Documente Academic
Documente Profesional
Documente Cultură
Klubprepa Extrait 6438
Încărcat de
SaadElHafidiTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Klubprepa Extrait 6438
Încărcat de
SaadElHafidiDrepturi de autor:
Formate disponibile
Sciences Indusrielles
MECANISMES : Thorie des mcanismes
Cours
THEORIE DES MECANISMES
HYPERSTATISME, MOBILITE,
LIAISON EQUIVALENTE
1. DEFINITIONS......................................................................................................................2
1.1. Mcanisme ....................................................................................................................2
1.2. Liaisons quivalentes......................................................................................................5
2. Mobilit Etude cinmatique ..................................................................................................6
2.1. Dfinitions Mobilit interne Mobilit utile....................................................................6
3. Hyperstatisme Etude statique ...............................................................................................8
3.1. Etude statique ................................................................................................................8
3.2. Hyperstatisme Isostatisme ...........................................................................................8
3.3. Etude pratique : Systme Bielle manivelle - Piston .........................................................9
4. Relation entre hyperstatisme et mobilit .................................................................................12
4.1. Relation.......................................................................................................................12
4.2. Etude pratique relle : Systme Bielle manivelle Piston .............................................14
4.3. Dterminer les inconnues hyperstatiques : Systme Bielle manivelle Piston ................14
4.4. Rduire lhyperstatisme : Systme Bielle manivelle Piston.........................................15
5. Liaisons quivalentes............................................................................................................17
5.1. De liaisons en srie : Robot...........................................................................................17
5.2. De liaisons en parallle : Liaison glissire .......................................................................18
Page 1 Emmanuel FARGES EduKlub S.A.
Tous droits de lauteur des uvres rservs. Sauf autorisation, la reproduction ainsi que toute utilisation des uvres
autre que la consultation individuelle et prive sont interdites.
Extrait gratuit de document, le document original comporte 21 pages.
Sciences Indusrielles
MECANISMES : Thorie des mcanismes
Cours
1. DEFINITIONS.
1.1. Mcanisme
Rappelons la notion de mcanisme :
Dfinition : Un systme mcanique ou mcanisme est un ensemble de pices positionner entre
elles par des contacts (donc en liaisons) dans le but de raliser une ou plusieurs
fonctions
On peut schmatiser un mcanisme dans le cas gnral de la faon suivante :
Entres
Sorties
Mcanisme
Un mcanisme est schmatis par :
son plan de dfinition
son schma cinmatique ou schma de structure si il nest pas
miminum
son graphe des liaisons
Pour ltude de lhyperstatisme et de la mobilit du mcanisme lutilisation des modles schmatis
(graphe des liaisons et schma de structure ou cinmatique) est suffisant.
1.1.1. A chane ouverte
r 5
On qualifie un mcanisme de y5
chane ouverte lorsque son D 4 2
B
graphe des liaisons nest pas r
boucl .Cela caractrise les z0
mcanismes de type bras de robot :
3
Exemple : Bras de robot C
A 1
Schma cinmatique : r
x1
Page 2 Emmanuel FARGES EduKlub S.A.
Tous droits de lauteur des uvres rservs. Sauf autorisation, la reproduction ainsi que toute utilisation des uvres
autre que la consultation individuelle et prive sont interdites.
Extrait gratuit de document, le document original comporte 21 pages.
Sciences Indusrielles
MECANISMES : Thorie des mcanismes
Cours
Graphe des liaisons :
Pivot Pivot Pivot Pivot Pivot
daxe daxe daxe daxe
daxe
r r r
r
( Oz0 ) ( Ax1 ) r
( Bx1 ) ( Cx1 ) ( Dy5 )
3 4 5
0 1 2
Chane ouverte : pas de boucle ou cycle
1.1.2. A chane ferme
On qualifie un mcanisme de chane ferme lorsque son graphe des liaisons est boucl ou
prsente un cycle. Cela caractrise les mcanismes de type transformation de mouvement.
Exemple : Systme Bielle
A
Manivelle - Piston
Schma cinmatique : Manivelle 1
Bielle 2
O
r
z0
Piston3
Pivot
Graphe des daxe
r r
liaisons : ( Oz0 ) x0
0 1
Pivot Pivot Chane ferme : boucle ou cycle
glissante daxe
r
daxe
r
( Bx0 ) ( Az 0 )
3 2
Pivot
daxe
r
( Bz0 )
1.1.3. A chane complexe Nombre cyclomatique
Mcanisme chanes complexes :
Dfinition : Un mcanisme chane complexe est un mcanisme pour lequel le graphe des
liaisons prsente des cycles imbriqus (partie de chanes fermes) avec ou
sans des parties de chanes ouvertes.
Page 3 Emmanuel FARGES EduKlub S.A.
Tous droits de lauteur des uvres rservs. Sauf autorisation, la reproduction ainsi que toute utilisation des uvres
autre que la consultation individuelle et prive sont interdites.
Extrait gratuit de document, le document original comporte 21 pages.
Sciences Indusrielles
MECANISMES : Thorie des mcanismes
Cours
Exemple : Robot de manutention r
z0
Schma cinmatique :
C D
B
r
y0
O
A
r
x0
Graphe des liaisons :
Pivot
daxe Partie chane ferme : ici 2 cycles
r
( Oz0 ) 1 indpendants ( Transformation de mouvement
)
0 hlicodale
Pivot daxe
r
glissante
daxe
( Oz0 )
r
( Bz0 )
Pivot Pivot 4
2 3
daxe daxe
r r
Pivot ( Cz0 ) ( Dz0 )
glissante
r Partie chane ouverte : bras du robot
daxe ( Az 0 )
1 chane ouverte 2 3 -4
3 cycles : mais seulement 2 indpendants
r
0 2 1 0 par la pivot daxe ( A, z0 )
r
0 2 1 0 par la pivot daxe ( B, z0 )
0 2 0 liaison en parallle = 1 cycle
Nombre cyclomatique :
Dfinition : Le nombre cyclomatique, not est le nombre de boucles indpendantes du
graphe des liaisons dun mcanisme
Page 4 Emmanuel FARGES EduKlub S.A.
Tous droits de lauteur des uvres rservs. Sauf autorisation, la reproduction ainsi que toute utilisation des uvres
autre que la consultation individuelle et prive sont interdites.
Extrait gratuit de document, le document original comporte 21 pages.
Sciences Indusrielles
MECANISMES : Thorie des mcanismes
Cours
Sur lexemple du robot de manutention ci-dessus, on a 3 boucles (deux en traits pleins et une en
pointill) mais uniquement 2 sont indpendantes (la pointille tant la runion des deux prcdentes
en traits pleins). On a donc =2.
Notons :
I l le nombre de liaisons du graphe des liaisons.
I n le nombre de solides du graphe des liaisons.
On a la relation suivante entre ces deux quantits et le nombre cyclomatique :
= l n +1
Vrifions la sur notre exemple :
Le robot de manutention possde 5 solides et 6 liaisons. On a donc l = 6 et n = 5 . Ce qui
donne = 6 5+ 1= 2 cycles indpendants
1.2. Liaisons quivalentes
Donnons uniquement les dfinitions ce paragraphe.
On reviendra sur la faon de dterminer les liaisons quivalentes au paragraphe 5.
Liaison quivalente de liaisons en srie :
Prenons une structure dune partie de
mcanisme reprsente par le graphe L1 L2
1 2 3
des liaisons partiel ci-contre :
Rechercher la liaison quivalente de la mise
Leq
en srie des liaisons L1 et L2 revient 1 3
chercher avoir une liaison Leq telle que le
graphe des liaisons soit quivalent celui-ci :
Liaison quivalente de liaisons en parallles :
L1
Prenons une structure dune partie de
L2
mcanisme reprsente par le graphe 1 2
des liaisons partiel ci-contre :
L3
Rechercher la liaison quivalente de la mise en
parallle des liaisons L1 , L2 et L3 revient Leq
1 2
chercher avoir une liaison Leq telle que le
graphe des liaisons soit quivalent celui-ci :
Page 5 Emmanuel FARGES EduKlub S.A.
Tous droits de lauteur des uvres rservs. Sauf autorisation, la reproduction ainsi que toute utilisation des uvres
autre que la consultation individuelle et prive sont interdites.
Extrait gratuit de document, le document original comporte 21 pages.
Sciences Indusrielles
MECANISMES : Thorie des mcanismes
Cours
L2
2 3
L1
Liaison quivalente dun L3
mcanisme : L4 L5 L6
1 5 8
4
Prenons un mcanisme reprsent par
L7
son graphe des liaisons ci-dessous
L9
L8
6 7
Rechercher la liaison quivalente
entre 1 et 2 revient cher Leq1de la chane 1-2-3-8
le graphe des liaisons soit
quivalent celui-ci : 1 Leq2de la chane 1-4-5-8 8
Puis enfin : Leq3 de la chane 1-6-7-8
Leq de la mise en parallle des liaisons Leq1, Leq2 et Leq3
1 8
2. Mobilit Etude cinmatique
2.1. Dfinitions Mobilit interne Mobilit utile
Notations :
L: Nombre total de liaisons
N: Nombre total de solides dans le mcanisme
nci : nombre dinconnues cinmatiques da la liaison i = nombre de ddl de la liaison i
Nc : nombre total dinconnues cinmatiques
N c = nci
En crivant une fermeture cinmatique pour chaque cycle indpendant du graphe des liaisons, on
obtient un systme dquation 6 quations dans lespace et 3 quations dans le plan :
r
{( )}
0
M V i i + 1 = 0r fois
M
Sur ces 6 quations, seules rC sont indpendantes.
rC : nombre dquations cinmatiques indpendantes
Dfinitions :
On appelle mobilit dun mcanisme la quantit m = NC rC avec m = mu + mi
mi : mobilits internes du mcanisme = mouvements possibles de solides ou densemble
de solides nentranant pas le mouvement des autres solides du mcanisme
Page 6 Emmanuel FARGES EduKlub S.A.
Tous droits de lauteur des uvres rservs. Sauf autorisation, la reproduction ainsi que toute utilisation des uvres
autre que la consultation individuelle et prive sont interdites.
Extrait gratuit de document, le document original comporte 21 pages.
Sciences Indusrielles
MECANISMES : Thorie des mcanismes
Cours
mu : mobilits utiles du mcanisme (en gnral 1 ou 2) = mouvements fournir (via un
actionneur) au mcanisme pour le mettre en mouvement
Exemple : Systme Bielle Manivelle Piston dans lespace :
Descriptif :
r r
y0 x1 Paramtrage des solides
1
uuur
2
OA = Rxr1
A uuur
AB = Lxr2
uuur
L
OB = xr ur r
R 30 = & x
B
O r
x0
0
r 3
x2
o 0 : Bti
o 1 : Mannivelle
o 2 : Bielle
o 3 : Piston Pivot
daxe
r
Graphe des liaisons : ( Oz0 )
De faon vidente, en les comptant sur le graphe des 0 1
liaisons ou sur le schma cinmatique : Pivot
Pivot daxe
r
L=4 glissante
r ( Az 0 )
N=4 ( x0 )
NC = 1123
+ 1 + 1 + 2{ 3
Pivot
2
3 pivots 1 pivot
glissante daxe
r
( Bz0 )
O vrifie bien = L N + 1 = 4 4 + 1 = 1
On a donc une seule fermeture cinmatique crire :
r
{V ( 03 )} + {V ( 3 2 )} + {V ( 2 1 )} + {V ( 10 )}
0
= r
O O O O 0
O
-& -& 0 0 0 L& sin 0 0 0 0
0 0 + 0 & + 0 L& cos + 0 0 = 0 0
0 0 -& & 0 3 O & 0 0 0
O {0
uuuur r 14 24 O
uuur r
O OD32 O OA
21
Page 7 Emmanuel FARGES EduKlub S.A.
Tous droits de lauteur des uvres rservs. Sauf autorisation, la reproduction ainsi que toute utilisation des uvres
autre que la consultation individuelle et prive sont interdites.
Extrait gratuit de document, le document original comporte 21 pages.
Sciences Indusrielles
MECANISMES : Thorie des mcanismes
Cours
Systme dquations 6 quations et 5 inconnues (NC=5)
0 = &
0 = 0
0 = & +& +&
4 quations indpendantes (en bleu) rC = 4
& &
0 = + L sin
0 = & L& cos
0 = 0
m = NC rC
m = 1 = 1{ + 0{ . Une seule mobilit utile (entre : rotation , sortie : translation ) et pas de
mu mi
mobilit interne.
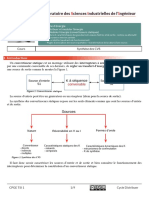
3. Hyperstatisme Etude statique
3.1. Etude statique
Pour un mcanisme N solides, on a N-1solides si lon ne comptabilise pas le bti (sur lequel on
ne peut pas faire disolement donc sur lequel on ne peut pas appliquer le Principe Fondamental de la
Statique PFS)
On peut donc appliquer le Principe Fondamental de la Statique PFS N-1 fois, cest dire
obtenir un systme a 6 ( N 1) quations.
Sur ces 6 ( N 1) quations, seules rS sont indpendantes.
Dfinitions :
rS : nombre dquations issues de la statique INDEPENDANTES
N S = nSi nombre total dinconnues statiques
nSi nombre dinconnues statiques de liaison i.
3.2. Hyperstatisme Isostatisme
Dfinitions :
On appele degr dhyperstatisme, not h , dun systme mcanique la quantit h = N S rS
On dit quun systme est isotatique si h = 0 (autant dquations indpendantes que
dinconnues le systme a une solution unique
Page 8 Emmanuel FARGES EduKlub S.A.
Tous droits de lauteur des uvres rservs. Sauf autorisation, la reproduction ainsi que toute utilisation des uvres
autre que la consultation individuelle et prive sont interdites.
Extrait gratuit de document, le document original comporte 21 pages.
S-ar putea să vă placă și
- 9 Recettes Indispensables Pour Passer de Maigre À MuscléDocument18 pagini9 Recettes Indispensables Pour Passer de Maigre À MuscléSaadElHafidiÎncă nu există evaluări
- CV Ingenieur D EtatDocument1 paginăCV Ingenieur D EtatSaadElHafidiÎncă nu există evaluări
- Demande de Visa RempliDocument6 paginiDemande de Visa RempliSaadElHafidiÎncă nu există evaluări
- Transfo Tri Bis ExosDocument6 paginiTransfo Tri Bis ExosSaadElHafidiÎncă nu există evaluări
- Homo JonctionDocument32 paginiHomo JonctionSaadElHafidiÎncă nu există evaluări
- 2010 Rochambeau Exo4Document4 pagini2010 Rochambeau Exo4SaadElHafidiÎncă nu există evaluări
- td3 Version1Document3 paginitd3 Version1SaadElHafidiÎncă nu există evaluări
- Cours Materiaux Isolants - DocDocument35 paginiCours Materiaux Isolants - DocJihen Rf100% (1)
- Filtration GlomerulaireDocument16 paginiFiltration GlomerulaireRania HamdiÎncă nu există evaluări
- 16 17 Examen BD Smi Lpii CorrectionDocument6 pagini16 17 Examen BD Smi Lpii Correctionadilcharahil2000Încă nu există evaluări
- Pfe GC 0012-7Document10 paginiPfe GC 0012-7Gifted MouhcineÎncă nu există evaluări
- Mise en Forme Des Polymeres Approche Thermomecanique de La Plasturgie 4 Ed SommaireDocument36 paginiMise en Forme Des Polymeres Approche Thermomecanique de La Plasturgie 4 Ed Sommairemostafa oubihiÎncă nu există evaluări
- Les VecteursDocument6 paginiLes VecteursGAEL ETIENNEÎncă nu există evaluări
- Guide D'administration TWSDocument413 paginiGuide D'administration TWSDenazareth JesusÎncă nu există evaluări
- Installation Et Configuration D'un Serveur FTP Sous LinuxDocument7 paginiInstallation Et Configuration D'un Serveur FTP Sous LinuxClubTutorielInformatiqueÎncă nu există evaluări
- QCM Corro Architecture - 123325Document6 paginiQCM Corro Architecture - 123325Grâce AudreyÎncă nu există evaluări
- Catalogue 2016 HB - IndustriesDocument44 paginiCatalogue 2016 HB - IndustriesanassÎncă nu există evaluări
- Cours Theorie Du Controle3Document38 paginiCours Theorie Du Controle3Abderrahim El amraniÎncă nu există evaluări
- Pages From ASIRI-Recommandations-2012 - CompressedDocument190 paginiPages From ASIRI-Recommandations-2012 - CompressedYaseen AlAjmi CompanyÎncă nu există evaluări
- TD PharmacométrieDocument8 paginiTD PharmacométrieSoumaya HizaouiÎncă nu există evaluări
- Canevas LicenceDocument8 paginiCanevas LicenceKassi ZidaneÎncă nu există evaluări
- Automatique Niveau1Document77 paginiAutomatique Niveau1ssssÎncă nu există evaluări
- Couples Des Va 1Document6 paginiCouples Des Va 1LoudjeineÎncă nu există evaluări
- L Etude de La Geolocalisation Dans Les Reseaux Mobiles GSM Et CDMA A MOBILINFODocument77 paginiL Etude de La Geolocalisation Dans Les Reseaux Mobiles GSM Et CDMA A MOBILINFOAdama SowÎncă nu există evaluări
- Cours 6 Moteurs A Combustion InternesDocument7 paginiCours 6 Moteurs A Combustion Internesahmed ahmadÎncă nu există evaluări
- Correction Activité1Document9 paginiCorrection Activité1Dany ObeidÎncă nu există evaluări
- Examen Blanc 2Document4 paginiExamen Blanc 2AlcalinaPhysicsÎncă nu există evaluări
- 4-Les AnnuitésDocument17 pagini4-Les AnnuitésMarcelo BouhbaÎncă nu există evaluări
- QCM1Document4 paginiQCM1ChristianÎncă nu există evaluări
- Epreuve Types Validés Maths 16 4 2021Document79 paginiEpreuve Types Validés Maths 16 4 2021Félix NKURUNZIZAÎncă nu există evaluări
- Analyse Granulométrique Compte Rendu TP MDC Génie Civil PDFDocument10 paginiAnalyse Granulométrique Compte Rendu TP MDC Génie Civil PDFtatif100% (5)
- Exercice Photochimie CorrigéDocument12 paginiExercice Photochimie CorrigéchemputicÎncă nu există evaluări
- Guide Reporting Tableaux de Bord Microsoft Dynamics CRM 2013Document78 paginiGuide Reporting Tableaux de Bord Microsoft Dynamics CRM 2013youssef MCHÎncă nu există evaluări
- Corrigé Type Du Modue Les Écoulements en Charge Master 1 Hydraulique UrbaineDocument5 paginiCorrigé Type Du Modue Les Écoulements en Charge Master 1 Hydraulique UrbaineMimouna TabetÎncă nu există evaluări
- Memoire de Fin D'EtudesDocument63 paginiMemoire de Fin D'Etudestakoua.belghitÎncă nu există evaluări
- S61 - ENPU Synthese CVSDocument9 paginiS61 - ENPU Synthese CVSBahija KOUHAILÎncă nu există evaluări
- Chap2. Analyse Des Causes de DefaillanceDocument6 paginiChap2. Analyse Des Causes de DefaillanceWijdaneÎncă nu există evaluări