S-ar putea să vă placă și
- Jerarquia Digital PlesiocronaDocument4 paginiJerarquia Digital PlesiocronaFabi QuintanaÎncă nu există evaluări
- FSKDocument5 paginiFSKFabi QuintanaÎncă nu există evaluări
- INFORME Servo MotorDocument5 paginiINFORME Servo MotorFabi QuintanaÎncă nu există evaluări
- Equipos PDHDocument10 paginiEquipos PDHFabi QuintanaÎncă nu există evaluări
- Roberto Murillo Tarea1Document23 paginiRoberto Murillo Tarea1Fabi Quintana100% (1)
- Informe Lab 3 RoboticaDocument8 paginiInforme Lab 3 RoboticaAnthony CardenasÎncă nu există evaluări
- Taller Probabilidad EstadisticaDocument3 paginiTaller Probabilidad Estadisticasolid1231100% (1)
- BANCO de Examenes de AdmisionDocument17 paginiBANCO de Examenes de AdmisionBraulio Gutierrez PariÎncă nu există evaluări
- Tema 19 - MatemáticaDocument4 paginiTema 19 - MatemáticaLokita Travieza Con AmorÎncă nu există evaluări
- Problemas Adicionales InduccionDocument2 paginiProblemas Adicionales InduccionSergio Vicente RamaÎncă nu există evaluări
- Unidad 1 Esfuerzo y DeformacionDocument13 paginiUnidad 1 Esfuerzo y Deformacionalexander izcali celaya luis100% (2)
- Tema 3 La Filosofía de La CienciaDocument8 paginiTema 3 La Filosofía de La CienciaivanÎncă nu există evaluări
- Grupo 4 Mate 16Document5 paginiGrupo 4 Mate 16tranqui sopapoÎncă nu există evaluări
- Trabajo Grupal G-52Document12 paginiTrabajo Grupal G-52Wanda CastroÎncă nu există evaluări
- Cinética Química PDFDocument45 paginiCinética Química PDFYury BeltranÎncă nu există evaluări
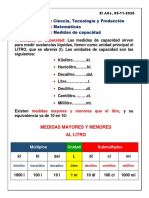
- Medidas de CapacidadDocument4 paginiMedidas de Capacidadgallo gallinate60% (5)
- Lean ManufacturingDocument19 paginiLean ManufacturingImelda Gonzalez MedinaÎncă nu există evaluări
- ENO1 Matematica Clase 2 PDFDocument24 paginiENO1 Matematica Clase 2 PDFAlejandro AguilarÎncă nu există evaluări
- LABORATORIO No. 1 - 2022Document2 paginiLABORATORIO No. 1 - 2022KENER ALEXANDER PU MEYERÎncă nu există evaluări
- Unidades de Longitus, PesoDocument32 paginiUnidades de Longitus, PesoGustavo E. Gómez F.Încă nu există evaluări
- Tesis Ingeniería PetroleraDocument51 paginiTesis Ingeniería Petrolerareynaldo garcia gonzalezÎncă nu există evaluări
- Clases ProbabilidadDocument11 paginiClases ProbabilidadeleazarÎncă nu există evaluări
- Desarrollo Nuevo 3Document4 paginiDesarrollo Nuevo 3Atilio RodrìguezÎncă nu există evaluări
- Ejercicios para EvaluaciónDocument10 paginiEjercicios para Evaluaciónbraulio avila juarezÎncă nu există evaluări
- Estadistica 1Document7 paginiEstadistica 1Paul Lopez FloresÎncă nu există evaluări
- Función AcotadaDocument3 paginiFunción AcotadaJonathan Rosales0% (1)
- Metodos NumericosDocument221 paginiMetodos NumericosRicardo Echeverría B.Încă nu există evaluări
- Trabajo Final Del Curso: Sciu-163 MatemáticaDocument12 paginiTrabajo Final Del Curso: Sciu-163 MatemáticaSebastian VillanuevaÎncă nu există evaluări
- Vector EsDocument11 paginiVector EsSamuel Aguilar GarcìaÎncă nu există evaluări
- Regla de CramerDocument2 paginiRegla de Cramermarco antonio ruizÎncă nu există evaluări
- Calculo Diferencial e Integral Unidad 2 Caso Practico YohaDocument12 paginiCalculo Diferencial e Integral Unidad 2 Caso Practico YohaYomi OcampoÎncă nu există evaluări
- Integración Multiple Calculo VectorialDocument16 paginiIntegración Multiple Calculo VectorialELIAS ALEJANDRO HERNANDEZ MARTINEZÎncă nu există evaluări
- Ing. de Reacciones Quimicas - Tarea, Ejercicio 6.14, Fogler 4ta EdicionDocument5 paginiIng. de Reacciones Quimicas - Tarea, Ejercicio 6.14, Fogler 4ta EdicionOscarOchoaÎncă nu există evaluări
- El Principio de Parsimonia en La Ciencia Cognitiva ActualDocument3 paginiEl Principio de Parsimonia en La Ciencia Cognitiva ActualJesús Román LeónÎncă nu există evaluări