S-ar putea să vă placă și
- FMEA Procedure K-PosDocument111 paginiFMEA Procedure K-PosFábio GonçalvesÎncă nu există evaluări
- Pilatus 4Document436 paginiPilatus 4Haneet BhardwajÎncă nu există evaluări
- Radio Shack - Pro-2067 Trunk-Track VHF-UHF Scanner - ManualDocument56 paginiRadio Shack - Pro-2067 Trunk-Track VHF-UHF Scanner - ManualBenjamin DoverÎncă nu există evaluări
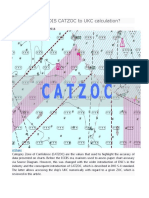
- How To Apply ECDIS CATZOC To UKC CalculationDocument9 paginiHow To Apply ECDIS CATZOC To UKC CalculationOrlando Quevedo100% (1)
- Sp3510 User ManualDocument48 paginiSp3510 User Manualchristos1157Încă nu există evaluări
- Lcu FDocument5 paginiLcu Fwildfire142Încă nu există evaluări
- DP Drilling PDF ManualDocument97 paginiDP Drilling PDF ManualFábio GonçalvesÎncă nu există evaluări
- Boeing 737 - Annotated Standard Operating Procedures (For Non - Professional Flight Simulation)Document37 paginiBoeing 737 - Annotated Standard Operating Procedures (For Non - Professional Flight Simulation)instahÎncă nu există evaluări
- Lecture - Satellite CommunicationDocument84 paginiLecture - Satellite CommunicationHazem Mohamed Youssif100% (1)
- Army Aviation MaintenanceDocument216 paginiArmy Aviation MaintenanceAerokosmonautikaÎncă nu există evaluări
- Apron Markings Amp Signs Handbook Published 2001 PDFDocument62 paginiApron Markings Amp Signs Handbook Published 2001 PDFTDH100% (1)
- Flight Test IntroductionDocument15 paginiFlight Test IntroductionBrandon BarkerÎncă nu există evaluări
- Product Guide o e w32Document200 paginiProduct Guide o e w32Zia Ur RehmanÎncă nu există evaluări
- ECDIS-Self NotesDocument10 paginiECDIS-Self NotesShridhar Pawar100% (1)
- Fmea ManualDocument191 paginiFmea ManualFábio GonçalvesÎncă nu există evaluări
- FAL.1-Circ.100-Rev.1 - Availability of Tug Assistance (Secretariat) PDFDocument7 paginiFAL.1-Circ.100-Rev.1 - Availability of Tug Assistance (Secretariat) PDFDaniel MartinezÎncă nu există evaluări
- The Nautical Institute Cyber Security Cyber Hygiene and The Use of ICT On Board PDFDocument12 paginiThe Nautical Institute Cyber Security Cyber Hygiene and The Use of ICT On Board PDFMinh HoangÎncă nu există evaluări
- How To Segregate Dangerous GoodsDocument15 paginiHow To Segregate Dangerous GoodsSurya DharmaÎncă nu există evaluări
- 5c. Fugro Seastar DescriptionDocument32 pagini5c. Fugro Seastar DescriptionFábio GonçalvesÎncă nu există evaluări
- 5c. Fugro Seastar DescriptionDocument32 pagini5c. Fugro Seastar DescriptionFábio GonçalvesÎncă nu există evaluări
- GPS Tutorial 1 PDFDocument43 paginiGPS Tutorial 1 PDFRavi ShankarÎncă nu există evaluări
- Spring Return and Double Acting Pneumatic Quarter-Turn Actuators For Output Torques To 27,624 LB - inDocument8 paginiSpring Return and Double Acting Pneumatic Quarter-Turn Actuators For Output Torques To 27,624 LB - inThanh Vuong NguyenÎncă nu există evaluări
- 08a NR203 MaerskslideDocument32 pagini08a NR203 MaerskslideFábio GonçalvesÎncă nu există evaluări
- 08a NR203 MaerskslideDocument32 pagini08a NR203 MaerskslideFábio GonçalvesÎncă nu există evaluări
- Freedom of Navigation and GlobalizationDocument331 paginiFreedom of Navigation and GlobalizationmahmutÎncă nu există evaluări
- OvitReport PDFDocument94 paginiOvitReport PDFLyubomir Ivanov100% (1)
- Conditiion of ClassificationDocument55 paginiConditiion of ClassificationVeeraiah AnbuÎncă nu există evaluări
- Jakarta HalimDocument12 paginiJakarta HalimApa Hak Anda Menanyakan ItuÎncă nu există evaluări
- WH 7x24 PresentationDocument25 paginiWH 7x24 PresentationTrenton K ThornockÎncă nu există evaluări
- Infographic Compliance With The NCC 2016Document2 paginiInfographic Compliance With The NCC 2016abhianand123Încă nu există evaluări
- Tokyo MOU Deficiency CodesDocument16 paginiTokyo MOU Deficiency CodesWirote ArcheepkosolÎncă nu există evaluări
- 02a DP Position WeightingDocument9 pagini02a DP Position WeightingFábio GonçalvesÎncă nu există evaluări
- Intertanko - Marpol Annex IIDocument30 paginiIntertanko - Marpol Annex IIdodoi_neelr100% (1)
- 03.legislative FrameworkDocument22 pagini03.legislative Frameworkmingo622Încă nu există evaluări
- Imca M 252Document40 paginiImca M 252rookhnÎncă nu există evaluări
- 07a.dps General MaintenanceDocument67 pagini07a.dps General MaintenanceFábio GonçalvesÎncă nu există evaluări
- 07a.dps General MaintenanceDocument67 pagini07a.dps General MaintenanceFábio GonçalvesÎncă nu există evaluări
- Solas For TankerDocument25 paginiSolas For TankerlalindaÎncă nu există evaluări
- 10a. FanbeamDocument8 pagini10a. FanbeamFábio Gonçalves100% (1)
- Gmdss Guide PDFDocument12 paginiGmdss Guide PDFZayaÎncă nu există evaluări
- IMCA - M 189 - Small-Boats-Blank-writable PDFDocument23 paginiIMCA - M 189 - Small-Boats-Blank-writable PDFMasterPie1950Încă nu există evaluări
- Pozitioner Analogic AVIDDocument14 paginiPozitioner Analogic AVIDPop-Coman Simion100% (2)
- Cheklist Fsi and GiDocument14 paginiCheklist Fsi and GiKumar AnandÎncă nu există evaluări
- 11a Taut WireDocument10 pagini11a Taut WireFábio GonçalvesÎncă nu există evaluări
- Risk Mangament in InsursnceDocument40 paginiRisk Mangament in InsursnceAlaa AlikÎncă nu există evaluări
- 700/3000 VA User's Guide: Eaton 9130 UPSDocument98 pagini700/3000 VA User's Guide: Eaton 9130 UPSRodrigo Molina ContrerasÎncă nu există evaluări
- Multi Gas Clip: The First Portable Multi Gas Detector With A Battery Life of Months Instead of HoursDocument2 paginiMulti Gas Clip: The First Portable Multi Gas Detector With A Battery Life of Months Instead of HourssuryamomingÎncă nu există evaluări
- ISM Code: Statistic Figures State 80 % of Accident Caused by Human ErrorDocument6 paginiISM Code: Statistic Figures State 80 % of Accident Caused by Human ErrorFoad MirzaieÎncă nu există evaluări
- International Convention For The Safety of Life at Sea (SOLAS), 1974Document24 paginiInternational Convention For The Safety of Life at Sea (SOLAS), 1974Rohit MishraÎncă nu există evaluări
- VMP 530vhmDocument2 paginiVMP 530vhmelienai10% (1)
- ITrans2 - User Manual - EN - Rev 6.0-UnlockedDocument104 paginiITrans2 - User Manual - EN - Rev 6.0-UnlockedandresÎncă nu există evaluări
- Gyrocompass Navigat X MK 2Document4 paginiGyrocompass Navigat X MK 2tariktunadÎncă nu există evaluări
- New Su-30SM2 Will It Be Better Than The RafaleDocument6 paginiNew Su-30SM2 Will It Be Better Than The RafaleHicham OuakilÎncă nu există evaluări
- 06a. DPS Series DescriptionDocument32 pagini06a. DPS Series DescriptionFábio GonçalvesÎncă nu există evaluări
- 15b Fugro InformationDocument1 pagină15b Fugro InformationFábio GonçalvesÎncă nu există evaluări
- 17a DARPS & DPS 12 & 100 TroubleshootingDocument18 pagini17a DARPS & DPS 12 & 100 TroubleshootingFábio GonçalvesÎncă nu există evaluări
- International Ship and Port Facilities Security (Isps) CodeDocument64 paginiInternational Ship and Port Facilities Security (Isps) CodeGoran JurisicÎncă nu există evaluări
- International Regulations On ShippingDocument31 paginiInternational Regulations On ShippingKhairil AzmanÎncă nu există evaluări
- Maritime: Edward Nonku Wanele Thingo Byron Andiswa WinstoneDocument11 paginiMaritime: Edward Nonku Wanele Thingo Byron Andiswa WinstonemahdouchfkiÎncă nu există evaluări
- 1583330143phase 2 - MMD Ques Set Till Feb 2020 PDFDocument211 pagini1583330143phase 2 - MMD Ques Set Till Feb 2020 PDFNelson VargheseÎncă nu există evaluări
- The International Marine The International Marine Contractors AssociationDocument7 paginiThe International Marine The International Marine Contractors Associationhumberto arroyoÎncă nu există evaluări
- 04-Analog Celsa Eng WebDocument44 pagini04-Analog Celsa Eng WebtafseerahmedÎncă nu există evaluări
- 1039 Epirb Testing GuidelinesDocument7 pagini1039 Epirb Testing Guidelinessantosh tiwariÎncă nu există evaluări
- IMO Conventions MatrixDocument22 paginiIMO Conventions Matrixhackey720Încă nu există evaluări
- Furuno Ro4800 Operators ManualDocument30 paginiFuruno Ro4800 Operators ManualStuart EastlandÎncă nu există evaluări
- Radius 700 - Long Range Battery Operated TransponderDocument2 paginiRadius 700 - Long Range Battery Operated TransponderNishant PandyaÎncă nu există evaluări
- ECDISDocument20 paginiECDISFrancisco GouveiaÎncă nu există evaluări
- NAVTEXDocument5 paginiNAVTEXS El CinÎncă nu există evaluări
- NAVTEXDocument3 paginiNAVTEXAbdel Nasser Al-sheikh Yousef100% (1)
- Phase II Law Solved MMD QP 2012-2014Document173 paginiPhase II Law Solved MMD QP 2012-2014siddharth dixitÎncă nu există evaluări
- MV103 Brochure 0709Document2 paginiMV103 Brochure 0709kongbengÎncă nu există evaluări
- reach compliance A Complete Guide - 2019 EditionDe la Everandreach compliance A Complete Guide - 2019 EditionÎncă nu există evaluări
- Development and Test Results of A Cost Effective Inverse DGPS SystemDocument9 paginiDevelopment and Test Results of A Cost Effective Inverse DGPS SystemArindam ChakrabortyÎncă nu există evaluări
- AdditionalDocument6 paginiAdditionaleyuel tamratÎncă nu există evaluări
- Differential GPSDocument2 paginiDifferential GPSAimanÎncă nu există evaluări
- 3a.1.2 - GPS ErrorsDocument34 pagini3a.1.2 - GPS ErrorsParamjot SinghÎncă nu există evaluări
- Exercise 02 DGPS FUGRO v.1.2 AnswersDocument5 paginiExercise 02 DGPS FUGRO v.1.2 AnswersDouglas BemficaÎncă nu există evaluări
- DP Induction - Global Navigation Satellite System (GNSS)Document16 paginiDP Induction - Global Navigation Satellite System (GNSS)Kvartira VilyyamsaÎncă nu există evaluări
- Chapter 16A GlonassDocument3 paginiChapter 16A GlonassFábio GonçalvesÎncă nu există evaluări
- Chapter 16A GlonassDocument3 paginiChapter 16A GlonassFábio GonçalvesÎncă nu există evaluări
- 15a Sub RequestDocument1 pagină15a Sub RequestFábio GonçalvesÎncă nu există evaluări
- 04a. DPS & Fugro Trainer Start-UpDocument11 pagini04a. DPS & Fugro Trainer Start-UpFábio GonçalvesÎncă nu există evaluări
- Vex ReflectionDocument1 paginăVex Reflectionapi-200397614Încă nu există evaluări
- Terex 33 05B Rock TruckDocument2 paginiTerex 33 05B Rock TruckAmol JdvÎncă nu există evaluări
- Airport Design Software - AirportsDocument3 paginiAirport Design Software - Airportstoninho_vásquezÎncă nu există evaluări
- Aiaa 2006 4718Document16 paginiAiaa 2006 4718haddanÎncă nu există evaluări
- Airfoil WarnabDocument13 paginiAirfoil Warnabjacob ellyÎncă nu există evaluări
- Gas Dynamics-Fanno FlowDocument29 paginiGas Dynamics-Fanno FlowRahulÎncă nu există evaluări
- B737 Good To Know LimitationsDocument4 paginiB737 Good To Know LimitationsPhilÎncă nu există evaluări
- Report - CEN22FA031 - 104239 - 12 - 16 - 2021 9 - 03 - 11 AMDocument5 paginiReport - CEN22FA031 - 104239 - 12 - 16 - 2021 9 - 03 - 11 AMDevon Louise KesslerÎncă nu există evaluări
- Cornish MethodDocument30 paginiCornish MethodEverlasting MemoriesÎncă nu există evaluări
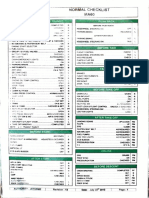
- MA-60 Normal Checklist (MNA)Document2 paginiMA-60 Normal Checklist (MNA)rana prawiraÎncă nu există evaluări
- 5 StabilizersDocument15 pagini5 StabilizersywllppoppÎncă nu există evaluări
- Resis Sinkage Trim Wake Test PDFDocument30 paginiResis Sinkage Trim Wake Test PDFSea Man MktÎncă nu există evaluări
- Nothing Less Than Everything: The Incredible Saga of George WelchDocument21 paginiNothing Less Than Everything: The Incredible Saga of George WelchCorey C. Jordan100% (2)
- Sample of Written Examination QuestionsDocument50 paginiSample of Written Examination QuestionsBirthwell MbiriÎncă nu există evaluări
- Mido History enDocument4 paginiMido History enRobertIonicaÎncă nu există evaluări
- Spectrum BrochureDocument16 paginiSpectrum BrochuredimdamflyÎncă nu există evaluări
- Supplemental Type Certificate: NumberDocument3 paginiSupplemental Type Certificate: NumberJuan C BalderasÎncă nu există evaluări
- AIR REGULATIONS (Full Syllabus) (16 Sep)Document18 paginiAIR REGULATIONS (Full Syllabus) (16 Sep)himanshu goyalÎncă nu există evaluări
- Gps ModuleDocument24 paginiGps ModuleDarkSylerÎncă nu există evaluări
- Derivation of The K Epsilon ModelDocument3 paginiDerivation of The K Epsilon ModelFbgames StefÎncă nu există evaluări