S-ar putea să vă placă și
- Topología y geometría diferencial con aplicaciones a la físicaDe la EverandTopología y geometría diferencial con aplicaciones a la físicaEvaluare: 5 din 5 stele5/5 (1)
- Clase Respuesta en El Tiempo Usando MatlabDocument26 paginiClase Respuesta en El Tiempo Usando MatlabJesus Tapia GallardoÎncă nu există evaluări
- Reporte Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenDocument25 paginiReporte Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenfredirevÎncă nu există evaluări
- Clase 11 Análisis de La Respuesta en El Tiempo Usando Matlab PDFDocument25 paginiClase 11 Análisis de La Respuesta en El Tiempo Usando Matlab PDFMarvinJosephDeLaCruzAntaurcoÎncă nu există evaluări
- Matlab para Analisis Dinamico de SistemasDocument5 paginiMatlab para Analisis Dinamico de SistemasMilenka QuisbertÎncă nu există evaluări
- Experiencias-Control 2Document63 paginiExperiencias-Control 2Jhojan MamaniÎncă nu există evaluări
- Ejercicios Sistemas 1er OrdenDocument11 paginiEjercicios Sistemas 1er OrdenMklptFrswÎncă nu există evaluări
- Practica Matlab Simulink Ec. DiferencialDocument8 paginiPractica Matlab Simulink Ec. DiferencialJesús AlvaradoÎncă nu există evaluări
- PARCIALDocument30 paginiPARCIALNicolás Torres Valencia100% (1)
- Presentacion CS 2-2Document18 paginiPresentacion CS 2-2Mariana TrañaÎncă nu există evaluări
- Control Digital FSTDocument7 paginiControl Digital FSTRicardo Rodriguez BustinzaÎncă nu există evaluări
- Cuestionario 1 A2 ResueltoDocument3 paginiCuestionario 1 A2 ResueltoanaÎncă nu există evaluări
- EwrweDocument9 paginiEwrweDavidGarciaChÎncă nu există evaluări
- Practica 9 y 10 - LCA1Document16 paginiPractica 9 y 10 - LCA1HéctorÎncă nu există evaluări
- Cuestionario 1 A3 ResueltoDocument3 paginiCuestionario 1 A3 ResueltoanaÎncă nu există evaluări
- LabControl P03 ML S0119 MJVDocument7 paginiLabControl P03 ML S0119 MJVJULIÁN ANDRES LÓPEZ RODRÍGUEZÎncă nu există evaluări
- Ejercicios de Teoria de Control AutomaticoDocument8 paginiEjercicios de Teoria de Control AutomaticoManuel Campos BorrasÎncă nu există evaluări
- Taller 2 CorteDocument8 paginiTaller 2 CorteJuan Pablo QuinteroÎncă nu există evaluări
- PC1 2020-1Document6 paginiPC1 2020-1Gustavo Moreno AstoÎncă nu există evaluări
- Fase 5 - Trabajo PrácticoDocument18 paginiFase 5 - Trabajo PrácticoJairo GuevaraÎncă nu există evaluări
- Laboratorio 8Document8 paginiLaboratorio 8sirius64Încă nu există evaluări
- Modelado Matemático de Sistemas FísicosDocument44 paginiModelado Matemático de Sistemas FísicosRicardoSntiagoÎncă nu există evaluări
- Lab3 - Funciones Discretas - SerranoM MaríaDocument24 paginiLab3 - Funciones Discretas - SerranoM MaríaMaria SÎncă nu există evaluări
- Intro SecoDocument18 paginiIntro SecostalinÎncă nu există evaluări
- Problemas Modelado de SistemasDocument27 paginiProblemas Modelado de Sistemasadin bellatorÎncă nu există evaluări
- Clase 11 Orden SuperiorDocument10 paginiClase 11 Orden SuperiorRonny CondorÎncă nu există evaluări
- Control Digital Taller ParcialDocument3 paginiControl Digital Taller ParcialOmar David Peña IbarraÎncă nu există evaluări
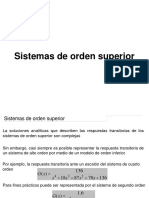
- Sistemas de Orden SuperiorDocument11 paginiSistemas de Orden SuperiorRafael Diaz RomeroÎncă nu există evaluări
- Análisis en El Dominio Del TiempoDocument11 paginiAnálisis en El Dominio Del TiempoOmar Alonso Barrantes ZuñigaÎncă nu există evaluări
- Parcial Final Tercer CorteDocument7 paginiParcial Final Tercer CorteJUAN CAMILO CASALLAS FARIASÎncă nu există evaluări
- 10-Presentacion Controlador PidDocument33 pagini10-Presentacion Controlador PidMARIANOÎncă nu există evaluări
- Momento 3 - Trabajo Colaborativo 2 - Edwin ZapataDocument11 paginiMomento 3 - Trabajo Colaborativo 2 - Edwin ZapataEdwin Zapata Cardona100% (1)
- Labo Control I - Practica N°01 PDFDocument10 paginiLabo Control I - Practica N°01 PDFMoises QuispeÎncă nu există evaluări
- Taller 1-2 Representacion SistemasDocument3 paginiTaller 1-2 Representacion SistemasYochua dÎncă nu există evaluări
- Guia2 2019 ControlDocument4 paginiGuia2 2019 ControlJorSepulvedaÎncă nu există evaluări
- Taller1 de Sistemas de Control DigitalDocument3 paginiTaller1 de Sistemas de Control DigitalLU PAÎncă nu există evaluări
- Determinación Experimental de La Función de TransferenciaDocument10 paginiDeterminación Experimental de La Función de TransferenciaRicardo Rodriguez BustinzaÎncă nu există evaluări
- Practica 5Document10 paginiPractica 5Martin Lopez ArteagaÎncă nu există evaluări
- Caracteristicas de La RTDocument3 paginiCaracteristicas de La RTfabian gomezÎncă nu există evaluări
- Practica 8Document6 paginiPractica 8Arturo RomeroÎncă nu există evaluări
- 3.3. Sistemas de Orden SuperiorDocument8 pagini3.3. Sistemas de Orden SuperiorYasna Suárez100% (2)
- Respuesta en Frecuencia en Sistemas de ControlDocument49 paginiRespuesta en Frecuencia en Sistemas de ControlArmando JacquinÎncă nu există evaluări
- Lab 2 Etn-702Document14 paginiLab 2 Etn-702Ivan Quispe LugoÎncă nu există evaluări
- T2 - Ejercicios y SolucionesDocument16 paginiT2 - Ejercicios y SolucionesPablo Rodriguez Del BrioÎncă nu există evaluări
- 08 Reporte, Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenDocument23 pagini08 Reporte, Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenFernando AlbarránÎncă nu există evaluări
- Señales de PruebaDocument8 paginiSeñales de PruebaecalderoncomtelingerÎncă nu există evaluări
- Lab. Sistema de Primer Orden y Segundo OrdenDocument17 paginiLab. Sistema de Primer Orden y Segundo OrdenNando NandoÎncă nu există evaluări
- Lab3 SandovalDocument12 paginiLab3 SandovalFELIPE CAMILO SANDOVAL PAINENÎncă nu există evaluări
- Práctica1 U3 Respuesta Escalón e ImpulsoDocument16 paginiPráctica1 U3 Respuesta Escalón e ImpulsoEdgar Aaron NavarreteÎncă nu există evaluări
- Compensadores AdelantoDocument33 paginiCompensadores AdelantoeibygvÎncă nu există evaluări
- 5 Respuesta TransitoriaDocument11 pagini5 Respuesta TransitoriaAmanda GarcíaÎncă nu există evaluări
- Variables de EstadoDocument12 paginiVariables de EstadoGiovanni SalazarÎncă nu există evaluări
- Control 2Document12 paginiControl 2Angel CazaresÎncă nu există evaluări
- Respuesta en Frecuencia en SistemasDocument49 paginiRespuesta en Frecuencia en SistemasMartinuccio Alejandro100% (1)
- TCA2 - Experiencia 3Document29 paginiTCA2 - Experiencia 3Jose Ivan Cueto100% (1)
- Lab 5 Sistemas de Control 04052022Document7 paginiLab 5 Sistemas de Control 04052022Igor Alberto Quezada NikulinaÎncă nu există evaluări
- 4.1 Sistemas de 1er, 2do y Orden SuperiorDocument25 pagini4.1 Sistemas de 1er, 2do y Orden SuperiorLuis GonzalesÎncă nu există evaluări
- Laboratorio N01 Control Digital PDFDocument11 paginiLaboratorio N01 Control Digital PDFjorgeÎncă nu există evaluări
- Enunciado TP - FUNCION - TRANSFERENCIA - PLANO - COMPLEJODocument4 paginiEnunciado TP - FUNCION - TRANSFERENCIA - PLANO - COMPLEJOElíasJuliánÎncă nu există evaluări
- PROMELSA - Reflector LED Floodlight HP 400W - 857 48000Lm PDFDocument3 paginiPROMELSA - Reflector LED Floodlight HP 400W - 857 48000Lm PDFguillermo huerta gonzalesÎncă nu există evaluări
- Tcc. La UniónDocument11 paginiTcc. La UniónYan Carlos Zarante LopezÎncă nu există evaluări
- Ruta PR-CV-428 (LCAFD en Betxí)Document28 paginiRuta PR-CV-428 (LCAFD en Betxí)Jorge de la RosaÎncă nu există evaluări
- Fracciones EquivalentesDocument2 paginiFracciones EquivalentesBarbara Retamal100% (1)
- BM Unidad 1 - Fundamentos de Biología MolecularDocument35 paginiBM Unidad 1 - Fundamentos de Biología MolecularJolet van HouwelingenÎncă nu există evaluări
- Cierre Anual y Papeles de Trabajo Curso 3 PDFDocument2 paginiCierre Anual y Papeles de Trabajo Curso 3 PDFRodrigo QuixtanÎncă nu există evaluări
- ECOSISTEMADocument22 paginiECOSISTEMAferancÎncă nu există evaluări
- Guía ConductismoDocument11 paginiGuía ConductismoMarta nubia Rivadeneira cortesÎncă nu există evaluări
- Dialecto e IdiolectoDocument5 paginiDialecto e IdiolectoSebastian MontesÎncă nu există evaluări
- Residuos Tóxicos Del DuraznoDocument22 paginiResiduos Tóxicos Del DuraznoFrancis GCÎncă nu există evaluări
- Derecho PrivadoDocument2 paginiDerecho PrivadonicanÎncă nu există evaluări
- REPORTE PRACTICA No. 3 TRAZO DE CURVA TOPO 2Document18 paginiREPORTE PRACTICA No. 3 TRAZO DE CURVA TOPO 2Alan Vasquéz DardónÎncă nu există evaluări
- Programación IESSV 2018-19 1º ASIR (Tardes) - Implantación de Sistemas OperativosDocument25 paginiProgramación IESSV 2018-19 1º ASIR (Tardes) - Implantación de Sistemas OperativosLuis FontalbanÎncă nu există evaluări
- 11 Bolsa de Suplentes Pli07 2 2024Document27 pagini11 Bolsa de Suplentes Pli07 2 2024Jose Carlos BotoÎncă nu există evaluări
- Ejercicio 2Document14 paginiEjercicio 2Julio Palomino Blanco83% (6)
- S (19) - Circunferencia WordDocument14 paginiS (19) - Circunferencia WordMiguel CapchaÎncă nu există evaluări
- Tornillo Sin Fin Problema ResueltoDocument6 paginiTornillo Sin Fin Problema Resueltoeeeepla0% (1)
- Preparacion de Arroz Con Coco - Soraya SierraDocument11 paginiPreparacion de Arroz Con Coco - Soraya SierraJose Evelio Cardona GonzalezÎncă nu există evaluări
- Paletas de CarameloDocument8 paginiPaletas de CarameloJose Juan Santiago RamirezÎncă nu există evaluări
- Taller Conversion y Resistencias 3Document4 paginiTaller Conversion y Resistencias 3Gustavo ValenciaÎncă nu există evaluări
- Dientes Neonatales y NatalesDocument35 paginiDientes Neonatales y Natalescarlos fuentes100% (1)
- Alonso en El País de Los IncasDocument69 paginiAlonso en El País de Los IncasMARIA JESUS FERNANDEZ LOPEZ60% (5)
- ConjuntivaDocument1 paginăConjuntivaMitzy NavarreteÎncă nu există evaluări
- Cotizacíon Mallas Zaranda ST4.8Document1 paginăCotizacíon Mallas Zaranda ST4.8Luis ValenciaÎncă nu există evaluări
- Iea 1º Electrotecnia PDFDocument4 paginiIea 1º Electrotecnia PDFMa SiluÎncă nu există evaluări
- Ley General de Sociedades MercantilesDocument3 paginiLey General de Sociedades MercantilesYuliana Gtz. A.Încă nu există evaluări
- 110 Recetas de CocinaDocument182 pagini110 Recetas de CocinaAlejandra BerónÎncă nu există evaluări
- Quiz - Escenario 2 - SEGUNDO BLOQUE-TEORICO - VIRTUAL - ACTUALIZACIÓN JURÍDICA EN RIESGOS Y SEGUROSDocument7 paginiQuiz - Escenario 2 - SEGUNDO BLOQUE-TEORICO - VIRTUAL - ACTUALIZACIÓN JURÍDICA EN RIESGOS Y SEGUROSlepadel85Încă nu există evaluări
- Banco de Preguntas SNCDocument3 paginiBanco de Preguntas SNCVilma Eduviges Roca BosquezÎncă nu există evaluări
- Divircio Lisbeth RojasDocument3 paginiDivircio Lisbeth RojasNELLY PEÑAÎncă nu există evaluări