S-ar putea să vă placă și
- Passive Flow Control in Liquid-Propellant Rocket Engines With Cavitating VenturiDocument5 paginiPassive Flow Control in Liquid-Propellant Rocket Engines With Cavitating VenturilavanyaÎncă nu există evaluări
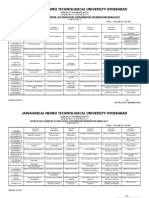
- Jawaharlal Nehru Technological University HyderabadDocument3 paginiJawaharlal Nehru Technological University HyderabadlavanyaÎncă nu există evaluări
- Topic-06a 2009Document13 paginiTopic-06a 2009lavanyaÎncă nu există evaluări
- World: Jawaharlal Nehru Technological University HyderabadDocument11 paginiWorld: Jawaharlal Nehru Technological University HyderabadlavanyaÎncă nu există evaluări
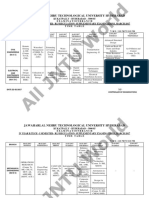
- Jawaharlal Nehru Technological University HyderabadDocument3 paginiJawaharlal Nehru Technological University HyderabadlavanyaÎncă nu există evaluări
- HussainDocument1 paginăHussainlavanyaÎncă nu există evaluări
- Desing and Analysis of Alloy Wheels by Using AnsysDocument33 paginiDesing and Analysis of Alloy Wheels by Using Ansyslavanya0% (1)
- Design and Structural Analysis of Single Plate Friction ClutchDocument1 paginăDesign and Structural Analysis of Single Plate Friction ClutchlavanyaÎncă nu există evaluări
- Drinking Water Research Foundation Compares Bottled, Tap WaterDocument22 paginiDrinking Water Research Foundation Compares Bottled, Tap WaterlavanyaÎncă nu există evaluări
- TSRTC Bus PassDocument2 paginiTSRTC Bus PasslavanyaÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- UNITDocument4 paginiUNITHarshJindalÎncă nu există evaluări
- Del Cos 3000Document12 paginiDel Cos 3000aryluck77Încă nu există evaluări
- Tugas Ii ThermodinamicsDocument7 paginiTugas Ii ThermodinamicsAdi Dangan MuktiÎncă nu există evaluări
- Partial Discharge Theory and Applications To Electrical SystemsDocument15 paginiPartial Discharge Theory and Applications To Electrical SystemsjonathanmartinÎncă nu există evaluări
- COMPRO Bintang AuroraDocument26 paginiCOMPRO Bintang AurorabintangÎncă nu există evaluări
- MSZ-FH09-15NA Operation JG79A806H02 03-14Document44 paginiMSZ-FH09-15NA Operation JG79A806H02 03-14JordanÎncă nu există evaluări
- Lanchshire BoilerDocument13 paginiLanchshire Boilerkarthik2468Încă nu există evaluări
- Basic Tuning 101: Air Fuel RatioDocument14 paginiBasic Tuning 101: Air Fuel RatioBronwynne OctoberÎncă nu există evaluări
- Discussions: 1. Calculate The Heat Loss and Efficiency For Both Co-Current and Counter Current Processes. Heat Loss, QDocument7 paginiDiscussions: 1. Calculate The Heat Loss and Efficiency For Both Co-Current and Counter Current Processes. Heat Loss, Qrei ayanamiÎncă nu există evaluări
- Business Plan On Fly Ash Bricks: "An Environment Friendly Project"Document15 paginiBusiness Plan On Fly Ash Bricks: "An Environment Friendly Project"Vignesh Kumar NagarajanÎncă nu există evaluări
- Submitted To: Miss Iqra Mujtaba Submitted By: Nuzhat Aslam Roll No 837 Semester: 03Document3 paginiSubmitted To: Miss Iqra Mujtaba Submitted By: Nuzhat Aslam Roll No 837 Semester: 03Nimi MalikÎncă nu există evaluări
- SIPROTEC Compact Protection Systems A1 enDocument168 paginiSIPROTEC Compact Protection Systems A1 enMarcelo MagriÎncă nu există evaluări
- Photoelectron SpectrosDocument16 paginiPhotoelectron SpectrosAditiÎncă nu există evaluări
- Redox Reaction Introduction and Discussion of Theories: Oxidation-Reduction ReactionsDocument9 paginiRedox Reaction Introduction and Discussion of Theories: Oxidation-Reduction ReactionsMark Darrel AquinoÎncă nu există evaluări
- LectureDocument46 paginiLecturedjjunel2000Încă nu există evaluări
- Resin Infusion MoldingDocument111 paginiResin Infusion MoldingAnkitChoudhary100% (2)
- Liebert Gxt4 5kva 10kvaDocument50 paginiLiebert Gxt4 5kva 10kvaAllamÎncă nu există evaluări
- Lesson 2 Commercial Refrigeration and Airconditioning TypesDocument41 paginiLesson 2 Commercial Refrigeration and Airconditioning TypesEddie AbugÎncă nu există evaluări
- Characterization of Surface Deposits On Human HairDocument12 paginiCharacterization of Surface Deposits On Human HairpigcognitoÎncă nu există evaluări
- Sosialisasi Tokped - Apr - Jun '21Document9 paginiSosialisasi Tokped - Apr - Jun '21KaiserÎncă nu există evaluări
- Minisplit Lennox r22 R410a 10seer PDFDocument4 paginiMinisplit Lennox r22 R410a 10seer PDFJulian Andres Moreno0% (1)
- Deputy Engineer ElectricalDocument3 paginiDeputy Engineer ElectricalSargi BeepumohanÎncă nu există evaluări
- 2016 Zapata Hincapie John Alexander ThesisDocument84 pagini2016 Zapata Hincapie John Alexander ThesisbetelgueseÎncă nu există evaluări
- Referencias Electrodos FujikuraDocument1 paginăReferencias Electrodos FujikuraAlexander GuzmanÎncă nu există evaluări
- Commodity Chemicals - PPT - June2023Document40 paginiCommodity Chemicals - PPT - June2023Sheikh YajidulÎncă nu există evaluări
- Edited Light - Particle or A Wave ArticleDocument5 paginiEdited Light - Particle or A Wave Articleapi-253993915Încă nu există evaluări
- Determination of Certified Relieving CapacitiesDocument6 paginiDetermination of Certified Relieving CapacitiesGustavo GarciaÎncă nu există evaluări
- Apb Calculation (Natural Gas)Document8 paginiApb Calculation (Natural Gas)Nasrul HazimÎncă nu există evaluări
- For ELECTRICAL TESTING LABORATORIES - The NABL (PDFDrive)Document122 paginiFor ELECTRICAL TESTING LABORATORIES - The NABL (PDFDrive)Mani Dhamodharan100% (1)
- TV LG 55EC9300+OLED+SMPS+TestingDocument6 paginiTV LG 55EC9300+OLED+SMPS+Testingwanderson wendellÎncă nu există evaluări