S-ar putea să vă placă și
- Different Modeling Aspects and Energy Systems of Unified Power Quality Conditioner (UPQC) - An Overview (#168251) - 148354Document8 paginiDifferent Modeling Aspects and Energy Systems of Unified Power Quality Conditioner (UPQC) - An Overview (#168251) - 148354Marshallchiyan PhilipÎncă nu există evaluări
- UPQCDocument12 paginiUPQCG Vignesh GvsÎncă nu există evaluări
- Power Quality Improvement Using Unified Power Quality ConditionerDocument47 paginiPower Quality Improvement Using Unified Power Quality ConditionerAngamuthu AnanthÎncă nu există evaluări
- Comparison of PI and ANN Control Techniques For Nine Switches UPQC To Improve Power QualityDocument17 paginiComparison of PI and ANN Control Techniques For Nine Switches UPQC To Improve Power Qualitysubanishaik100% (1)
- Design of Unified Power Quality Conditioner (UPQC)Document7 paginiDesign of Unified Power Quality Conditioner (UPQC)Hari PrasadÎncă nu există evaluări
- Operational AmplifiersDocument49 paginiOperational AmplifiersKostas TressosÎncă nu există evaluări
- Dual InputDocument5 paginiDual InputPrempal TomarÎncă nu există evaluări
- (385694872) Seminar ReportDocument26 pagini(385694872) Seminar ReportJothsna PraveenaÎncă nu există evaluări
- Linear and Digital Integrated Circuits: Uni T - 1 Operati Onal Ampli FierDocument116 paginiLinear and Digital Integrated Circuits: Uni T - 1 Operati Onal Ampli FierBOGGULA SURENDAR REDDYÎncă nu există evaluări
- Presentation On Analog ElectronicsDocument334 paginiPresentation On Analog ElectronicssamuelÎncă nu există evaluări
- Analog Circuits: A. A. Lande, E & TC DeptDocument96 paginiAnalog Circuits: A. A. Lande, E & TC DeptvmspraneethÎncă nu există evaluări
- Op Amp 2Document26 paginiOp Amp 2krishÎncă nu există evaluări
- Load Flow AnalysisDocument12 paginiLoad Flow AnalysisHendra Dwi RamadhanÎncă nu există evaluări
- III Eee 05 Ee8501 Psa Unit 1Document37 paginiIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANÎncă nu există evaluări
- Literature Survey On Smart Grid SimulationDocument5 paginiLiterature Survey On Smart Grid SimulationAbinaya UlagapaÎncă nu există evaluări
- Bef 23903 - Chapter 3 - DC Bridge - Wheatstone BridgeDocument19 paginiBef 23903 - Chapter 3 - DC Bridge - Wheatstone BridgeMuhammad Izz IzzuddinÎncă nu există evaluări
- Poc NotesDocument107 paginiPoc NotesaaparumugamÎncă nu există evaluări
- EE - 151 - Lecture - 1 Bus Admittance MatrixDocument17 paginiEE - 151 - Lecture - 1 Bus Admittance MatrixBiboy AdsuaraÎncă nu există evaluări
- "Steady-State Modeling and Simulation of A Distribution Feeder With Distributed Energy Resources in A Real-Time Digital Simulation Environment PDFDocument88 pagini"Steady-State Modeling and Simulation of A Distribution Feeder With Distributed Energy Resources in A Real-Time Digital Simulation Environment PDFEynher Abel RiascosÎncă nu există evaluări
- Voltage Source InverterDocument77 paginiVoltage Source InverterSaied Aly SalamahÎncă nu există evaluări
- Data Structures and Algorithm: Avl TreeDocument42 paginiData Structures and Algorithm: Avl TreeSarah FatimaÎncă nu există evaluări
- Ee101 Opamp 1Document85 paginiEe101 Opamp 1Ankur SinghÎncă nu există evaluări
- OPAL-RT How-To Video and Quick Start Guide Links (Updated Feb 2019)Document5 paginiOPAL-RT How-To Video and Quick Start Guide Links (Updated Feb 2019)Ram Mohan Rao MakineniÎncă nu există evaluări
- Electronics Analog OPAMPDocument51 paginiElectronics Analog OPAMPPrashant SachdevÎncă nu există evaluări
- Psim Interface Opal RTDocument33 paginiPsim Interface Opal RTtvs_krishnavarmaÎncă nu există evaluări
- Unit 1: The Power System Overview and ModelingDocument8 paginiUnit 1: The Power System Overview and ModelingIhuhwa Marta TauÎncă nu există evaluări
- Differential AmplifierDocument15 paginiDifferential AmplifierrppvchÎncă nu există evaluări
- Lecture 7Document33 paginiLecture 7Mohamad SyazwanÎncă nu există evaluări
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDocument6 paginiOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraÎncă nu există evaluări
- 11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeDocument29 pagini11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeThanh LeÎncă nu există evaluări
- Structure of Power SystemDocument60 paginiStructure of Power SystemDamodharan ChandranÎncă nu există evaluări
- Chapter 7 Lecture PowerPointDocument33 paginiChapter 7 Lecture PowerPointkyrwel100% (1)
- Touch Door Bell Alram SystemDocument18 paginiTouch Door Bell Alram SystemAnudeep NaiduÎncă nu există evaluări
- 271 - PH8252 Physics For Information Science - Notes UNIT IV OPTICAL PROPERTIES OF MATERIALS PDFDocument66 pagini271 - PH8252 Physics For Information Science - Notes UNIT IV OPTICAL PROPERTIES OF MATERIALS PDFHari100% (1)
- DADocument40 paginiDAkrishneel sharmaÎncă nu există evaluări
- Monostable MultivibratorDocument15 paginiMonostable MultivibratorHema SundarÎncă nu există evaluări
- EE6611-Power Electronics and Drives LaboratoryDocument136 paginiEE6611-Power Electronics and Drives Laboratoryswathi100% (1)
- Circuit TheoryDocument57 paginiCircuit TheoryArunmozhi Sinouvassane67% (3)
- A Novel ZVS-ZCS Bi-Directional Flyback DC-DCDocument6 paginiA Novel ZVS-ZCS Bi-Directional Flyback DC-DCArceu CamposÎncă nu există evaluări
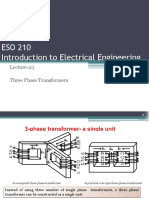
- Transformers - Three Phase TransformersDocument25 paginiTransformers - Three Phase TransformersDeepakDeep100% (1)
- Part IV OpampDocument45 paginiPart IV OpampKunalÎncă nu există evaluări
- Power System 2Document103 paginiPower System 2msathish_eeeÎncă nu există evaluări
- EE-260 Lecture 07, 08, 09 TransformerDocument49 paginiEE-260 Lecture 07, 08, 09 TransformerNihal AhmadÎncă nu există evaluări
- Electrical Question 1Document32 paginiElectrical Question 1elec310Încă nu există evaluări
- Linear Circuit AnalysisDocument19 paginiLinear Circuit AnalysisFelixAvilaÎncă nu există evaluări
- Chapter Two: Representation of Power System ComponentsDocument24 paginiChapter Two: Representation of Power System ComponentsBonsaÎncă nu există evaluări
- Per Unit System 2022Document42 paginiPer Unit System 2022Muhammad HaikalÎncă nu există evaluări
- Edc Unit 3 TransistorDocument17 paginiEdc Unit 3 TransistorsrinivasÎncă nu există evaluări
- APFCDocument26 paginiAPFCPooja Ban100% (1)
- ENA ManualDocument60 paginiENA ManualAbdul Munim100% (1)
- Bus Time Table April 16Document10 paginiBus Time Table April 16Balaji VijendranÎncă nu există evaluări
- EE2092!2!2011 Coupled Circuits Dependant SourcesDocument100 paginiEE2092!2!2011 Coupled Circuits Dependant SourcesshrnbolonneÎncă nu există evaluări
- DC M&T - Lecture - Notes PDFDocument138 paginiDC M&T - Lecture - Notes PDFTridasha AithalÎncă nu există evaluări
- Ee3008 Ps-II Lab Manual 2Document25 paginiEe3008 Ps-II Lab Manual 2Swapnil Gade007Încă nu există evaluări
- Energy MeterDocument7 paginiEnergy MeterEd J. SaguinÎncă nu există evaluări
- 1.1 Ohm's Law: Unit Quantity I.EDocument53 pagini1.1 Ohm's Law: Unit Quantity I.EMithun MahtoÎncă nu există evaluări
- Edc Project Report: Prof. Garima SolankiDocument32 paginiEdc Project Report: Prof. Garima SolankiAnime X100% (1)
- 16.three PH 4 Wire UPQCDocument7 pagini16.three PH 4 Wire UPQCanji.guvvalaÎncă nu există evaluări
- 1 Ijeeerfeb20171Document12 pagini1 Ijeeerfeb20171TJPRC PublicationsÎncă nu există evaluări
- 1 020321 BrouherSTPP On Emerging Trends in Research MethodologyDocument2 pagini1 020321 BrouherSTPP On Emerging Trends in Research MethodologysureshÎncă nu există evaluări
- Ic Lab ManualDocument98 paginiIc Lab ManualsureshÎncă nu există evaluări
- Machine Modelling and Simulations: Special SectionDocument4 paginiMachine Modelling and Simulations: Special SectionsureshÎncă nu există evaluări
- Evolutionary Computing Techniques For Optimal Reactive Power Dispatch: An Overview and Key IssuesDocument5 paginiEvolutionary Computing Techniques For Optimal Reactive Power Dispatch: An Overview and Key IssuessureshÎncă nu există evaluări
- Accepted Manuscript: Applied Soft ComputingDocument36 paginiAccepted Manuscript: Applied Soft ComputingsureshÎncă nu există evaluări
- Power Supply With Parallel Reactive and Distortion Power Compensation and Tunable Inductive Filter - Part 1Document8 paginiPower Supply With Parallel Reactive and Distortion Power Compensation and Tunable Inductive Filter - Part 1sureshÎncă nu există evaluări
- Phd177 CSM WebDocument186 paginiPhd177 CSM WebsureshÎncă nu există evaluări
- ICA LAB For PrintingDocument92 paginiICA LAB For PrintingsureshÎncă nu există evaluări
- Five Days: P - C C: I V O Ampus E Pening"Document2 paginiFive Days: P - C C: I V O Ampus E Pening"sureshÎncă nu există evaluări
- Anna University Annexure 1 Journals 2019Document232 paginiAnna University Annexure 1 Journals 2019Hasib Al-ariki54% (13)
- Arduino Uno Rev 3Document4 paginiArduino Uno Rev 3Joan Perez PerezÎncă nu există evaluări
- Energies: A Novel Constraint Handling Approach For The Optimal Reactive Power Dispatch ProblemDocument23 paginiEnergies: A Novel Constraint Handling Approach For The Optimal Reactive Power Dispatch ProblemsureshÎncă nu există evaluări
- Steps To Arduino ProgrammingDocument10 paginiSteps To Arduino ProgrammingsureshÎncă nu există evaluări
- 55 F 254 de 08 Aef 559 DC 49361 eDocument16 pagini55 F 254 de 08 Aef 559 DC 49361 ehanythekingÎncă nu există evaluări
- Y Bus C++Document2 paginiY Bus C++sureshÎncă nu există evaluări
- Zhang 2018Document4 paginiZhang 2018sureshÎncă nu există evaluări
- Utilization of Waste WaterDocument5 paginiUtilization of Waste Watersree.akojuÎncă nu există evaluări
- Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsDocument15 paginiDefinition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and Definitionslepton1892100% (1)
- Arduino Uno Rev 3Document4 paginiArduino Uno Rev 3Joan Perez PerezÎncă nu există evaluări
- Arduino Uno Rev 3Document4 paginiArduino Uno Rev 3Joan Perez PerezÎncă nu există evaluări
- TRB Poly Technic Lecturer Previous Year Question EeDocument16 paginiTRB Poly Technic Lecturer Previous Year Question EesanthoshÎncă nu există evaluări
- Smart Irrigation System Using Iot:Sis: Aman Kumar Ajit KumarDocument5 paginiSmart Irrigation System Using Iot:Sis: Aman Kumar Ajit KumarsureshÎncă nu există evaluări
- Smart Irrigation System Using Iot:Sis: Aman Kumar Ajit KumarDocument5 paginiSmart Irrigation System Using Iot:Sis: Aman Kumar Ajit KumarsureshÎncă nu există evaluări
- Ec2255 Cs QBDocument13 paginiEc2255 Cs QBKarthikprabu BalrajÎncă nu există evaluări
- Arduino Uno Rev 3Document4 paginiArduino Uno Rev 3Joan Perez PerezÎncă nu există evaluări
- List of SAP Modules: Sap-Fi Sap-CoDocument2 paginiList of SAP Modules: Sap-Fi Sap-CotohemaÎncă nu există evaluări
- Engineering Applications of Arti Ficial Intelligence: Seyyed Hamid Samareh Moosavi, Vahid Khatibi BardsiriDocument15 paginiEngineering Applications of Arti Ficial Intelligence: Seyyed Hamid Samareh Moosavi, Vahid Khatibi BardsirisureshÎncă nu există evaluări
- Banking Awareness Feb 2018Document32 paginiBanking Awareness Feb 2018sureshÎncă nu există evaluări
- Attendance System Based On RFIDDocument9 paginiAttendance System Based On RFIDsureshÎncă nu există evaluări
- Easily Correct Phase Shift On A Delta-To-Wye Transformer For ParallelingDocument11 paginiEasily Correct Phase Shift On A Delta-To-Wye Transformer For ParallelingMujahid Ahmed FadelÎncă nu există evaluări
- Relay Setting Calculations: Relay Type: Easergy P3U30 Relay Make: Schneider Application: Back Up Protection - TrafoDocument3 paginiRelay Setting Calculations: Relay Type: Easergy P3U30 Relay Make: Schneider Application: Back Up Protection - TrafoHoàng Thái HưngÎncă nu există evaluări
- Short-Circuit Calculations For A Transmission LineDocument6 paginiShort-Circuit Calculations For A Transmission LineLuciano GabrielÎncă nu există evaluări
- Chapter 1. Introduction: Why Are We Concerned About Power QualityDocument17 paginiChapter 1. Introduction: Why Are We Concerned About Power QualityZulkarnaen Ali SiddikÎncă nu există evaluări
- Asad Ali Qazi (CV)Document4 paginiAsad Ali Qazi (CV)Azhar Ali QaziÎncă nu există evaluări
- 4.1 Forecasts and Generation Expansion Plan (PC 4) of The Grid Code - pdf-180919111727080Document3 pagini4.1 Forecasts and Generation Expansion Plan (PC 4) of The Grid Code - pdf-180919111727080Sheraz azamÎncă nu există evaluări
- Project Report Name-Shahil Kumar Singh REG NO - 19110126051 Roll No - 19eee43 Branch - Eee College - Bce BakhtiyarpurDocument20 paginiProject Report Name-Shahil Kumar Singh REG NO - 19110126051 Roll No - 19eee43 Branch - Eee College - Bce BakhtiyarpurShahilsingh SinghÎncă nu există evaluări
- CET Datasheet Enclosure Systems 48Vdc-120VacDocument5 paginiCET Datasheet Enclosure Systems 48Vdc-120VacAlejandro Garcia MÎncă nu există evaluări
- Vector Group of Transformer: Electrical Notes & ArticlesDocument24 paginiVector Group of Transformer: Electrical Notes & ArticlesRuchir PandeyÎncă nu există evaluări
- Stagnoli - Hermes Control BoardDocument8 paginiStagnoli - Hermes Control BoardUnescu UnuÎncă nu există evaluări
- Shashemane Polytechnic Collage Learning Guide: Troubleshoot AC/DC Power Supply With Single-Phase InputDocument50 paginiShashemane Polytechnic Collage Learning Guide: Troubleshoot AC/DC Power Supply With Single-Phase InputGizaw TadesseÎncă nu există evaluări
- UPS Operating Modes: A Global StandardDocument8 paginiUPS Operating Modes: A Global StandardAmila KumanayakeÎncă nu există evaluări
- EPSH4 - 1031 - PS - Stability Research PDFDocument201 paginiEPSH4 - 1031 - PS - Stability Research PDFyesar laftaÎncă nu există evaluări
- POWRGARD Electrical Products Catalog 2012Document220 paginiPOWRGARD Electrical Products Catalog 2012momir8657Încă nu există evaluări
- Designing An LLC Resonant Half-BridgeDocument36 paginiDesigning An LLC Resonant Half-Bridgecristian.rodriguezÎncă nu există evaluări
- DC/DC Converter Selection GuideDocument40 paginiDC/DC Converter Selection Guideforhad ahmmedÎncă nu există evaluări
- Energy Audit - QuestionnaireDocument4 paginiEnergy Audit - QuestionnaireRukma Goud ShakkariÎncă nu există evaluări
- Power Loss Fault Current AnalysisDocument12 paginiPower Loss Fault Current AnalysisMubarak AleemÎncă nu există evaluări
- Syllabus For Wireman Examination - 07.2015Document2 paginiSyllabus For Wireman Examination - 07.2015James NyamwayaÎncă nu există evaluări
- Connected Load Charge PDFDocument3 paginiConnected Load Charge PDFckwei0910Încă nu există evaluări
- Objective Type Questions For - Power System Operation and Control Final YearDocument110 paginiObjective Type Questions For - Power System Operation and Control Final YearGaurav Kumar Gupta73% (37)
- Question BankDocument11 paginiQuestion BankRohini MukunthanÎncă nu există evaluări
- Expt 2 Performance of A Steam PlantDocument8 paginiExpt 2 Performance of A Steam PlantAzim YusoffÎncă nu există evaluări
- 550 K VGISDocument18 pagini550 K VGISMinh VienÎncă nu există evaluări
- Lsa 50.2Document12 paginiLsa 50.2JafarShojaÎncă nu există evaluări
- Unsymmetrical Fault AnalysisDocument15 paginiUnsymmetrical Fault Analysiszeemred085100% (1)
- Test Report For Feeder Protection RelayDocument3 paginiTest Report For Feeder Protection RelayHari haranÎncă nu există evaluări
- Substation Design Criteria Document: East Point Collector Station Schoharie Co, NYDocument18 paginiSubstation Design Criteria Document: East Point Collector Station Schoharie Co, NYgeraldÎncă nu există evaluări
- STC Web Based Switchgear Training Calendar - CY - 2021Document7 paginiSTC Web Based Switchgear Training Calendar - CY - 2021MothilalÎncă nu există evaluări
- Spaj140c PDFDocument8 paginiSpaj140c PDFAfsar AliÎncă nu există evaluări