S-ar putea să vă placă și
- MITOCW - MITRES2 - 002s10nonlinear - Lec08 - 300k-mp4: ProfessorDocument12 paginiMITOCW - MITRES2 - 002s10nonlinear - Lec08 - 300k-mp4: ProfessorFelipe Dornellas SilvaÎncă nu există evaluări
- MITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDocument21 paginiMITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDanielÎncă nu există evaluări
- L27jvpzoz yDocument17 paginiL27jvpzoz yBastian DewiÎncă nu există evaluări
- MITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorDocument16 paginiMITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorBastian DewiÎncă nu există evaluări
- Pauls Online Notes - Differential Equations - Mechanical VibrationsDocument15 paginiPauls Online Notes - Differential Equations - Mechanical VibrationsRicardo ColosimoÎncă nu există evaluări
- Lec3 1 PDFDocument13 paginiLec3 1 PDFsuhail khanÎncă nu există evaluări
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleDocument12 paginiTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuÎncă nu există evaluări
- Lec26 3 PDFDocument8 paginiLec26 3 PDFDharmendra JainÎncă nu există evaluări
- Finite Element Analysis Prof. Dr.B.N.Rao Department of Civil Engineering Indian Institute of Technology, MadrasDocument35 paginiFinite Element Analysis Prof. Dr.B.N.Rao Department of Civil Engineering Indian Institute of Technology, Madrasshrikant belsareÎncă nu există evaluări
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6Document22 paginiAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6abimanaÎncă nu există evaluări
- NPTEL FEM Lec6Document29 paginiNPTEL FEM Lec6EliÎncă nu există evaluări
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15Document25 paginiIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15mahendranÎncă nu există evaluări
- MITOCW - MITRES2 - 002s10linear - Lec07 - 300k-mp4: ProfessorDocument17 paginiMITOCW - MITRES2 - 002s10linear - Lec07 - 300k-mp4: ProfessorZaryan IjazÎncă nu există evaluări
- Vibration and WavesDocument21 paginiVibration and WavessawseeblindÎncă nu există evaluări
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Document19 paginiAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4abimanaÎncă nu există evaluări
- Computational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyDocument31 paginiComputational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyShubhankar Gurav 16210094Încă nu există evaluări
- Lec 6Document11 paginiLec 6haricoolestÎncă nu există evaluări
- Lec4 PDFDocument19 paginiLec4 PDFAbhishek AroraÎncă nu există evaluări
- MITOCW - MITRES2 - 002s10linear - Lec04 - 300k-mp4: ProfessorDocument22 paginiMITOCW - MITRES2 - 002s10linear - Lec04 - 300k-mp4: ProfessorDanielÎncă nu există evaluări
- The Jordan Normal Form and The Euclidean Algorithm - What's NewDocument15 paginiThe Jordan Normal Form and The Euclidean Algorithm - What's NewPratim DeyÎncă nu există evaluări
- Lec 22Document28 paginiLec 22Shreyas Gupta 4-Yr B.Tech. Chemical Engg., IIT (BHU) VaranasiÎncă nu există evaluări
- Uncertainty Principle For DummiesDocument11 paginiUncertainty Principle For Dummiesadelucas5880Încă nu există evaluări
- MITOCW - MITRES2 - 002s10nonlinear - Lec05 - 300k-mp4: ProfessorDocument19 paginiMITOCW - MITRES2 - 002s10nonlinear - Lec05 - 300k-mp4: ProfessorBastian DewiÎncă nu există evaluări
- Classical Mechanics: From Newtonian To Lagrangian FormulationDocument9 paginiClassical Mechanics: From Newtonian To Lagrangian Formulationchirag jainÎncă nu există evaluări
- Lec 21Document27 paginiLec 21SURENDRA PANDAÎncă nu există evaluări
- MITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorDocument24 paginiMITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorBastian DewiÎncă nu există evaluări
- MITOCW - MITRES - 6-007s11lec03 - 300k.mp4: ProfessorDocument16 paginiMITOCW - MITRES - 6-007s11lec03 - 300k.mp4: ProfessorsivatejamundlamuriÎncă nu există evaluări
- Dynamic Response For Continuous SystemsDocument18 paginiDynamic Response For Continuous SystemsDarsHan MoHan0% (1)
- Lec20 PDFDocument12 paginiLec20 PDFRaviÎncă nu există evaluări
- Lec 39Document20 paginiLec 39tamizhanÎncă nu există evaluări
- Harmonic Oscillator II: Damped OscillatorDocument12 paginiHarmonic Oscillator II: Damped Oscillatorpusa123Încă nu există evaluări
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 35Document8 paginiStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 35Dharmendra JainÎncă nu există evaluări
- Lec 8Document39 paginiLec 8GooftilaaAniJiraachuunkooYesusiinÎncă nu există evaluări
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 35Document35 paginiClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 35Anonymous 8f2veZfÎncă nu există evaluări
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 12Document25 paginiClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 12Souvik NaskarÎncă nu există evaluări
- Aero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Document26 paginiAero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Sayan PalÎncă nu există evaluări
- Harmonic Oscillator I: Introduction:) On The Particle VanishesDocument17 paginiHarmonic Oscillator I: Introduction:) On The Particle Vanishespusa123Încă nu există evaluări
- Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1Document19 paginiStructural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1vkagarwaÎncă nu există evaluări
- Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, MadrasDocument27 paginiFinite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madrasnataraj deshpandeÎncă nu există evaluări
- Lec 2Document16 paginiLec 2Sanchita SharmaÎncă nu există evaluări
- Strength of Materials Prof. Sriman K Bhattacharyya IIT Kharagapur Department of Civil EngineeringDocument26 paginiStrength of Materials Prof. Sriman K Bhattacharyya IIT Kharagapur Department of Civil Engineeringnikita chawlaÎncă nu există evaluări
- Lesson 10Document47 paginiLesson 10Shubham SinghÎncă nu există evaluări
- Lec 14Document13 paginiLec 14Janaki RamanÎncă nu există evaluări
- Equivalent Nodal ValuesDocument27 paginiEquivalent Nodal Values1005641Încă nu există evaluări
- Structural Analysis - II Prof. P. Banerjee Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 05Document14 paginiStructural Analysis - II Prof. P. Banerjee Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 05Thiaga RajanÎncă nu există evaluări
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11Document25 paginiAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11abimanaÎncă nu există evaluări
- Lec 15Document17 paginiLec 15mybestfriendgrewalÎncă nu există evaluări
- Dynamics of Machines Prof - Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument16 paginiDynamics of Machines Prof - Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurIshu GoelÎncă nu există evaluări
- 3 Newton's LawsDocument3 pagini3 Newton's LawsOmar Mostafa Hussien ヅÎncă nu există evaluări
- Separation of VariablesDocument6 paginiSeparation of VariablesMary Faith LopezÎncă nu există evaluări
- Rotational Motion Engineering Mechanics IIT KanpurDocument67 paginiRotational Motion Engineering Mechanics IIT KanpurNitin SharmaÎncă nu există evaluări
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 paginiIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranÎncă nu există evaluări
- Basic Thermodynamics Video To Text Lecture 15 NptelDocument32 paginiBasic Thermodynamics Video To Text Lecture 15 NptelKart01Încă nu există evaluări
- On The Contradictions of EDocument4 paginiOn The Contradictions of ESehar AslamÎncă nu există evaluări
- Lec 15Document17 paginiLec 15shashankÎncă nu există evaluări
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Document25 paginiIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4mahendranÎncă nu există evaluări
- 3 Lec3Document18 pagini3 Lec3Shahzaib Anwar OffÎncă nu există evaluări
- Lec 10Document24 paginiLec 10mahendranÎncă nu există evaluări
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 02 Lecture - 01 Plane Trusses - IDocument30 paginiEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 02 Lecture - 01 Plane Trusses - Ilechu-92Încă nu există evaluări
- MITOCW - MITRES2 - 002s10nonlinear - Lec13 - 300k-mp4: ProfessorDocument17 paginiMITOCW - MITRES2 - 002s10nonlinear - Lec13 - 300k-mp4: ProfessorBastian DewiÎncă nu există evaluări
- MITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorDocument24 paginiMITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorBastian DewiÎncă nu există evaluări
- MITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorDocument15 paginiMITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorBastian DewiÎncă nu există evaluări
- MITOCW - MITRES2 - 002s10nonlinear - Lec05 - 300k-mp4: ProfessorDocument19 paginiMITOCW - MITRES2 - 002s10nonlinear - Lec05 - 300k-mp4: ProfessorBastian DewiÎncă nu există evaluări
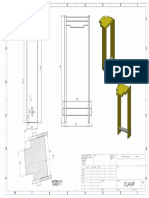
- Clamp - Sheet1 PDFDocument1 paginăClamp - Sheet1 PDFBastian DewiÎncă nu există evaluări
- Clamp - Sheet1Document1 paginăClamp - Sheet1Bastian DewiÎncă nu există evaluări
- Performance of 2d Frame OptimizationDocument21 paginiPerformance of 2d Frame OptimizationBastian DewiÎncă nu există evaluări
- QHADocument82 paginiQHABastian DewiÎncă nu există evaluări
- Plat Atas - Sheet1Document1 paginăPlat Atas - Sheet1Bastian DewiÎncă nu există evaluări
- Algorithm Correctness and Time ComplexityDocument36 paginiAlgorithm Correctness and Time Complexityfor_booksÎncă nu există evaluări
- Synctool LogDocument52 paginiSynctool LogAmmarÎncă nu există evaluări
- RICAMBI HX10M - 2008 - l540Document6 paginiRICAMBI HX10M - 2008 - l540Luca FroliÎncă nu există evaluări
- EN 61800-100 UserManual 1905Document176 paginiEN 61800-100 UserManual 1905Tikal TikaldromedariusÎncă nu există evaluări
- Manual ViscosímetroDocument138 paginiManual Viscosímetroluigi_mazzucco50% (2)
- Golden Motor - BLDC MotorsDocument4 paginiGolden Motor - BLDC MotorsEduardo BarbieriÎncă nu există evaluări
- Linux Networking Cheat SheetDocument3 paginiLinux Networking Cheat SheetPankaj GuptaÎncă nu există evaluări
- Merits and Demerits of Arithemetic MeanDocument10 paginiMerits and Demerits of Arithemetic Meantarun86% (7)
- Curriculum Vitae: Executive Summary & Covering LetterDocument9 paginiCurriculum Vitae: Executive Summary & Covering LetterKhalid MahmoodÎncă nu există evaluări
- Draft Spec. For Set of Panels For LHB Non AC EOG Coaches PDFDocument27 paginiDraft Spec. For Set of Panels For LHB Non AC EOG Coaches PDFVishal Kinikar0% (1)
- As350-200m-1 Rev 10 1-14-21Document63 paginiAs350-200m-1 Rev 10 1-14-21Carolina Ross100% (1)
- 3ADW000379R0301 DCS550 Manual e CDocument310 pagini3ADW000379R0301 DCS550 Manual e CLaura SelvaÎncă nu există evaluări
- Probability 4Document28 paginiProbability 4MAHESH.RÎncă nu există evaluări
- TVL CSS8 Q3 M4Document18 paginiTVL CSS8 Q3 M4Ellen SantinellerÎncă nu există evaluări
- Kopijahe (SFILEDocument2 paginiKopijahe (SFILEAde NurkamalÎncă nu există evaluări
- GroupD ManualDocument24 paginiGroupD ManualTerminal VelocityÎncă nu există evaluări
- Interfacing A Hantronix 320 X 240 Graphics Module To An 8-Bit MicrocontrollerDocument8 paginiInterfacing A Hantronix 320 X 240 Graphics Module To An 8-Bit MicrocontrollerAnonymous roFhLslwIFÎncă nu există evaluări
- VFC Manual PDFDocument28 paginiVFC Manual PDFFikret DavudovÎncă nu există evaluări
- SF EC Position Management enDocument154 paginiSF EC Position Management enAli Husain IbrahimÎncă nu există evaluări
- OSI Model EssayDocument9 paginiOSI Model EssayKyle BeestMode Lynch100% (1)
- Research Papers On Network Security AttacksDocument6 paginiResearch Papers On Network Security AttackshbkgbsundÎncă nu există evaluări
- Chapter 2: Decision Making, Systems, Modeling, and SupportDocument75 paginiChapter 2: Decision Making, Systems, Modeling, and Supportjanagyrama1Încă nu există evaluări
- Using JAXB For XML With Java - DZone JavaDocument20 paginiUsing JAXB For XML With Java - DZone JavajaehooÎncă nu există evaluări
- LED ButtonDocument14 paginiLED Buttonlabirint10Încă nu există evaluări
- Extreme ValidationDocument11 paginiExtreme ValidationJose Pardo Vera-TudelaÎncă nu există evaluări
- LCP - Macatcatud PS School Year 2021-2022Document7 paginiLCP - Macatcatud PS School Year 2021-2022Geoff ReyÎncă nu există evaluări
- Documents For Working - AmpleforthDocument70 paginiDocuments For Working - AmpleforthSpontan GezginÎncă nu există evaluări
- Cs I PR II MQPDocument2 paginiCs I PR II MQPr6180463Încă nu există evaluări
- Online Voting System SRSDocument7 paginiOnline Voting System SRSSanthosh KumarÎncă nu există evaluări
- M3u Playlist 2022Document9 paginiM3u Playlist 2022Carlos DanelonÎncă nu există evaluări
- Cyber War: The Next Threat to National Security and What to Do About ItDe la EverandCyber War: The Next Threat to National Security and What to Do About ItEvaluare: 3.5 din 5 stele3.5/5 (66)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDe la EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldEvaluare: 4.5 din 5 stele4.5/5 (55)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyDe la EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyEvaluare: 3.5 din 5 stele3.5/5 (111)
- Algorithms to Live By: The Computer Science of Human DecisionsDe la EverandAlgorithms to Live By: The Computer Science of Human DecisionsEvaluare: 4.5 din 5 stele4.5/5 (722)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityDe la EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityEvaluare: 5 din 5 stele5/5 (1)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDe la EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveÎncă nu există evaluări
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDe la EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessÎncă nu există evaluări
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectDe la EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectEvaluare: 4.5 din 5 stele4.5/5 (20)
- Generative AI: The Insights You Need from Harvard Business ReviewDe la EverandGenerative AI: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (2)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDe la EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldEvaluare: 4.5 din 5 stele4.5/5 (107)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewDe la EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (104)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (227)
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesDe la EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesÎncă nu există evaluări
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziDe la Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziÎncă nu există evaluări
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceDe la EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceÎncă nu există evaluări
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideDe la EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideEvaluare: 5 din 5 stele5/5 (2)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)De la EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Evaluare: 4 din 5 stele4/5 (1)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesDe la EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesEvaluare: 4.5 din 5 stele4.5/5 (13)
- Dark Data: Why What You Don’t Know MattersDe la EverandDark Data: Why What You Don’t Know MattersEvaluare: 4.5 din 5 stele4.5/5 (3)
- AI Prompting Mastery: Strategies and Techniques for Effective PromptingDe la EverandAI Prompting Mastery: Strategies and Techniques for Effective PromptingÎncă nu există evaluări
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.De la EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Evaluare: 5 din 5 stele5/5 (34)