S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
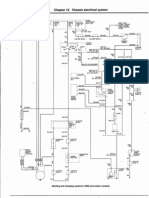
- Mitsubishi Galant Lancer - Wiring Diagrams 1994-2003Document43 paginiMitsubishi Galant Lancer - Wiring Diagrams 1994-2003Joseph Romero86% (14)
- 25 - E65-66 IhkaDocument55 pagini25 - E65-66 IhkaKent WaiÎncă nu există evaluări
- RealmctubeDocument15 paginiRealmctubeToM100% (6)
- Audi A4 B8 VCDS Codings PDFDocument10 paginiAudi A4 B8 VCDS Codings PDFcosteniuc100% (3)
- Lab Manual Switchgear and Protection SapDocument46 paginiLab Manual Switchgear and Protection SapYash MaheshwariÎncă nu există evaluări
- 2GCS638015A0070-ESI Inverter Solutions For Battery Energy Storage ApplicationsDocument28 pagini2GCS638015A0070-ESI Inverter Solutions For Battery Energy Storage ApplicationsANDYAFANADORÎncă nu există evaluări
- Turbine Lub Oil SystemDocument15 paginiTurbine Lub Oil SystemNitish Kumar100% (1)
- HT Panel Details at Substation Side BOMDocument1 paginăHT Panel Details at Substation Side BOMRising Trans Infra SolutionsÎncă nu există evaluări
- Model Question Bank PsocDocument10 paginiModel Question Bank PsocsangeetadineshÎncă nu există evaluări
- Pillai HOC College of Engineering & Technology, RasayaniDocument11 paginiPillai HOC College of Engineering & Technology, RasayanisangeetadineshÎncă nu există evaluări
- Sr. No Name of The Department Title of Programme Faculty in Charge Date and DurationDocument2 paginiSr. No Name of The Department Title of Programme Faculty in Charge Date and DurationsangeetadineshÎncă nu există evaluări
- Generator Filed: Title: Rev: Date: Sheet: Easyeda V4.7.8 Drawn byDocument1 paginăGenerator Filed: Title: Rev: Date: Sheet: Easyeda V4.7.8 Drawn bysangeetadineshÎncă nu există evaluări
- Question Bank: Control System-Ii Semester VIIDocument8 paginiQuestion Bank: Control System-Ii Semester VIIsangeetadineshÎncă nu există evaluări
- Pillai HOC College of Engineering and Technology: Mahatma Education Society'sDocument1 paginăPillai HOC College of Engineering and Technology: Mahatma Education Society'ssangeetadineshÎncă nu există evaluări
- Pillai HOC College of Engineering and Technology: Mahatma Education Society'sDocument1 paginăPillai HOC College of Engineering and Technology: Mahatma Education Society'ssangeetadineshÎncă nu există evaluări
- Anti Ragging 3rd AmendmentDocument2 paginiAnti Ragging 3rd AmendmentsangeetadineshÎncă nu există evaluări
- List of ExperimentsDocument27 paginiList of ExperimentssangeetadineshÎncă nu există evaluări
- ODD SEM Offline Cap 27 DEC 2017Document98 paginiODD SEM Offline Cap 27 DEC 2017sangeetadineshÎncă nu există evaluări
- Logical and Quantitative Reasoning, Basic Data Interpretation and Basic Mathematics5Document4 paginiLogical and Quantitative Reasoning, Basic Data Interpretation and Basic Mathematics5sangeetadineshÎncă nu există evaluări
- Circular: Pillai HOC College of Engineering and TechnologyDocument1 paginăCircular: Pillai HOC College of Engineering and TechnologysangeetadineshÎncă nu există evaluări
- Model Question Bank - EDCDocument12 paginiModel Question Bank - EDCsangeetadineshÎncă nu există evaluări
- Year Name of The Non Government Funding Agencies/ IndividualsDocument2 paginiYear Name of The Non Government Funding Agencies/ IndividualssangeetadineshÎncă nu există evaluări
- CO801.1 CO801.2 CO801.3 CO801.4 CO801.5 CO801.6: Co For HVDC Transmission of Sem Vii CO StatementDocument14 paginiCO801.1 CO801.2 CO801.3 CO801.4 CO801.5 CO801.6: Co For HVDC Transmission of Sem Vii CO StatementsangeetadineshÎncă nu există evaluări
- Naac Criterion 2,1Document234 paginiNaac Criterion 2,1sangeetadineshÎncă nu există evaluări
- Department of Electrical Engineering Oral/Practical Schedule 30 October To 05 NovemberDocument3 paginiDepartment of Electrical Engineering Oral/Practical Schedule 30 October To 05 NovembersangeetadineshÎncă nu există evaluări
- MCQDocument99 paginiMCQsangeetadineshÎncă nu există evaluări
- Year Title of The Professional Development Program Number of Teachers Who AttendedDocument9 paginiYear Title of The Professional Development Program Number of Teachers Who AttendedsangeetadineshÎncă nu există evaluări
- Pillai HOC College of Engineering and Technology, RasayaniDocument28 paginiPillai HOC College of Engineering and Technology, RasayanisangeetadineshÎncă nu există evaluări
- Department of Electrical Engineering Oral/Practical Schedule 30 October To 05 NovemberDocument2 paginiDepartment of Electrical Engineering Oral/Practical Schedule 30 October To 05 NovembersangeetadineshÎncă nu există evaluări
- Nba Final Data of Entrance Score & Lateral EntryDocument1 paginăNba Final Data of Entrance Score & Lateral EntrysangeetadineshÎncă nu există evaluări
- Pillai HOC College of Engineering & Technology, Rasayani Unit Test-IiDocument2 paginiPillai HOC College of Engineering & Technology, Rasayani Unit Test-IisangeetadineshÎncă nu există evaluări
- CO305.1 CO305.2 CO305.3 CO305.4 CO305.5 CO305.6: CO FOR Electrical Machines-II OF SEM-V CO StatementDocument16 paginiCO305.1 CO305.2 CO305.3 CO305.4 CO305.5 CO305.6: CO FOR Electrical Machines-II OF SEM-V CO StatementsangeetadineshÎncă nu există evaluări
- Dept of Electrical EnggDocument1 paginăDept of Electrical EnggsangeetadineshÎncă nu există evaluări
- Viewsonic IFP8662 IFP62 UG ENGDocument141 paginiViewsonic IFP8662 IFP62 UG ENGpedrodiasmendesÎncă nu există evaluări
- M/V Mamola Melody: Multi Purpose Supply Vessel Accommodation & Maintenance Support Fifi 1 / 4PmDocument4 paginiM/V Mamola Melody: Multi Purpose Supply Vessel Accommodation & Maintenance Support Fifi 1 / 4PmCandisftÎncă nu există evaluări
- Eee DepartmentDocument11 paginiEee DepartmentAriston EtormaÎncă nu există evaluări
- ServiceManual CTV2131PFDVDDocument44 paginiServiceManual CTV2131PFDVDcroefus9525100% (1)
- Technical Specification STS-6000K-H1 13.8kV 60Hz For 200 - 215KTL - V6.0Document18 paginiTechnical Specification STS-6000K-H1 13.8kV 60Hz For 200 - 215KTL - V6.0Antonio CanalesÎncă nu există evaluări
- Zwick Armaturen GMBH - Company ProfileDocument2 paginiZwick Armaturen GMBH - Company ProfileEhsan Ur RehmanÎncă nu există evaluări
- Cycle Test I Ec 1301 MPMCDocument1 paginăCycle Test I Ec 1301 MPMCtmuthu123Încă nu există evaluări
- En Cat RD2 010 PDFDocument136 paginiEn Cat RD2 010 PDFJi Hwan ParkÎncă nu există evaluări
- 2d Insulation Resistance Monitor 6Document6 pagini2d Insulation Resistance Monitor 6john smithÎncă nu există evaluări
- Three Point and Four Point StarterDocument7 paginiThree Point and Four Point Starterkaran nirmala gajanan shindeÎncă nu există evaluări
- Instruction Manual AK-157Document10 paginiInstruction Manual AK-157Kalim KamÎncă nu există evaluări
- Fronius IG Plus PDFDocument6 paginiFronius IG Plus PDFKirsten HernandezÎncă nu există evaluări
- Substitutionguide NS NSX en NLDocument40 paginiSubstitutionguide NS NSX en NLdkompogiorgasÎncă nu există evaluări
- ZBV - Automation GMBHDocument415 paginiZBV - Automation GMBHREMUSÎncă nu există evaluări
- Report GSM Based Remote Monitoring of 3 Parameters On TransformersDocument16 paginiReport GSM Based Remote Monitoring of 3 Parameters On TransformersJilly ArasuÎncă nu există evaluări
- Arnes 1Document2 paginiArnes 1Ivan PalominoÎncă nu există evaluări
- Agreement For Company Laptop Govindaraj BabuDocument1 paginăAgreement For Company Laptop Govindaraj Babusuresh prakasamÎncă nu există evaluări
- Electronic Systems and Design - Quiz 1FDocument5 paginiElectronic Systems and Design - Quiz 1FAshly EspaldonÎncă nu există evaluări
- Placa PC Chip M909Document64 paginiPlaca PC Chip M909michigato100% (1)
- Catalogue of Insulator and Surge Arrester - Orient ChinaDocument66 paginiCatalogue of Insulator and Surge Arrester - Orient Chinapham thang0% (1)
- Mls 2300 AcdcDocument26 paginiMls 2300 AcdcCesar ObesoÎncă nu există evaluări
- IPS2000 Mifare IC Card Parking System PDFDocument4 paginiIPS2000 Mifare IC Card Parking System PDFGabriel LunaÎncă nu există evaluări