S-ar putea să vă placă și
- LECTURA Riesgos PinarDocument21 paginiLECTURA Riesgos PinarLeonardo Herrera RomeroÎncă nu există evaluări
- ValloracionDocument3 paginiValloracionDison Uziel Orihuela QuispeÎncă nu există evaluări
- Etapas de Un ProyectoDocument3 paginiEtapas de Un ProyectoJenny JoyaÎncă nu există evaluări
- PIC MAXI WEB - Docx (Recuperado)Document18 paginiPIC MAXI WEB - Docx (Recuperado)Dison Uziel Orihuela QuispeÎncă nu există evaluări
- ActaDeConstitucion EjemploDocument5 paginiActaDeConstitucion EjemploYedidCruzÎncă nu există evaluări
- Riesgo SDocument1 paginăRiesgo SDison Uziel Orihuela QuispeÎncă nu există evaluări
- Trabajo F3 G5 2017 II Caceres N. Orihuela Quintanilla PDFDocument1 paginăTrabajo F3 G5 2017 II Caceres N. Orihuela Quintanilla PDFDison Uziel Orihuela QuispeÎncă nu există evaluări
- Evaluación de Desempeño Basado en Competencias: ¿Qué Es?Document3 paginiEvaluación de Desempeño Basado en Competencias: ¿Qué Es?gerardo fortalezaÎncă nu există evaluări
- AnexoDocument1 paginăAnexoDison Orihuela DrkÎncă nu există evaluări
- Bases Star - 2015Document3 paginiBases Star - 2015Dison Uziel Orihuela QuispeÎncă nu există evaluări
- 1000 Ideas de Negocios EbookDocument304 pagini1000 Ideas de Negocios EbookSweethy Arte100% (1)
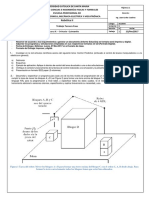
- Estatica P #4Document7 paginiEstatica P #4Dison Uziel Orihuela QuispeÎncă nu există evaluări
- Lista de Alumnos ColacionDocument1 paginăLista de Alumnos ColacionDison Uziel Orihuela QuispeÎncă nu există evaluări
- Informe FinalDocument44 paginiInforme FinalDison Uziel Orihuela QuispeÎncă nu există evaluări
- Cotizacion SalaDocument1 paginăCotizacion SalaLimon Con SalÎncă nu există evaluări
- Parada - Calabacito - 2020Document1 paginăParada - Calabacito - 2020INGCESA PANAMAÎncă nu există evaluări
- Manual-Basico Del AutonomoDocument23 paginiManual-Basico Del Autonomotirolibre0% (1)
- La Torre LatinoamericanaDocument4 paginiLa Torre LatinoamericanaJuliio Salaas'zÎncă nu există evaluări
- Inversiones S&LDocument7 paginiInversiones S&Ldel valleÎncă nu există evaluări
- Rolando CcamaDocument13 paginiRolando CcamaRolo CcÎncă nu există evaluări
- Cuestionario de MacroeconomiaDocument3 paginiCuestionario de MacroeconomiaNAHOMI ESTHER SEBASTIAN URQUIAÎncă nu există evaluări
- Curriculum Inlace 29052012 PDFDocument15 paginiCurriculum Inlace 29052012 PDFAnonymous gpQBFLdABÎncă nu există evaluări
- Cuando Llora La MilongaDocument5 paginiCuando Llora La MilongaManuela UribeÎncă nu există evaluări
- Proc de Quema de HidrocarburosDocument13 paginiProc de Quema de HidrocarburosUlysses JimenezÎncă nu există evaluări
- Clase Patologías Renales y Complejos CongenitosDocument18 paginiClase Patologías Renales y Complejos Congenitosdany EsparzaÎncă nu există evaluări
- Trabajo Unidad 1 Cadenas de SuministroDocument27 paginiTrabajo Unidad 1 Cadenas de SuministroJose Rodrigo Ramires SanchezÎncă nu există evaluări
- Zuleta Velasquez, Estanislao - La Poesia de Luis Carlos Lopez.-Hombre Nuevo (2004) PDFDocument96 paginiZuleta Velasquez, Estanislao - La Poesia de Luis Carlos Lopez.-Hombre Nuevo (2004) PDFRonald SimmonsÎncă nu există evaluări
- Biología Celular y MolecularDocument24 paginiBiología Celular y MolecularEiffer CarreñoÎncă nu există evaluări
- PRE - AIS - AGENCIA NACIONAL de INVESTIGACIÓN Y DESARROLLO - Informe para Medición de Aislamiento en Cabinas de Videoconferencias Santiago CentroDocument8 paginiPRE - AIS - AGENCIA NACIONAL de INVESTIGACIÓN Y DESARROLLO - Informe para Medición de Aislamiento en Cabinas de Videoconferencias Santiago CentroLucas GradoÎncă nu există evaluări
- Examen Resuelto Matemáticas 1ºESO - Números DecimalesDocument4 paginiExamen Resuelto Matemáticas 1ºESO - Números DecimalesQueti GutierrezÎncă nu există evaluări
- Icfes Organos de Los SentidosDocument3 paginiIcfes Organos de Los SentidosEssaú C.Încă nu există evaluări
- Clasificacion Del SueDocument7 paginiClasificacion Del SueJhoel CRÎncă nu există evaluări
- Plan de Gestion de TransitoDocument8 paginiPlan de Gestion de TransitoErick Antonio Pingo ArrietaÎncă nu există evaluări
- I Unidad Modulo 2Document12 paginiI Unidad Modulo 2Nivardo romero huaytaÎncă nu există evaluări
- Marco TeoricoDocument25 paginiMarco Teoriconayeli garcia100% (3)
- Dietas para Vesicula BiliarDocument11 paginiDietas para Vesicula BiliarFredyamerico M Villalobos100% (1)
- Transformaciones GeometricasDocument17 paginiTransformaciones Geometricassarah penaÎncă nu există evaluări
- 7.-Contratos Especiales.Document20 pagini7.-Contratos Especiales.Sharon Dayana Barra MamaniÎncă nu există evaluări
- EstequiometríaDocument12 paginiEstequiometríaMinyodaÎncă nu există evaluări
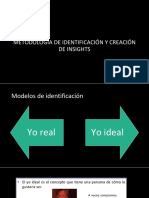
- Metodologías de Identificación de InsightsDocument24 paginiMetodologías de Identificación de InsightsJairo Andrés HuertasÎncă nu există evaluări
- HCM 2010 Capitulo 15 en Espanol PDFDocument40 paginiHCM 2010 Capitulo 15 en Espanol PDFdennys carrillo100% (1)
- Instrumentación CÁLCULO INTEGRAL (2021-1) TECNM-AC-PO-003-02Document8 paginiInstrumentación CÁLCULO INTEGRAL (2021-1) TECNM-AC-PO-003-02Angel ArgüelloÎncă nu există evaluări
- SufiDocument1 paginăSufiMaria fernanda Herrera chasoyÎncă nu există evaluări
- Clase 06 ESTDocument23 paginiClase 06 ESTMartin50% (2)