer-Less Buck-Boost Converter With PID ControllerDocument7 paginiA Closed Loop Control Strategy of Transformer-Less Buck-Boost Converter With PID Controllerbhawna guptaÎncă nu există evaluări
- Review On Different Control Strategies of LLC Series Resonant ConvertersDocument4 paginiReview On Different Control Strategies of LLC Series Resonant ConvertersVanshika JindalÎncă nu există evaluări
- DC MotorDocument6 paginiDC MotoroshyenÎncă nu există evaluări
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDocument13 paginiLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarÎncă nu există evaluări
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 paginiApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsÎncă nu există evaluări
- QBC With Fuzzy 3Document7 paginiQBC With Fuzzy 3Nishanthi BheemanÎncă nu există evaluări
- Controle of Single Phase InvetereDocument6 paginiControle of Single Phase InvetereNasirUddinÎncă nu există evaluări
- Pod Using HVDCDocument31 paginiPod Using HVDCRajeev JhaÎncă nu există evaluări
- Sliding Mode Controller Gains Optimization for Boost PFCDocument6 paginiSliding Mode Controller Gains Optimization for Boost PFCsethukumarkÎncă nu există evaluări
- Ijser: Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 paginiIjser: Simulation of Active Front End Converter Based VFD For Induction Motorsabdallah hosinÎncă nu există evaluări
- Infineon-One Cycle Control IC Simplifies PFC Designs-Article-v01 00-ENDocument5 paginiInfineon-One Cycle Control IC Simplifies PFC Designs-Article-v01 00-ENM. T.Încă nu există evaluări
- 1405 6815 PDFDocument7 pagini1405 6815 PDFPrashanthSamaÎncă nu există evaluări
- Disturbance-Observer-Based Feedback Linearization Control For Stabilization and Accurate Voltage Tracking of A DCDC Boost ConverterDocument14 paginiDisturbance-Observer-Based Feedback Linearization Control For Stabilization and Accurate Voltage Tracking of A DCDC Boost Convertervenkatesh allamÎncă nu există evaluări
- Control of Dual Active BridgeDocument15 paginiControl of Dual Active Bridget64008Încă nu există evaluări
- Advanced Controllers For Quadratic Boost Converter - A Case StudyDocument6 paginiAdvanced Controllers For Quadratic Boost Converter - A Case StudyNishanthi BheemanÎncă nu există evaluări
- Multifratal Analysis of The Pathogenesis of Alzheimer DiseaseDocument4 paginiMultifratal Analysis of The Pathogenesis of Alzheimer DiseaseerpublicationÎncă nu există evaluări
- IJEART06507Document6 paginiIJEART06507erpublicationÎncă nu există evaluări
- IJEART05407Document4 paginiIJEART05407erpublicationÎncă nu există evaluări
- IJEART05408Document2 paginiIJEART05408erpublicationÎncă nu există evaluări
- IJEART06503Document6 paginiIJEART06503erpublicationÎncă nu există evaluări
- IJEART04310Document6 paginiIJEART04310erpublicationÎncă nu există evaluări
- IJEART05413Document6 paginiIJEART05413erpublicationÎncă nu există evaluări
- IJEART05404Document6 paginiIJEART05404erpublicationÎncă nu există evaluări
- IJEART04311Document6 paginiIJEART04311erpublicationÎncă nu există evaluări
- IJEART05402Document7 paginiIJEART05402erpublicationÎncă nu există evaluări
- P-Points in The Construction of The Real Line: Paul CorazzaDocument3 paginiP-Points in The Construction of The Real Line: Paul CorazzaerpublicationÎncă nu există evaluări
- IJEART06501Document6 paginiIJEART06501erpublicationÎncă nu există evaluări
- IJEART04302Document9 paginiIJEART04302erpublicationÎncă nu există evaluări
- IJEART04317Document8 paginiIJEART04317erpublicationÎncă nu există evaluări
- Failure Correction of Linear Array Antenna Using Cuckoo Search AlgorithmDocument4 paginiFailure Correction of Linear Array Antenna Using Cuckoo Search AlgorithmerpublicationÎncă nu există evaluări
- IJEART03109Document4 paginiIJEART03109erpublicationÎncă nu există evaluări
- Flow Characteristics of Viscoelastic Polymer in MicrochannelDocument4 paginiFlow Characteristics of Viscoelastic Polymer in MicrochannelerpublicationÎncă nu există evaluări
- IJEART03104Document6 paginiIJEART03104erpublicationÎncă nu există evaluări
- IJEART03101Document7 paginiIJEART03101erpublicationÎncă nu există evaluări
- Calculation of The Influence of Solid-Phase Concentration On Sewage Pumps Based On Mixture ModelDocument9 paginiCalculation of The Influence of Solid-Phase Concentration On Sewage Pumps Based On Mixture ModelerpublicationÎncă nu există evaluări
- IJEART02808Document7 paginiIJEART02808erpublicationÎncă nu există evaluări
- IJEART03105Document3 paginiIJEART03105erpublicationÎncă nu există evaluări
- IJEART02915Document6 paginiIJEART02915erpublicationÎncă nu există evaluări
- Train Accident Prevention Control by Multi Core Embedded ProcessorDocument4 paginiTrain Accident Prevention Control by Multi Core Embedded ProcessorerpublicationÎncă nu există evaluări
- IJEART02903Document4 paginiIJEART02903erpublicationÎncă nu există evaluări
- Research and Simulation Analysis of Optimizing Dynamic Performance Shift Schedule For Transmission-By-Wire in Electric VehicleDocument5 paginiResearch and Simulation Analysis of Optimizing Dynamic Performance Shift Schedule For Transmission-By-Wire in Electric VehicleerpublicationÎncă nu există evaluări
- IJEART03102Document4 paginiIJEART03102erpublicationÎncă nu există evaluări
- IJEART02906Document9 paginiIJEART02906erpublicationÎncă nu există evaluări
- MG Zno Photodetector Grown by Chemical Spraying Pyrolysis TechniqueDocument6 paginiMG Zno Photodetector Grown by Chemical Spraying Pyrolysis TechniqueerpublicationÎncă nu există evaluări
- IJEART02714Document6 paginiIJEART02714erpublicationÎncă nu există evaluări
- New Microsoft Word DocumentDocument5 paginiNew Microsoft Word DocumentxandercageÎncă nu există evaluări
- Time Series Data Analysis For Forecasting - A Literature ReviewDocument5 paginiTime Series Data Analysis For Forecasting - A Literature ReviewIJMERÎncă nu există evaluări
- Getting BetterDocument3 paginiGetting BetterIngrid MedinaÎncă nu există evaluări
- Upsized To 12 Gallon Still On A 36"x56" Sheet: Pint O Shine's 6 Gallon Pot Still Design and TemplateDocument50 paginiUpsized To 12 Gallon Still On A 36"x56" Sheet: Pint O Shine's 6 Gallon Pot Still Design and TemplateyamyrulesÎncă nu există evaluări
- Neptune Sign House AspectDocument80 paginiNeptune Sign House Aspectmesagirl94% (53)
- 【小马过河】35 TOEFL iBT Speaking Frequent WordsDocument10 pagini【小马过河】35 TOEFL iBT Speaking Frequent WordskakiwnÎncă nu există evaluări
- 10 1016@j Ultras 2016 09 002Document11 pagini10 1016@j Ultras 2016 09 002Ismahene SmahenoÎncă nu există evaluări
- Antiepilepticdg09gdg 121231093314 Phpapp01Document145 paginiAntiepilepticdg09gdg 121231093314 Phpapp01Vaidya NurÎncă nu există evaluări
- Mosek UserguideDocument81 paginiMosek UserguideadethroÎncă nu există evaluări
- Investigation of Water Resources Projects - Preparation of DPRDocument148 paginiInvestigation of Water Resources Projects - Preparation of DPRN.J. PatelÎncă nu există evaluări
- QQQ - Pureyr2 - Chapter 3 - Sequences & Series (V2) : Total Marks: 42Document4 paginiQQQ - Pureyr2 - Chapter 3 - Sequences & Series (V2) : Total Marks: 42Medical ReviewÎncă nu există evaluări
- CH13 QuestionsDocument4 paginiCH13 QuestionsAngel Itachi MinjarezÎncă nu există evaluări
- RBI and Maintenance For RCC Structure SeminarDocument4 paginiRBI and Maintenance For RCC Structure SeminarcoxshulerÎncă nu există evaluări
- BUDDlab Volume2, BUDDcamp 2011: The City of Euphemia, Brescia / ItalyDocument34 paginiBUDDlab Volume2, BUDDcamp 2011: The City of Euphemia, Brescia / ItalyThe Bartlett Development Planning Unit - UCLÎncă nu există evaluări
- Assignment 1 - Tiered LessonDocument15 paginiAssignment 1 - Tiered Lessonapi-320736246Încă nu există evaluări
- Sample Statement of Purpose.42120706Document8 paginiSample Statement of Purpose.42120706Ata Ullah Mukhlis0% (2)
- Signal Processing Problems Chapter 12Document20 paginiSignal Processing Problems Chapter 12CÎncă nu există evaluări
- Консп 1Document48 paginiКонсп 1VadymÎncă nu există evaluări
- PLC 2 Ladder DiagramDocument53 paginiPLC 2 Ladder DiagramAnkur GuptaÎncă nu există evaluări
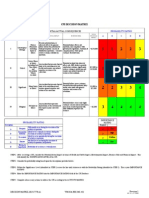
- Decision MatrixDocument12 paginiDecision Matrixrdos14Încă nu există evaluări
- Malla Reddy Engineering College (Autonomous)Document17 paginiMalla Reddy Engineering College (Autonomous)Ranjith KumarÎncă nu există evaluări
- Literary Text Analysis WorksheetDocument1 paginăLiterary Text Analysis Worksheetapi-403444340Încă nu există evaluări
- Lesson Rubric Team Group (Lesson Plan 1)Document2 paginiLesson Rubric Team Group (Lesson Plan 1)Yodalis VazquezÎncă nu există evaluări
- 4idealism Realism and Pragmatigsm in EducationDocument41 pagini4idealism Realism and Pragmatigsm in EducationGaiLe Ann100% (1)
- NMIMS MBA Midterm Decision Analysis and Modeling ExamDocument2 paginiNMIMS MBA Midterm Decision Analysis and Modeling ExamSachi SurbhiÎncă nu există evaluări
- Viola Jones AlgorithmDocument4 paginiViola Jones AlgorithmBhumika GowdaÎncă nu există evaluări
- Math Curriculum Overview Grades 1 8Document1 paginăMath Curriculum Overview Grades 1 8GuiselleÎncă nu există evaluări
- NAVMC 3500.35A (Food Services)Document88 paginiNAVMC 3500.35A (Food Services)Alexander HawkÎncă nu există evaluări
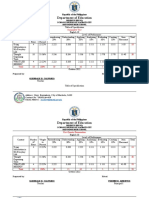
- Table of Specification ENGLISHDocument2 paginiTable of Specification ENGLISHDonn Abel Aguilar IsturisÎncă nu există evaluări
- Roman Questions II PDFDocument738 paginiRoman Questions II PDFjlinderski100% (3)