S-ar putea să vă placă și
- Artificial Neural Networks for XOR FunctionDocument23 paginiArtificial Neural Networks for XOR FunctionMary MorseÎncă nu există evaluări
- Unit - I Artificial Neural NetworksDocument23 paginiUnit - I Artificial Neural NetworksMary MorseÎncă nu există evaluări
- Hebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5Document20 paginiHebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5richaÎncă nu există evaluări
- Lecture 2.1.3 - HopfieldDocument10 paginiLecture 2.1.3 - HopfieldMohd YusufÎncă nu există evaluări
- Lecture 4 - 2007 - Backpropagation - (HINTON)Document60 paginiLecture 4 - 2007 - Backpropagation - (HINTON)alan1966Încă nu există evaluări
- Busiess Analytics Data Mining Lecture 7Document37 paginiBusiess Analytics Data Mining Lecture 7utkarsh bhargavaÎncă nu există evaluări
- Chapter 4Document10 paginiChapter 4Emanuel DiegoÎncă nu există evaluări
- 3 DeltaRule PDFDocument10 pagini3 DeltaRule PDFEs EÎncă nu există evaluări
- Artificial Neural Network Supervised LearningDocument14 paginiArtificial Neural Network Supervised LearningsegnumutraÎncă nu există evaluări
- Chapter 07 Artificial Neural NetworkDocument62 paginiChapter 07 Artificial Neural NetworkRijesh ShresthaÎncă nu există evaluări
- 001 IntroDocument66 pagini001 IntromanikÎncă nu există evaluări
- شبكات عصبية ٢Document6 paginiشبكات عصبية ٢Afkir Al-HusaineÎncă nu există evaluări
- Pseudo Label FinalDocument6 paginiPseudo Label FinaljustinthecoachÎncă nu există evaluări
- Chapter 10: Artificial Neural NetworksDocument17 paginiChapter 10: Artificial Neural NetworksTran Kim ToaiÎncă nu există evaluări
- Neural Networks For Machine LearningDocument47 paginiNeural Networks For Machine LearningMohammad AlzyoudÎncă nu există evaluări
- Backpropagation Algorithm ExplainedDocument6 paginiBackpropagation Algorithm ExplainedIgnacio IriarteÎncă nu există evaluări
- Artificial Neural NetworksDocument54 paginiArtificial Neural NetworksSabin ThapaÎncă nu există evaluări
- Ar$ficial Neural Network - : Adaline and MadalineDocument22 paginiAr$ficial Neural Network - : Adaline and MadalineFaslil FawaidiÎncă nu există evaluări
- Indo German Winter Academy 2010: Multigrid MethodsDocument40 paginiIndo German Winter Academy 2010: Multigrid MethodsVesa RäisänenÎncă nu există evaluări
- CNN and Gan: Introduction ToDocument58 paginiCNN and Gan: Introduction ToGopiNath VelivelaÎncă nu există evaluări
- Lecture 1, Part 3: Training A Classifier: Roger GrosseDocument11 paginiLecture 1, Part 3: Training A Classifier: Roger GrosseShamil shihab pkÎncă nu există evaluări
- CS 478 - How Inductive Bias Helps Generalize on Novel DataDocument33 paginiCS 478 - How Inductive Bias Helps Generalize on Novel Datasaniaaisha11Încă nu există evaluări
- Artificial Neural Network (ANN) : Duration: 8 Hrs OutlineDocument61 paginiArtificial Neural Network (ANN) : Duration: 8 Hrs Outlineanhtu9_910280373Încă nu există evaluări
- Automatic Generation Control Using Artificial Neural Networks - HarkiratDocument47 paginiAutomatic Generation Control Using Artificial Neural Networks - Harkiratmalini72Încă nu există evaluări
- Model of Neuron in An ANNDocument12 paginiModel of Neuron in An ANNpolinati.vinesh2023Încă nu există evaluări
- Neural NetworksDocument42 paginiNeural NetworksTharun RaajÎncă nu există evaluări
- Machine Learning 10-701 Final Exam May 5, 2015: Obvious Exceptions For Pacemakers and Hearing AidsDocument17 paginiMachine Learning 10-701 Final Exam May 5, 2015: Obvious Exceptions For Pacemakers and Hearing AidsNithinÎncă nu există evaluări
- CS4740/5740 Introduction To NLP Fall 2017 Neural Language Models and ClassifiersDocument7 paginiCS4740/5740 Introduction To NLP Fall 2017 Neural Language Models and ClassifiersEdward LeeÎncă nu există evaluări
- Lecture-BDS-4-23-24-printDocument14 paginiLecture-BDS-4-23-24-printVictor Van der WelÎncă nu există evaluări
- Abstract Models and Neural Learning RulesDocument31 paginiAbstract Models and Neural Learning Ruleshari pukhaÎncă nu există evaluări
- Adaline and MedalineDocument14 paginiAdaline and MedalineBHAVNA AGARWAL50% (2)
- Lecture 10 Neural NetworkDocument34 paginiLecture 10 Neural NetworkMohsin IqbalÎncă nu există evaluări
- As Lecture9 NN2Document2 paginiAs Lecture9 NN2mrtfkhangÎncă nu există evaluări
- 1 - Single Layer Perceptron ANN SDocument40 pagini1 - Single Layer Perceptron ANN SDumidu GhanasekaraÎncă nu există evaluări
- Neural Network PresentationDocument33 paginiNeural Network PresentationMohd Yaseen100% (4)
- Matrix Pseudoinversion for Image Neural ProcessingDocument17 paginiMatrix Pseudoinversion for Image Neural ProcessingAtınç YılmazÎncă nu există evaluări
- 02 LearningProcessDocument38 pagini02 LearningProcessHipiijxsdjÎncă nu există evaluări
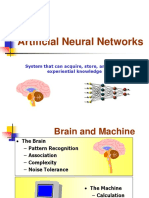
- Artificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeDocument43 paginiArtificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeUtkarsh AgarwalÎncă nu există evaluări
- Large Scale Deep LearningDocument170 paginiLarge Scale Deep Learningpavancreative81Încă nu există evaluări
- Lecun 20181015 Ihes Gomax PDFDocument109 paginiLecun 20181015 Ihes Gomax PDFlauraÎncă nu există evaluări
- L3 BackpropagationDocument61 paginiL3 BackpropagationAlimohd AslamÎncă nu există evaluări
- Logistic Regression: ClassificationDocument32 paginiLogistic Regression: Classificationesteban1815Încă nu există evaluări
- Neural Network and Fuzzy LogicDocument54 paginiNeural Network and Fuzzy Logicshreyas sr100% (1)
- Presentation On: Neural NetworkDocument30 paginiPresentation On: Neural NetworkMuhanad Al-khalisyÎncă nu există evaluări
- Simple Perceptrons: An SEO-Optimized IntroductionDocument28 paginiSimple Perceptrons: An SEO-Optimized IntroductionRishabhÎncă nu există evaluări
- Linear Regression With One Variable: Model RepresentationDocument48 paginiLinear Regression With One Variable: Model RepresentationKo Có tênÎncă nu există evaluări
- Linear Regression With One Variable: Model RepresentationDocument48 paginiLinear Regression With One Variable: Model RepresentationKo Có tênÎncă nu există evaluări
- Section 12 PDFDocument7 paginiSection 12 PDFMASHIAT MUTMAINNAHÎncă nu există evaluări
- 1234adadvklop32165adada PDFDocument55 pagini1234adadvklop32165adada PDFAbu SalehÎncă nu există evaluări
- Math Essentials for MLDocument55 paginiMath Essentials for MLAbu SalehÎncă nu există evaluări
- Math Essentials1234adadada PDFDocument55 paginiMath Essentials1234adadada PDFAbu SalehÎncă nu există evaluări
- Math Essentials1234adadvklop32165adada PDFDocument55 paginiMath Essentials1234adadvklop32165adada PDFAbu SalehÎncă nu există evaluări
- Deep Learning Nonlinear ControlDocument68 paginiDeep Learning Nonlinear ControlDaotao DaihocÎncă nu există evaluări
- Week 06 Lecture MaterialDocument46 paginiWeek 06 Lecture MaterialMeer HassanÎncă nu există evaluări
- Multi Layer Perceptron HaykinDocument50 paginiMulti Layer Perceptron HaykinAFFIFA JAHAN ANONNAÎncă nu există evaluări
- Supervised Learning Neural NetworksDocument34 paginiSupervised Learning Neural NetworksLekshmiÎncă nu există evaluări
- 1 C3 M1 L1 NeuralNetwork1-MLPDocument51 pagini1 C3 M1 L1 NeuralNetwork1-MLPHuston LAMÎncă nu există evaluări
- MachinelearninghghghgDocument17 paginiMachinelearninghghghgMaRsHallÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- CRC Understanding Digital Image Processing 1138566845 PDFDocument375 paginiCRC Understanding Digital Image Processing 1138566845 PDFWang Chen Yu100% (2)
- 15 Support Vector MachinesDocument30 pagini15 Support Vector MachinesWang Chen YuÎncă nu există evaluări
- 05b Logistic RegressionDocument20 pagini05b Logistic Regressionnikola001Încă nu există evaluări
- ML Feature Creation Selection Reduce DimensionsDocument18 paginiML Feature Creation Selection Reduce Dimensionsnikola001Încă nu există evaluări
- Machine Learning Dimensionality ReductionDocument37 paginiMachine Learning Dimensionality ReductionWang Chen YuÎncă nu există evaluări
- 08a Netflix PrizeDocument38 pagini08a Netflix PrizeWang Chen YuÎncă nu există evaluări
- 06b Discriminant AnalysisDocument18 pagini06b Discriminant AnalysisWang Chen YuÎncă nu există evaluări
- 04 Classification Basics PDFDocument68 pagini04 Classification Basics PDFWang Chen YuÎncă nu există evaluări
- 07b Regression PDFDocument24 pagini07b Regression PDFnikola001Încă nu există evaluări
- Machine Learning Machine Learning DataDocument43 paginiMachine Learning Machine Learning DataWang Chen YuÎncă nu există evaluări
- 07a Naive BayesDocument15 pagini07a Naive BayesWang Chen YuÎncă nu există evaluări
- 06c Nearest NeighborDocument17 pagini06c Nearest NeighborWang Chen YuÎncă nu există evaluări
- AC Servo ControllerDocument194 paginiAC Servo ControllerSt&fanoÎncă nu există evaluări
- Research Chapter 3Document9 paginiResearch Chapter 3Ashly MacandiliÎncă nu există evaluări
- Unit-6.PDF Analy GeoDocument21 paginiUnit-6.PDF Analy GeoSudersanaViswanathanÎncă nu există evaluări
- Chapter 9 - Areas of Parallelograms and Triangles Revision NotesDocument8 paginiChapter 9 - Areas of Parallelograms and Triangles Revision NotesHariom SinghÎncă nu există evaluări
- Summary of Grade Sheets SY2021 2022 1st 4thDocument9 paginiSummary of Grade Sheets SY2021 2022 1st 4thEdwin DagunotÎncă nu există evaluări
- Math 323: Solutions To Homework 9Document8 paginiMath 323: Solutions To Homework 9AlbertoAlcaláÎncă nu există evaluări
- Mathematics P2 Feb-March 2014 Memo Afr & EngDocument14 paginiMathematics P2 Feb-March 2014 Memo Afr & Engaleck mthethwaÎncă nu există evaluări
- Integration TechniquesDocument45 paginiIntegration TechniquesMustafa SHAHZADÎncă nu există evaluări
- June 2012 QP - M1 EdexcelDocument13 paginiJune 2012 QP - M1 EdexcelSaiyara KhanÎncă nu există evaluări
- Systems of Inequalities Solved(MathDocument25 paginiSystems of Inequalities Solved(MathEd VillÎncă nu există evaluări
- Coin Online Survey Questionaire Writing Implements: Engineering Data Analysis 1Document7 paginiCoin Online Survey Questionaire Writing Implements: Engineering Data Analysis 1Samantha SamanthaÎncă nu există evaluări
- Christoph Reinhart: L12 Thermal Mass and Heat FlowDocument64 paginiChristoph Reinhart: L12 Thermal Mass and Heat FlowT N Roland BourgeÎncă nu există evaluări
- (Ggplot2 Data Visualization) Alboukadel Kassambara - Guide To Create Beautiful Graphics in R-STHDA (2013) PDFDocument238 pagini(Ggplot2 Data Visualization) Alboukadel Kassambara - Guide To Create Beautiful Graphics in R-STHDA (2013) PDFGrasiela SantanaÎncă nu există evaluări
- Tests On RocksDocument27 paginiTests On RocksdeadromeoÎncă nu există evaluări
- Thermodynamics FundamentalsDocument40 paginiThermodynamics Fundamentalsengineer63Încă nu există evaluări
- Lesson Plan Template 20170831 Mathematical InductionDocument2 paginiLesson Plan Template 20170831 Mathematical Inductionapi-367457807100% (1)
- Malvern Usp 429Document237 paginiMalvern Usp 429Dimitris PapamatthaiakisÎncă nu există evaluări
- CS6005 Advanced Database System UNIT III ADocument164 paginiCS6005 Advanced Database System UNIT III Avenkatarangan rajuluÎncă nu există evaluări
- Heat Conduction - Basic ResearchDocument362 paginiHeat Conduction - Basic ResearchJosé Ramírez100% (1)
- Electrical Engineering - Frame WorkDocument10 paginiElectrical Engineering - Frame WorkMocharu ArtÎncă nu există evaluări
- Control and energy management of a pumping systemDocument16 paginiControl and energy management of a pumping systemhassenbbÎncă nu există evaluări
- Ac7101 3DDocument24 paginiAc7101 3DNamelezz ShadowwÎncă nu există evaluări
- Mod Exam Mah PDFDocument3 paginiMod Exam Mah PDFjaja riveraÎncă nu există evaluări
- Lecture21 PracticeSheetDocument9 paginiLecture21 PracticeSheetChaudhuriSartazAllahwalaÎncă nu există evaluări
- 3.1 External Forced Convection PDFDocument32 pagini3.1 External Forced Convection PDFJackson TeohÎncă nu există evaluări
- Grade 7 Math Practice Test 2013 2014Document44 paginiGrade 7 Math Practice Test 2013 2014Natalie MuslehÎncă nu există evaluări
- Deck Slab LSD (12.9m) - 14mDocument17 paginiDeck Slab LSD (12.9m) - 14mGaurav SinghÎncă nu există evaluări
- Automatic Parallel Parking System ReportDocument23 paginiAutomatic Parallel Parking System ReportFrances Ekenedilichukwu Awachie50% (2)
- MATH 6 PPT Q3 - Translation of Real-Life Verbal Expressions and Equations Into Letters or SymbolsDocument28 paginiMATH 6 PPT Q3 - Translation of Real-Life Verbal Expressions and Equations Into Letters or SymbolsAlbert MarzanÎncă nu există evaluări
- Ism Chapter 25Document121 paginiIsm Chapter 25Sergio Serrano ReyesÎncă nu există evaluări
- Btech Ip 6th SemDocument11 paginiBtech Ip 6th SemSoumya SoniÎncă nu există evaluări