S-ar putea să vă placă și
- MAS CC AF Le BihanDocument8 paginiMAS CC AF Le Bihanngay7thang2Încă nu există evaluări
- BTS Phy 96Document12 paginiBTS Phy 96Abderrahmane WardiÎncă nu există evaluări
- Modélisation D'une Machine Asynchrone Sous Matlab en Vue Sa Commande PDFDocument37 paginiModélisation D'une Machine Asynchrone Sous Matlab en Vue Sa Commande PDFGUESSOUMA100% (1)
- TD N°3Document7 paginiTD N°3Nabil Mekimah100% (1)
- Fansi Sivakumaran CR TP2 MercrediDocument19 paginiFansi Sivakumaran CR TP2 MercrediSonny FansiÎncă nu există evaluări
- Quetions MsDocument9 paginiQuetions Msidoumou.abdemouÎncă nu există evaluări
- Rattrapage 20152016Document4 paginiRattrapage 20152016aolearninÎncă nu există evaluări
- Commande MAS 2Document29 paginiCommande MAS 2Sofiane DouidaÎncă nu există evaluări
- TD1 - MasDocument4 paginiTD1 - MasOussama Starex100% (2)
- TP 01Document19 paginiTP 01tete200414Încă nu există evaluări
- Cours Commande MASDocument28 paginiCours Commande MASChristo RouynÎncă nu există evaluări
- Chap IVDocument8 paginiChap IVChristo RouynÎncă nu există evaluări
- 2008 2009 Prem Session ToutDocument6 pagini2008 2009 Prem Session ToutIslam MęĐjÎncă nu există evaluări
- Tp3 Simulation D Un Hacheur Et D Un MCC Avec Regulation de VitesseDocument5 paginiTp3 Simulation D Un Hacheur Et D Un MCC Avec Regulation de VitesseLø Kâ100% (2)
- Chapitre IIIDocument22 paginiChapitre IIIAnisse HimeurÎncă nu există evaluări
- Compte Rendu FinisDocument11 paginiCompte Rendu FinisRafaël JacquetÎncă nu există evaluări
- Moto Reduct EurDocument55 paginiMoto Reduct EurJawher SalemÎncă nu există evaluări
- MAS Autopilotage FrequentielDocument9 paginiMAS Autopilotage FrequentielSerigne Mbacke BeyeÎncă nu există evaluări
- App2 CH1 Régulation Angulaire MCCDocument2 paginiApp2 CH1 Régulation Angulaire MCCHaroun AmirÎncă nu există evaluări
- Correction 25Document8 paginiCorrection 25Fth WalterÎncă nu există evaluări
- TP EnonceeDocument9 paginiTP EnonceeAbdollah El AissiÎncă nu există evaluări
- Travaux Diriges Sur Le HacheurDocument4 paginiTravaux Diriges Sur Le HacheurJulesÎncă nu există evaluări
- Chap II: Entrainement Par Un Moteur À Courant Continu:: N PN N N/aDocument12 paginiChap II: Entrainement Par Un Moteur À Courant Continu:: N PN N N/aoriginyoucef17Încă nu există evaluări
- Rapport AlamiDocument17 paginiRapport AlamiMohamed HilmiÎncă nu există evaluări
- Saturation MASDocument6 paginiSaturation MASMagloire TshihilukaÎncă nu există evaluări
- AYAT Nabil CRDocument21 paginiAYAT Nabil CRayat100% (1)
- 1) Tracé de La Caractéristique Du Conducteur Ohmique: Calibre 200 MaDocument3 pagini1) Tracé de La Caractéristique Du Conducteur Ohmique: Calibre 200 Maمجهول العالم100% (1)
- Caracteristique MCCDocument5 paginiCaracteristique MCCSoufianeBattalÎncă nu există evaluări
- 414Document8 pagini414Abdelhamid DaribÎncă nu există evaluări
- Caracteristique D Un Dipole Actif Cours 3Document7 paginiCaracteristique D Un Dipole Actif Cours 3Jean AmaniÎncă nu există evaluări
- tp°2COMMANDE VECTORILLE DIRACTEpdfDocument19 paginitp°2COMMANDE VECTORILLE DIRACTEpdfمكتبة الأمانيÎncă nu există evaluări
- TD AsynchDocument2 paginiTD AsynchKadri MongiÎncă nu există evaluări
- Moteur SérieDocument2 paginiMoteur SérieAb CdÎncă nu există evaluări
- Les Lois de l' Electricite 3AB2023Document5 paginiLes Lois de l' Electricite 3AB2023Dieuboue ArthurÎncă nu există evaluări
- 1 Etude Expérimentale: Terminale Génie Electrotechnique B-3-2-1-Conversion de Tension Continue en Courant ContinuDocument5 pagini1 Etude Expérimentale: Terminale Génie Electrotechnique B-3-2-1-Conversion de Tension Continue en Courant ContinuKader SaidaneÎncă nu există evaluări
- Serie CC EvvDocument4 paginiSerie CC EvvNourBouzid100% (1)
- Chapitre IVDocument11 paginiChapitre IVAnisse HimeurÎncă nu există evaluări
- Commande Vectorielle MasDocument64 paginiCommande Vectorielle MasbadrÎncă nu există evaluări
- TP 03 Commande Des Machines ElectriquesDocument14 paginiTP 03 Commande Des Machines Electriquesmoustapha.lahi04Încă nu există evaluări
- Chapitre3 Technique de La Commande ÉlectriqueDocument11 paginiChapitre3 Technique de La Commande Électriqueاشر اقÎncă nu există evaluări
- Travaux Diriges Sur La Commande Des Machines AsynchronesDocument5 paginiTravaux Diriges Sur La Commande Des Machines AsynchronesArnold Donfack100% (1)
- CH14Document6 paginiCH14AFAFÎncă nu există evaluări
- TD1 ElectrocinétiqueDocument1 paginăTD1 Electrocinétiqueseljohann16Încă nu există evaluări
- E99p054 AsservissementDocument11 paginiE99p054 AsservissementHiba Allah El AhnafÎncă nu există evaluări
- ElectrotechniqueSTSCNED TP2 PDFDocument18 paginiElectrotechniqueSTSCNED TP2 PDFKarim ZaraiÎncă nu există evaluări
- CH2 B PDFDocument10 paginiCH2 B PDFamine milanoÎncă nu există evaluări
- Reglage Vitesse MCCDocument3 paginiReglage Vitesse MCCrabietecÎncă nu există evaluări
- Machines Asynchrones Commande Vectorielle LivreDocument34 paginiMachines Asynchrones Commande Vectorielle LivreSofiane DouidaÎncă nu există evaluări
- AttachmentDocument6 paginiAttachmentDjibril BahÎncă nu există evaluări
- Commande D'une Machine À Courant Continu À Vitesse VariableDocument30 paginiCommande D'une Machine À Courant Continu À Vitesse VariableSue Chamieh90% (10)
- TP Commande Des MachinesDocument21 paginiTP Commande Des MachinesTa Divika Hasterivy100% (1)
- Principe Du Hacheur SérieDocument9 paginiPrincipe Du Hacheur SérieRedouane ElkorchÎncă nu există evaluări
- tp1 Moteur SérieDocument3 paginitp1 Moteur SérieAb CdÎncă nu există evaluări
- Commande MCCDocument20 paginiCommande MCCMoez YoussefÎncă nu există evaluări
- Exercices d'optique et d'électromagnétismeDe la EverandExercices d'optique et d'électromagnétismeEvaluare: 5 din 5 stele5/5 (1)
- Homographie: Homographie : transformations en vision par ordinateurDe la EverandHomographie: Homographie : transformations en vision par ordinateurÎncă nu există evaluări
- Modelisation StructuresDocument40 paginiModelisation StructuresRabih BasbousÎncă nu există evaluări
- References Atee 2Document19 paginiReferences Atee 2Tarak BenslimaneÎncă nu există evaluări
- Modelisation Et Commande de La Machine Asynchrone: J.P Caron, J.P HautierDocument4 paginiModelisation Et Commande de La Machine Asynchrone: J.P Caron, J.P HautierTarak Benslimane0% (1)
- Réalisation D'un Onduleur MLIDocument7 paginiRéalisation D'un Onduleur MLIWiam AyrirÎncă nu există evaluări
- Pedagogie GeneraleDocument28 paginiPedagogie GeneraleTarak Benslimane100% (1)
- Dossier de Branchement ImmeubleDocument2 paginiDossier de Branchement ImmeubleTarak BenslimaneÎncă nu există evaluări
- Licences U.msilaDocument1 paginăLicences U.msilaTarak BenslimaneÎncă nu există evaluări
- Envoi 762 - DGRSDTDocument2 paginiEnvoi 762 - DGRSDTTarak BenslimaneÎncă nu există evaluări
- B Raccordement Au Reseau de Distribution Publique MT 1 PDFDocument21 paginiB Raccordement Au Reseau de Distribution Publique MT 1 PDFTarak BenslimaneÎncă nu există evaluări
- Chouaib HamzaDocument1 paginăChouaib HamzaTarak BenslimaneÎncă nu există evaluări
- Corrige Septembre 2010Document34 paginiCorrige Septembre 2010Tarak BenslimaneÎncă nu există evaluări
- Généralité Distribution PDFDocument28 paginiGénéralité Distribution PDFSara AdnanÎncă nu există evaluări
- 22 Dimensionnement PDFDocument2 pagini22 Dimensionnement PDFTarak BenslimaneÎncă nu există evaluări
- Armoire Distribution BTDocument20 paginiArmoire Distribution BTMostapha HamdaouiÎncă nu există evaluări
- Circuit RCDocument11 paginiCircuit RCTarak BenslimaneÎncă nu există evaluări
- U1122AFE V2 FR 2Document6 paginiU1122AFE V2 FR 2Tarak BenslimaneÎncă nu există evaluări
- Equipe Ge LimeDocument7 paginiEquipe Ge LimeTarak BenslimaneÎncă nu există evaluări
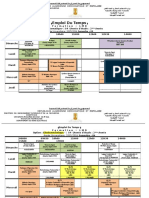
- Emploi Du Temps Final s2 2015-2016Document10 paginiEmploi Du Temps Final s2 2015-2016Tarak BenslimaneÎncă nu există evaluări
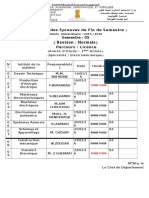
- EFS 2015 2016 S1Session NormaleDocument12 paginiEFS 2015 2016 S1Session NormaleTarak BenslimaneÎncă nu există evaluări
- Edp 19Document26 paginiEdp 19Tarak BenslimaneÎncă nu există evaluări
- Depollution ActiveDocument14 paginiDepollution ActiveTarak BenslimaneÎncă nu există evaluări
- Synthese Des Theories de Definition Des Puissances en Regime Non SinusoidalDocument39 paginiSynthese Des Theories de Definition Des Puissances en Regime Non SinusoidalTarak BenslimaneÎncă nu există evaluări
- LP53Document7 paginiLP53Tarak BenslimaneÎncă nu există evaluări
- Co SP FiltrageDocument9 paginiCo SP FiltrageTarak BenslimaneÎncă nu există evaluări
- Licence Electrotechnique FinaleDocument32 paginiLicence Electrotechnique FinaleTarak BenslimaneÎncă nu există evaluări
- LP53Document7 paginiLP53Tarak BenslimaneÎncă nu există evaluări
- Régulation de La Tension D'alimentation Du Filtre Actif Parallèle Par PI AdaptatifDocument1 paginăRégulation de La Tension D'alimentation Du Filtre Actif Parallèle Par PI AdaptatifTarak BenslimaneÎncă nu există evaluări
- Biblio Graph I eDocument5 paginiBiblio Graph I eTarak BenslimaneÎncă nu există evaluări
- LMD ElectromécaniqueDocument32 paginiLMD ElectromécaniqueTarak BenslimaneÎncă nu există evaluări
- LMD AutomatiqueDocument29 paginiLMD AutomatiqueTarak BenslimaneÎncă nu există evaluări
- 965 Fiche Pleiades Comfie VFDocument2 pagini965 Fiche Pleiades Comfie VFYoussef ELÎncă nu există evaluări
- Coûts Déchets Investissements-DépensesDocument4 paginiCoûts Déchets Investissements-DépensessusCities75% (4)
- Calcule Des Prix Des Carburants MarocDocument18 paginiCalcule Des Prix Des Carburants MarocYassine BadawiÎncă nu există evaluări
- CTRT ER BT FR VerDef GeneralDocument5 paginiCTRT ER BT FR VerDef GeneralRaghdaÎncă nu există evaluări
- Conception Et Évaluation Des Avantages Potentiels de L'energie Transactive Dans Le Systeme Électrique MarocainDocument9 paginiConception Et Évaluation Des Avantages Potentiels de L'energie Transactive Dans Le Systeme Électrique MarocainYoussef romadiÎncă nu există evaluări
- Info - Express N°23Document2 paginiInfo - Express N°23Rezaiguia RebaiÎncă nu există evaluări
- Rapport de Stage Hermann Eneo Corrige Et BonDocument101 paginiRapport de Stage Hermann Eneo Corrige Et BonNgueundapÎncă nu există evaluări
- Copie de Xls Determine La Puissance Ideale Pour Votre Climatisation Et de Votre ChauffageDocument1 paginăCopie de Xls Determine La Puissance Ideale Pour Votre Climatisation Et de Votre ChauffageAnouar Aleya100% (1)
- d5510 Aerodrome PDFDocument16 paginid5510 Aerodrome PDFDidaBouchÎncă nu există evaluări
- Liste Exposants BATIMAT2013Document91 paginiListe Exposants BATIMAT2013sada44Încă nu există evaluări
- Saeco Via Veneto DeluxeDocument92 paginiSaeco Via Veneto DeluxeAna OdysÎncă nu există evaluări
- Liste Des FiguresDocument3 paginiListe Des FiguresKael ArialÎncă nu există evaluări
- Guide Rage Facade Multiple Double Peau 2014 02Document99 paginiGuide Rage Facade Multiple Double Peau 2014 02FINITION100% (1)
- Dimensiones MAG 5100WDocument3 paginiDimensiones MAG 5100WDaniel Mendoza MedinaÎncă nu există evaluări
- Fichier Produit 37Document7 paginiFichier Produit 37Majdi JerbiÎncă nu există evaluări
- 1508 Em27102014 PDFDocument18 pagini1508 Em27102014 PDFelmoudjahid_dzÎncă nu există evaluări
- Strategie CompetitiviteDocument149 paginiStrategie CompetitivitetchuipetÎncă nu există evaluări
- Le Secteur Des Énergies Renouvelables en TunisieDocument3 paginiLe Secteur Des Énergies Renouvelables en TunisieOlfa Nabli100% (1)
- Revue19 - 2013 12 31 PDFDocument36 paginiRevue19 - 2013 12 31 PDFPaul DayÎncă nu există evaluări
- Rapport Arse New - NetDocument52 paginiRapport Arse New - Netpatrick SiaÎncă nu există evaluări
- Snecma M53Document8 paginiSnecma M53midoÎncă nu există evaluări
- 3 PV Hybride - PPSXDocument48 pagini3 PV Hybride - PPSXKais SeddikiÎncă nu există evaluări
- Usinage Et Transformation Du Riz LocalDocument20 paginiUsinage Et Transformation Du Riz Localsakhoib80% (5)
- Guide de Reference de L'eclairageDocument84 paginiGuide de Reference de L'eclairagekakeish100% (1)
- RecapitulatifDocument1 paginăRecapitulatifaymenÎncă nu există evaluări
- Machines A Courant Continu - ConstructionDocument16 paginiMachines A Courant Continu - ConstructionMouhsineAtb100% (3)
- Driss Cahier de ChargeDocument24 paginiDriss Cahier de ChargeOuafae Bouchequif100% (1)
- 5 Dotation Des Fusibles de La Boite A Fusibles Et A Relais Dans Le Compartiment Moteur A Gauche w204Document3 pagini5 Dotation Des Fusibles de La Boite A Fusibles Et A Relais Dans Le Compartiment Moteur A Gauche w204axime64% (11)
- Chapitre 7 Differents Modes Excitation Des Machine A Courant ContinuDocument9 paginiChapitre 7 Differents Modes Excitation Des Machine A Courant Continuarbaoui11100% (1)
- ChauffageDocument22 paginiChauffageAbdérrahmane Bns100% (1)