S-ar putea să vă placă și
- ComputationalAstrophysicsL6 PDFDocument20 paginiComputationalAstrophysicsL6 PDFAlirezakhÎncă nu există evaluări
- Application of Modified Hopfield Neural Network To Real Time Current Harmonics ReductionDocument8 paginiApplication of Modified Hopfield Neural Network To Real Time Current Harmonics ReductionARVINDÎncă nu există evaluări
- SPH Modeling Using LS DynaDocument6 paginiSPH Modeling Using LS DynaBarath SundarÎncă nu există evaluări
- III - B - 1 - C - 2014 AUNSEED - 2Document7 paginiIII - B - 1 - C - 2014 AUNSEED - 2Dr. Kuswandi ST.,MTÎncă nu există evaluări
- Rowlands 2022 J. Phys. Conf. Ser. 2197 012023Document11 paginiRowlands 2022 J. Phys. Conf. Ser. 2197 012023asdfgffÎncă nu există evaluări
- Split Hopkinson Pressure Bar Graphical Analysis ToolDocument5 paginiSplit Hopkinson Pressure Bar Graphical Analysis Toolotipicni6969Încă nu există evaluări
- Generic Model For Multi-Phase Ring Oscillators: Member Member Senior Member, Ieee Senior Member, IEEEDocument4 paginiGeneric Model For Multi-Phase Ring Oscillators: Member Member Senior Member, Ieee Senior Member, IEEENguyen Van ToanÎncă nu există evaluări
- Density Functional TheoryDocument34 paginiDensity Functional TheoryChang Jae LeeÎncă nu există evaluări
- Parallel Computing Chapter 7 Performance and Scalability: Jun Zhang Department of Computer Science University of KentuckyDocument26 paginiParallel Computing Chapter 7 Performance and Scalability: Jun Zhang Department of Computer Science University of KentuckyWidya MeiriskaÎncă nu există evaluări
- Lab 4 Multi Mode Optical Fiber QuestionsDocument10 paginiLab 4 Multi Mode Optical Fiber Questionsshivanshu.siyanwalÎncă nu există evaluări
- Brad - Hubartt DFT SoftwareDocument5 paginiBrad - Hubartt DFT SoftwareFaheem RajuÎncă nu există evaluări
- Neural Ordinary Differential Equations: Ricky T. Q. Chen, Yulia Rubanova, Jesse Bettencourt, David DuvenaudDocument42 paginiNeural Ordinary Differential Equations: Ricky T. Q. Chen, Yulia Rubanova, Jesse Bettencourt, David DuvenaudGabriel LÎncă nu există evaluări
- Adityo 2020 J. Phys. Conf. Ser. 1511 012074Document11 paginiAdityo 2020 J. Phys. Conf. Ser. 1511 012074HendratoÎncă nu există evaluări
- Chapter Parallel Prefix SumDocument21 paginiChapter Parallel Prefix SumAimee ReynoldsÎncă nu există evaluări
- Advanced Data Analytics: Simon Scheidegger - University of Lausanne, Department of EconomicsDocument50 paginiAdvanced Data Analytics: Simon Scheidegger - University of Lausanne, Department of EconomicsRuben KempterÎncă nu există evaluări
- Lect 04Document73 paginiLect 04zhiqian wangÎncă nu există evaluări
- Quantum Espresso Inputfile ExplantionDocument31 paginiQuantum Espresso Inputfile ExplantionPHYSICS PROBLEMSÎncă nu există evaluări
- Report - Viber StringDocument26 paginiReport - Viber StringLopUiÎncă nu există evaluări
- 3F3 3 Fast Fourier TransformDocument50 pagini3F3 3 Fast Fourier TransformChalani PremadasaÎncă nu există evaluări
- Problems 02Document2 paginiProblems 02Raghu AchukolaÎncă nu există evaluări
- Bulk EuHfO3 From First PrinciplesDocument6 paginiBulk EuHfO3 From First PrinciplesMaycol AvalosÎncă nu există evaluări
- Computers and Mathematics With ApplicationsDocument10 paginiComputers and Mathematics With Applicationsalireza khoshnoodÎncă nu există evaluări
- DCA7104 Analysis and Design of AlgorithmsDocument12 paginiDCA7104 Analysis and Design of Algorithmsarmaan rathoreÎncă nu există evaluări
- Svyatoslav Covanov Rapport de Stage Recherche 2014Document25 paginiSvyatoslav Covanov Rapport de Stage Recherche 2014BoppidiSrikanthÎncă nu există evaluări
- 6 DFT-walkthrough PDFDocument10 pagini6 DFT-walkthrough PDFIsmael Antonio Gonzalez RamirezÎncă nu există evaluări
- AIAA 99-0934: A Second Law Based Unstructured Finite Volume Procedure For Generalized Flow SimulationDocument24 paginiAIAA 99-0934: A Second Law Based Unstructured Finite Volume Procedure For Generalized Flow SimulationDaniel SimÎncă nu există evaluări
- Algorithm PDFDocument54 paginiAlgorithm PDFPrakash SinghÎncă nu există evaluări
- Pinns - 1dheatequationexample: 1 OverviewDocument30 paginiPinns - 1dheatequationexample: 1 OverviewHari Madhavan Krishna KumarÎncă nu există evaluări
- Factorisation MemoireDocument21 paginiFactorisation MemoireivanarcilaÎncă nu există evaluări
- Phonon Cal in Quantum Espresso&filesDocument54 paginiPhonon Cal in Quantum Espresso&filessasdudeÎncă nu există evaluări
- Lect 04Document73 paginiLect 04zhiqian wangÎncă nu există evaluări
- The Stress Analysis - FEMDocument41 paginiThe Stress Analysis - FEMCristian Ioan ȚimbolmașÎncă nu există evaluări
- Parallel Methods For Nano/Materials Science Applications: (Electronic Structure Calculations)Document29 paginiParallel Methods For Nano/Materials Science Applications: (Electronic Structure Calculations)Liviu BadeaÎncă nu există evaluări
- Explicit Dynamics IntroDocument17 paginiExplicit Dynamics IntroRAJESH SIMHADRIÎncă nu există evaluări
- Parallel PdeDocument11 paginiParallel PdeDian Neuro-Fuzzy NuraimanÎncă nu există evaluări
- NG - Argument Reduction For Huge Arguments: Good To The Last BitDocument8 paginiNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorÎncă nu există evaluări
- Estimation of Parameters of Under-Damped Second Order Plus Dead Time Processes Using Relay FeedbackDocument6 paginiEstimation of Parameters of Under-Damped Second Order Plus Dead Time Processes Using Relay FeedbackNima Vahidian BaraniÎncă nu există evaluări
- Kernels Regularization and Differential EquationsDocument16 paginiKernels Regularization and Differential EquationsAniAceÎncă nu există evaluări
- CS 224n Assignment #3: Dependency Parsing: 1. Machine Learning & Neural Networks (8 Points)Document7 paginiCS 224n Assignment #3: Dependency Parsing: 1. Machine Learning & Neural Networks (8 Points)progisÎncă nu există evaluări
- CP Tutorial1Document6 paginiCP Tutorial1naruatÎncă nu există evaluări
- NRK ParaSolDocument14 paginiNRK ParaSolLuis ArreguinÎncă nu există evaluări
- Tutorial (Advanced Programming) Worksheet 9:: Assignment 1: MultigridDocument2 paginiTutorial (Advanced Programming) Worksheet 9:: Assignment 1: MultigridhisuinÎncă nu există evaluări
- Introduction To Broadband Processing With MatlabDocument24 paginiIntroduction To Broadband Processing With MatlabBOKO-HAYA D. DidierÎncă nu există evaluări
- Assign ProDocument3 paginiAssign ProRajesh ShuklaÎncă nu există evaluări
- Pasta: Python Algorithms For Searching Transition States: A B B, ADocument24 paginiPasta: Python Algorithms For Searching Transition States: A B B, Araju devÎncă nu există evaluări
- Area Trade Off FplanDocument4 paginiArea Trade Off FplanpankajmudgilÎncă nu există evaluări
- Group Delay Engineering Using Cascaded All Pass Filters For Wideband Chirp Waveform GenerationDocument6 paginiGroup Delay Engineering Using Cascaded All Pass Filters For Wideband Chirp Waveform GenerationRigo MartinezÎncă nu există evaluări
- 4.1 Jakes+Fading+Model+RevisitedDocument2 pagini4.1 Jakes+Fading+Model+Revisitedziad2112008Încă nu există evaluări
- Accurate Multiple-Precision Gauss-Legendre Quadrature - Laurent Fousse - July 2007Document9 paginiAccurate Multiple-Precision Gauss-Legendre Quadrature - Laurent Fousse - July 2007RMolina65Încă nu există evaluări
- Nonlinear Analysis of Cable Structures by PDFDocument7 paginiNonlinear Analysis of Cable Structures by PDFmorteza90Încă nu există evaluări
- CS60010: Deep Learning: Recurrent Neural NetworkDocument44 paginiCS60010: Deep Learning: Recurrent Neural Networkparantap dansanaÎncă nu există evaluări
- Recurrent Nested Model For Sequence Generation: Wenhao Jiang, Lin Ma, Wei LuDocument8 paginiRecurrent Nested Model For Sequence Generation: Wenhao Jiang, Lin Ma, Wei LuAdmissionofficer kbgÎncă nu există evaluări
- Wave RNNDocument7 paginiWave RNNYilei zhangÎncă nu există evaluări
- An Optimal Parallel Jacobi-Like Solution Method For The Singular Value DecompositionDocument7 paginiAn Optimal Parallel Jacobi-Like Solution Method For The Singular Value Decompositionshock643Încă nu există evaluări
- Hindi To French AnkurDocument6 paginiHindi To French AnkurBalpreet KaurÎncă nu există evaluări
- R: T E T: Eformer HE Fficient RansformerDocument12 paginiR: T E T: Eformer HE Fficient RansformerIslah GsmÎncă nu există evaluări
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningDe la EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Lid Driven CavityDocument9 paginiLid Driven CavityCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- ANTUONO ANDREA COLAGROSSI Numerical Diffusive Terms in Weakly-CompDocument24 paginiANTUONO ANDREA COLAGROSSI Numerical Diffusive Terms in Weakly-CompCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- Diffusive Terms Applied in Smoothed Particle Hydrodynamics Simulations of Incompressible and Isothermal Newtonian Fluid FlowsDocument63 paginiDiffusive Terms Applied in Smoothed Particle Hydrodynamics Simulations of Incompressible and Isothermal Newtonian Fluid FlowsCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- DALRYMPLE, ROGERS Numerical Modeling of Water Waves With The SPH MethodDocument7 paginiDALRYMPLE, ROGERS Numerical Modeling of Water Waves With The SPH MethodCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- Momentum Conserving Methods That Reduce Particle Clustering in SPHDocument24 paginiMomentum Conserving Methods That Reduce Particle Clustering in SPHCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- RogersDalrymple TsunamisDocument27 paginiRogersDalrymple TsunamisCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- ZHANG Smoothed Particle Hydrodynamics and Its Applications in Fluid-Structure InteractionsDocument31 paginiZHANG Smoothed Particle Hydrodynamics and Its Applications in Fluid-Structure InteractionsCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- Modelling of Tsunami-Like Wave Run-Up Breaking andDocument11 paginiModelling of Tsunami-Like Wave Run-Up Breaking andCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- The Surface Marker and Micro Cell MethodDocument30 paginiThe Surface Marker and Micro Cell MethodCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- Silvester Wave-Structure - Interaction - Using - Smoothed - ParticleDocument9 paginiSilvester Wave-Structure - Interaction - Using - Smoothed - ParticleCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- Experimental Investigation of Tsunami Impact On Free Standing StructuresDocument29 paginiExperimental Investigation of Tsunami Impact On Free Standing StructuresCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- Numerical Modelling of Tsunami Bore Impact On LowDocument8 paginiNumerical Modelling of Tsunami Bore Impact On LowCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- HATTORI Wave Impact Pressure On Vertical Walls UnderDocument36 paginiHATTORI Wave Impact Pressure On Vertical Walls UnderCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- ENVIRONMENTAL SCIENCE Hazbavi2020 Article SpatialAndTemporalAnalysisOfThDocument11 paginiENVIRONMENTAL SCIENCE Hazbavi2020 Article SpatialAndTemporalAnalysisOfThCarlos Alberto Dutra Fraga FilhoÎncă nu există evaluări
- Fea Question With Class Notes and Formula BookDocument375 paginiFea Question With Class Notes and Formula BookAshok Kumar Rajendran96% (117)
- Information Sciences: Decui Liang, Bochun YiDocument18 paginiInformation Sciences: Decui Liang, Bochun YiRico Bayu WiranataÎncă nu există evaluări
- Computational Linguistics: Lecture 1: IntroductionDocument25 paginiComputational Linguistics: Lecture 1: IntroductionDalia AhmedÎncă nu există evaluări
- Allen Kyle ResumeDocument2 paginiAllen Kyle ResumeJB July SantanderÎncă nu există evaluări
- AbstractDocument10 paginiAbstractDyna Lucero LimpiosÎncă nu există evaluări
- Electronics: Serial Expansion Using 74HC4052Document4 paginiElectronics: Serial Expansion Using 74HC4052Leonel FonsecaÎncă nu există evaluări
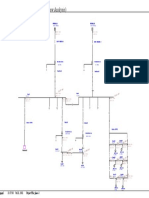
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDocument1 paginăOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderÎncă nu există evaluări
- DM-HROD-2021-0340 Central Office Learning and Development Program COLDP Program Offerings For DepEd CO Personnel1Document2 paginiDM-HROD-2021-0340 Central Office Learning and Development Program COLDP Program Offerings For DepEd CO Personnel1Nestor DawatonÎncă nu există evaluări
- Modern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012Document3 paginiModern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012srini_792002Încă nu există evaluări
- Frame DetailsDocument15 paginiFrame DetailsDora BAÎncă nu există evaluări
- THEORY For Wein Bridge Oscillator Using Ic 741 Op AmpDocument1 paginăTHEORY For Wein Bridge Oscillator Using Ic 741 Op AmpPurnima Sri Sai100% (1)
- MSD 26 PDFDocument146 paginiMSD 26 PDFxana_sweetÎncă nu există evaluări
- ISDN User PartDocument7 paginiISDN User Partomjaijagdish.raiÎncă nu există evaluări
- Introduction To Data Mining - Rev PDFDocument1 paginăIntroduction To Data Mining - Rev PDFlhy20283Încă nu există evaluări
- Backing Up A Domain and Upgrading Weblogic ServerDocument27 paginiBacking Up A Domain and Upgrading Weblogic ServerNetting NichoÎncă nu există evaluări
- 027 Result Btech 7th Sem Jan 2023Document239 pagini027 Result Btech 7th Sem Jan 2023Vaibhav TiwariÎncă nu există evaluări
- Exercises 1 Systems of Linear Equations, MatricesDocument2 paginiExercises 1 Systems of Linear Equations, MatricesNgô Anh TúÎncă nu există evaluări
- O Ring Vacuum SealingDocument15 paginiO Ring Vacuum SealingManoj SundararajanÎncă nu există evaluări
- WK 3 PE 3032 TF Signal Flow Graphs Mason Ed0314Document38 paginiWK 3 PE 3032 TF Signal Flow Graphs Mason Ed0314gashawletaÎncă nu există evaluări
- Decision Analysis Using Microsoft Excel PDFDocument400 paginiDecision Analysis Using Microsoft Excel PDFimran_chaudhryÎncă nu există evaluări
- Intelligent Addressable Fire Alarm System: GeneralDocument10 paginiIntelligent Addressable Fire Alarm System: Generaleduardo gonzalezavÎncă nu există evaluări
- IDOCs (For Functional Consultants - Set Up & Trouble Shooting)Document33 paginiIDOCs (For Functional Consultants - Set Up & Trouble Shooting)Rajat Kapoor100% (1)
- 1 Prolog 01-06-2012Document5 pagini1 Prolog 01-06-2012A B M Moniruzzaman KhanÎncă nu există evaluări
- Terex Elrest SPSDocument20 paginiTerex Elrest SPSLuis jopi50% (2)
- KeralaDocument514 paginiKeralaGayathriÎncă nu există evaluări
- 10 Computer Applications-Cyber Ethics (Part 1) - NotesDocument4 pagini10 Computer Applications-Cyber Ethics (Part 1) - NotesSAVITAR GAMINGÎncă nu există evaluări
- General Science & Ability - Past Papers AnalysisDocument22 paginiGeneral Science & Ability - Past Papers AnalysisAmeena AimenÎncă nu există evaluări
- Case Study The Waterfall Model and The Agile MethodologiesDocument7 paginiCase Study The Waterfall Model and The Agile MethodologiesFekadu AlemayhuÎncă nu există evaluări
- Epicor ERP Inventory Transactions Technical Reference GuideDocument88 paginiEpicor ERP Inventory Transactions Technical Reference GuideVMRO100% (1)
- B.Tech (PT) - Mathematics - II YEAR - III SEM - (R) 2012 PDFDocument15 paginiB.Tech (PT) - Mathematics - II YEAR - III SEM - (R) 2012 PDFmohamed irshadÎncă nu există evaluări