S-ar putea să vă placă și
- Electricity Objective-Watermark PDFDocument135 paginiElectricity Objective-Watermark PDFsyed muffassirÎncă nu există evaluări
- Home Assignment-5 - (Assignment Problems) Chapter-6Document2 paginiHome Assignment-5 - (Assignment Problems) Chapter-6Rounak MajumdarÎncă nu există evaluări
- Technical Data General Sensors Capabilities WeaponsDocument1 paginăTechnical Data General Sensors Capabilities WeaponsFRdVÎncă nu există evaluări
- Ukuran Nilai Satuan Data Kapal UtamaDocument5 paginiUkuran Nilai Satuan Data Kapal UtamaPutra UtamaÎncă nu există evaluări
- Modeling and Analysis Lab Problems and Solution (17MEL68)Document747 paginiModeling and Analysis Lab Problems and Solution (17MEL68)Mohammed Imran100% (1)
- Imo Resolution A.424Document7 paginiImo Resolution A.424Dane100% (1)
- Age-Related Maintenance Versus Reliability Centred Maintenance: A Case Study On Aero-EnginesDocument6 paginiAge-Related Maintenance Versus Reliability Centred Maintenance: A Case Study On Aero-EnginesDiana CedeñoÎncă nu există evaluări
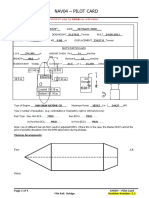
- APPENDIX 7 Sample Wheelhouse Poster and Pilot CardDocument12 paginiAPPENDIX 7 Sample Wheelhouse Poster and Pilot CardamÎncă nu există evaluări
- Stability Analysis of Four Bar Mechanism. Part IDocument9 paginiStability Analysis of Four Bar Mechanism. Part IRizkyArmanÎncă nu există evaluări
- Tugas Fatigue 2Document11 paginiTugas Fatigue 2Syaifur RohmanÎncă nu există evaluări
- Me Engine MCQDocument4 paginiMe Engine MCQSrinivas PillaÎncă nu există evaluări
- Txu 30Document4 paginiTxu 30Poliana PolyÎncă nu există evaluări
- SDM Short Course Kim2 2005 PDFDocument78 paginiSDM Short Course Kim2 2005 PDFFabricio ValenteÎncă nu există evaluări
- 012 - Chapter 2 - L10Document12 pagini012 - Chapter 2 - L10nanduslns07Încă nu există evaluări
- Xiaobo Chen. Offshore Hydrodynamics and ApplicationsDocument19 paginiXiaobo Chen. Offshore Hydrodynamics and ApplicationsYuriy KrayniyÎncă nu există evaluări
- GPS and Navigation FinalDocument28 paginiGPS and Navigation FinalBalasi SimonaÎncă nu există evaluări
- Resonant DC Link InverterDocument9 paginiResonant DC Link InverterSenthil KumarÎncă nu există evaluări
- COAWST User ManualDocument54 paginiCOAWST User ManualAnandh Arasu75% (4)
- Hydrodynamic Response of A Floating Dry DockDocument17 paginiHydrodynamic Response of A Floating Dry DockJayapal RajanÎncă nu există evaluări
- Proiect TneispDocument14 paginiProiect TneispSlav Marius MariusÎncă nu există evaluări
- Voyage Reporting: Watch The Video About The Voyage Performance Monitoring System Navigator InsightDocument8 paginiVoyage Reporting: Watch The Video About The Voyage Performance Monitoring System Navigator Insightmadina pratiwiÎncă nu există evaluări
- Simulation of Flow Around KCS HullDocument11 paginiSimulation of Flow Around KCS HullMilovan PericÎncă nu există evaluări
- Arus Laut:: 1. Stik Plot Tracking (Matlab)Document15 paginiArus Laut:: 1. Stik Plot Tracking (Matlab)arifiyanaÎncă nu există evaluări
- StarSpec ManualDocument69 paginiStarSpec ManualChen Chu-yun100% (1)
- Cv. Muhammad AfifDocument2 paginiCv. Muhammad AfifRoja IswandaÎncă nu există evaluări
- Physics at GURUKUL Constraint Motion: Some More Practice Prof. NandaDocument4 paginiPhysics at GURUKUL Constraint Motion: Some More Practice Prof. NandaVinícius FulconiÎncă nu există evaluări
- 2 Displ TPC & Coef of Forms 2Document20 pagini2 Displ TPC & Coef of Forms 2Aamir SirohiÎncă nu există evaluări
- Maritime English Learning Tool IDocument28 paginiMaritime English Learning Tool IJTKirk61Încă nu există evaluări
- Diagram HamlinDocument11 paginiDiagram HamlinMursalinÎncă nu există evaluări
- Astm d3044 PDFDocument3 paginiAstm d3044 PDFJose Manuel GaliciaÎncă nu există evaluări
- Sample Copy: Time CharterDocument13 paginiSample Copy: Time CharterTuấn Anh VươngÎncă nu există evaluări
- CV Cadet Deck Sayyidah NafisahDocument2 paginiCV Cadet Deck Sayyidah Nafisahsaifudin ahsaniÎncă nu există evaluări
- Lab 6 Microstrip Patch AntennaDocument7 paginiLab 6 Microstrip Patch AntennaMuhammad KaleemÎncă nu există evaluări
- Nav04 - Pilot Card: The Officer Completing The Checklist MUST Enter His Initials As ConfirmationDocument4 paginiNav04 - Pilot Card: The Officer Completing The Checklist MUST Enter His Initials As ConfirmationКонстантин КулаковÎncă nu există evaluări
- ErrorsDocument4 paginiErrorsjeanne pauline cruzÎncă nu există evaluări
- Full Thesis - Kawsar Rashid PDFDocument269 paginiFull Thesis - Kawsar Rashid PDFSadia AfrinÎncă nu există evaluări
- 2023 - Nonlinear Normal Modes of Vibrating Mechanical Systems 10 Years of ProgressDocument57 pagini2023 - Nonlinear Normal Modes of Vibrating Mechanical Systems 10 Years of Progress785902070Încă nu există evaluări
- SeafemDocument87 paginiSeafemPriscila KImÎncă nu există evaluări
- GMDSS ManualDocument1 paginăGMDSS ManualJohn Rey CastillanoÎncă nu există evaluări
- ENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Document5 paginiENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Luis De GraciaÎncă nu există evaluări
- Analysis Techniques (General)Document28 paginiAnalysis Techniques (General)M k iÎncă nu există evaluări
- Uncertainty Analysis in Ship Performance Monitoring Draft Under ReviewDocument23 paginiUncertainty Analysis in Ship Performance Monitoring Draft Under Reviewasit_kgpÎncă nu există evaluări
- Design and Implementation of Attitude Control For 3-Axes Magnetic Coil Stabilization of A SpacecraftDocument146 paginiDesign and Implementation of Attitude Control For 3-Axes Magnetic Coil Stabilization of A SpacecraftManoj SaralayaÎncă nu există evaluări
- Valliammi Engineering College Department of Civil Engineering Ce6404/Surveying-Ii Question Bank Unit-I Control SurveyingDocument8 paginiValliammi Engineering College Department of Civil Engineering Ce6404/Surveying-Ii Question Bank Unit-I Control SurveyingSivarajSivaÎncă nu există evaluări
- Romero Colreg Assignment 2 FinishDocument8 paginiRomero Colreg Assignment 2 FinishJohn joseph romero100% (1)
- ABS Check Sheet SOLAS Surveys AIS Radio Tech - DocmDocument2 paginiABS Check Sheet SOLAS Surveys AIS Radio Tech - DocmAbhijithÎncă nu există evaluări
- Answer For Problem Exercise: 1. Conceptual QuestionDocument2 paginiAnswer For Problem Exercise: 1. Conceptual Questionstill jungkookÎncă nu există evaluări
- Problems: K K K K KDocument2 paginiProblems: K K K K KSadeep MadhushanÎncă nu există evaluări
- Radar Observation of Wind Farms in Various Weather ConditionsDocument5 paginiRadar Observation of Wind Farms in Various Weather ConditionsNishant PandyaÎncă nu există evaluări
- Experimental and Numerical Study of Ship Resistance Due To Hul Vane VariationDocument10 paginiExperimental and Numerical Study of Ship Resistance Due To Hul Vane VariationWina KurniaÎncă nu există evaluări
- CFD Assignment May 2017Document2 paginiCFD Assignment May 2017蒲俊雄Încă nu există evaluări
- ISM Code DOC Checklist For Interim Certification 2021 01Document6 paginiISM Code DOC Checklist For Interim Certification 2021 01Meike berederungÎncă nu există evaluări
- Hooft - Maneuverability of Frigates in WavesDocument10 paginiHooft - Maneuverability of Frigates in WavesjdmorapÎncă nu există evaluări
- Appendix GDocument46 paginiAppendix GMohammed HassanÎncă nu există evaluări
- Reading and Writing SD Card Using Atmega16Document5 paginiReading and Writing SD Card Using Atmega16FarshadParhizkari100% (2)
- Ludeca Smartalign BrochureDocument8 paginiLudeca Smartalign BrochureNestor LopezÎncă nu există evaluări
- Mru 9Document2 paginiMru 9Daniel LiuÎncă nu există evaluări
- Proposal Monitoring Systems LeicaDocument22 paginiProposal Monitoring Systems LeicaYusup Hendra PerkasaÎncă nu există evaluări
- Ramdan - 18010040 - Chapter 2 - Exercises - 2021Document3 paginiRamdan - 18010040 - Chapter 2 - Exercises - 2021Sandi EimiÎncă nu există evaluări
- Sec385 TMDocument13 paginiSec385 TMАндрейÎncă nu există evaluări
- How To InstallDocument1 paginăHow To InstallOhlaiÎncă nu există evaluări
- Topic: Fiber Optic Network Design: Table of Contents: The FOA Reference Guide To Fiber OpticsDocument25 paginiTopic: Fiber Optic Network Design: Table of Contents: The FOA Reference Guide To Fiber OpticsEdo KesumaÎncă nu există evaluări
- PID DesignDocument1 paginăPID DesignEdo KesumaÎncă nu există evaluări
- Gettysburg Address by Abraham LincolnDocument1 paginăGettysburg Address by Abraham LincolnEdo KesumaÎncă nu există evaluări
- Hydraulic Home ElevatorDocument38 paginiHydraulic Home ElevatorPatrisha SantosÎncă nu există evaluări
- Soccer Field Lighting DesignDocument22 paginiSoccer Field Lighting DesigndevakaÎncă nu există evaluări
- Standards of MeasurementDocument12 paginiStandards of MeasurementShubham KheraÎncă nu există evaluări
- Astm B446 - 2003 - 2008Document5 paginiAstm B446 - 2003 - 2008isaque300984Încă nu există evaluări
- NEOCLASSICAL CITY PlanningDocument10 paginiNEOCLASSICAL CITY PlanningAfrahÎncă nu există evaluări
- Thermal Processing - Quality Management Is Vital in Heat-TreatingDocument1 paginăThermal Processing - Quality Management Is Vital in Heat-TreatingJader PitangueiraÎncă nu există evaluări
- Guide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsDocument12 paginiGuide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsMauricio Javier León TejadaÎncă nu există evaluări
- Die Casting Process & Design Gate & ParametersDocument113 paginiDie Casting Process & Design Gate & ParametersEr Tarun Patel100% (1)
- Aero 3 - 8 Anna's SyllabusDocument110 paginiAero 3 - 8 Anna's SyllabusShiva UÎncă nu există evaluări
- Pages From 0625 - w15 - QP - 33-06Document2 paginiPages From 0625 - w15 - QP - 33-06lelon ongÎncă nu există evaluări
- YesDocument80 paginiYesRonnie TorresÎncă nu există evaluări
- Single Aisle Technical Training Manual T1 (CFM 56) (LVL 2&3) LightsDocument44 paginiSingle Aisle Technical Training Manual T1 (CFM 56) (LVL 2&3) LightsarunÎncă nu există evaluări
- Data Structures NotesDocument9 paginiData Structures NotesMohammed JeelanÎncă nu există evaluări
- SEPARATION THEORY - From Basic Separation To ALCAP SystemDocument42 paginiSEPARATION THEORY - From Basic Separation To ALCAP SystemmgbouneÎncă nu există evaluări
- Electroplating of Silver, Zinc and IronDocument13 paginiElectroplating of Silver, Zinc and IronTahira AzamÎncă nu există evaluări
- Garmin Gtx327 ImDocument55 paginiGarmin Gtx327 ImHarry NuryantoÎncă nu există evaluări
- Exploring The Versatility and Utility of ABS Plastic SheetsDocument3 paginiExploring The Versatility and Utility of ABS Plastic SheetsSinghal Industries Pvt LtdÎncă nu există evaluări
- Data SheetDocument5 paginiData Sheetsongtu2552Încă nu există evaluări
- Injection Molding TrainingDocument131 paginiInjection Molding TrainingNuria Varela100% (3)
- ReadmeDocument9 paginiReadmewatzzupÎncă nu există evaluări
- Bavaria Reverse RdsDocument15 paginiBavaria Reverse RdsDušan JovanovićÎncă nu există evaluări
- Bolts TheoryDocument30 paginiBolts TheoryIbrahim Mesfin100% (1)
- EnglishDocument6 paginiEnglishThineswary Siva naiduÎncă nu există evaluări
- Nupack User Guide 3.2Document44 paginiNupack User Guide 3.2Dicastelgandolfo VchÎncă nu există evaluări
- Lab Manual CS AmplifierDocument10 paginiLab Manual CS Amplifieramey bhirangeÎncă nu există evaluări
- Microprocessors - Meppayil NarayananDocument34 paginiMicroprocessors - Meppayil NarayananmeppayilnarayananÎncă nu există evaluări
- Contra Dam, SwissDocument31 paginiContra Dam, SwissSudheekar ReddyÎncă nu există evaluări
- Gear Trains ProblemsDocument9 paginiGear Trains Problemsa c s Kumar100% (1)
- Dental CementDocument74 paginiDental CementAisha samreenÎncă nu există evaluări
- Castrol - Iceomatic SW 68Document7 paginiCastrol - Iceomatic SW 68advantage025Încă nu există evaluări