S-ar putea să vă placă și
- Nama: Muhammad Yunus Suryana NIM: 183133028: Analisa StrukturDocument10 paginiNama: Muhammad Yunus Suryana NIM: 183133028: Analisa StrukturMoch Yunus SuryanaÎncă nu există evaluări
- Lecture # 22Document13 paginiLecture # 22VaridGuptaÎncă nu există evaluări
- Marco Vardaro - PHD Thesis - 2018 01 14 (137-143)Document7 paginiMarco Vardaro - PHD Thesis - 2018 01 14 (137-143)mjd rÎncă nu există evaluări
- 3.fhe CoomecDocument2 pagini3.fhe CoomecJasmin CardenasÎncă nu există evaluări
- Din 17102 PDFDocument10 paginiDin 17102 PDFEvriMert RüzgArdaÎncă nu există evaluări
- Tutorial 2 UpdatedDocument3 paginiTutorial 2 UpdatedrishikakhashuÎncă nu există evaluări
- LMTD Correction Factor ChartsDocument3 paginiLMTD Correction Factor ChartsMochammad ReshaÎncă nu există evaluări
- D Part 59Document1 paginăD Part 59Mark24_12Încă nu există evaluări
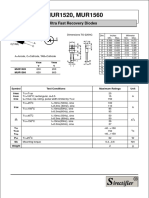
- Mur 1560Document3 paginiMur 1560cesarÎncă nu există evaluări
- Data Sheet MUR 1520, MUR 1560Document3 paginiData Sheet MUR 1520, MUR 1560Rifadi ArdiansyahÎncă nu există evaluări
- ICE MIT Lec6Document5 paginiICE MIT Lec6darafehÎncă nu există evaluări
- Krakatau-PosCo Plate ISDocument1 paginăKrakatau-PosCo Plate ISanugerah.semesta.enterprise.ptÎncă nu există evaluări
- General purpose BC817 transistors guideDocument3 paginiGeneral purpose BC817 transistors guideteixeiramotorÎncă nu există evaluări
- pedestal.1Document3 paginipedestal.1EakJhuanÎncă nu există evaluări
- Estimates Differences T-T90 2010Document3 paginiEstimates Differences T-T90 2010Alexander MartinezÎncă nu există evaluări
- Ent Sal Sal Ent - 1 - 1: Despl Hot, Real Hot, Intervalo Hot, graf-CC Cold, Real Cold, IntervaloDocument24 paginiEnt Sal Sal Ent - 1 - 1: Despl Hot, Real Hot, Intervalo Hot, graf-CC Cold, Real Cold, IntervaloAngela Mata SanchezÎncă nu există evaluări
- HCPL2731Document1 paginăHCPL2731Naur AvilaÎncă nu există evaluări
- LabView IntroDocument5 paginiLabView IntroTimothy XiongÎncă nu există evaluări
- Refrigeration System Performance Data SheetDocument2 paginiRefrigeration System Performance Data Sheetsiaga 1Încă nu există evaluări
- pósterSECYTA 2004def2Document1 paginăpósterSECYTA 2004def2susanita.2418Încă nu există evaluări
- Parametri Na CelikotDocument1 paginăParametri Na CelikotVasilija KosteskaÎncă nu există evaluări
- Plots 2015 4 4Document90 paginiPlots 2015 4 4Daniel TapiaÎncă nu există evaluări
- TACB-2643.344SNDocument2 paginiTACB-2643.344SNIsaac Vázquez YáñezÎncă nu există evaluări
- Plots 2015 8 17Document3 paginiPlots 2015 8 17Daniel TapiaÎncă nu există evaluări
- Convert or SDocument9 paginiConvert or SFatima Muhammad SaleemÎncă nu există evaluări
- HW 5Document9 paginiHW 5karthikÎncă nu există evaluări
- TG S50 PDFDocument1 paginăTG S50 PDFIvan RocoÎncă nu există evaluări
- SOT-23 Bipolar Transistor SpecsDocument2 paginiSOT-23 Bipolar Transistor SpecsAdnan AliÎncă nu există evaluări
- Tugas AS42Document16 paginiTugas AS42Danu KurniawanÎncă nu există evaluări
- Summarizing Recent Work On TE Materials: Ran HeDocument17 paginiSummarizing Recent Work On TE Materials: Ran HeRan HeÎncă nu există evaluări
- Trabajo EstaticaDocument6 paginiTrabajo EstaticaCESAR EDUARDO CARBONEL ESCOBEDOÎncă nu există evaluări
- Chemical Composition Raw Material Grade: Ref - No JSPL/ANGUL/TDC-003493C Rev. 1 Date of Issue 11/11/2022Document3 paginiChemical Composition Raw Material Grade: Ref - No JSPL/ANGUL/TDC-003493C Rev. 1 Date of Issue 11/11/2022MAHESH BELEÎncă nu există evaluări
- Time (UTC)Document3 paginiTime (UTC)Daniel TapiaÎncă nu există evaluări
- Mathcad MeytaDocument9 paginiMathcad MeytameytaÎncă nu există evaluări
- Substitute Rlof Eq - 1 Eq - 2 I: B A B B ADocument3 paginiSubstitute Rlof Eq - 1 Eq - 2 I: B A B B ACelo GontiñasÎncă nu există evaluări
- Inchang ElectronicsDocument5 paginiInchang ElectronicsVicenteAMartinezGÎncă nu există evaluări
- MJE340 Power TransistorDocument5 paginiMJE340 Power TransistorKatherin Angel DuqueÎncă nu există evaluări
- Technical Data Basonetic 4035 051010 PDFDocument8 paginiTechnical Data Basonetic 4035 051010 PDFsamsonit1100% (1)
- Cálculos Y Resultados I (A) Cotg ( ) 0 0 0.2 0.9004 0.5 1.8417 0.7 2.475 1 3.4874 1.3 4.7046 1.5 5.6712Document4 paginiCálculos Y Resultados I (A) Cotg ( ) 0 0 0.2 0.9004 0.5 1.8417 0.7 2.475 1 3.4874 1.3 4.7046 1.5 5.6712Rodrigo Sebastian Roman TÎncă nu există evaluări
- Ent Sal Sal Ent - 1 - 1: Despl Hot, Real Hot, Intervalo Hot, graf-CC Cold, Real Cold, IntervaloDocument44 paginiEnt Sal Sal Ent - 1 - 1: Despl Hot, Real Hot, Intervalo Hot, graf-CC Cold, Real Cold, IntervaloAngela Mata SanchezÎncă nu există evaluări
- Heat Exchanger Design OptimizationDocument49 paginiHeat Exchanger Design OptimizationAngela Mata SanchezÎncă nu există evaluări
- You Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterDocument1 paginăYou Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterJOSE LOZADA MENDIETAÎncă nu există evaluări
- Ent Sal Sal Ent - 1 - 1: Despl Hot, Real Hot, Intervalo Hot, graf-CC Cold, Real Cold, IntervaloDocument56 paginiEnt Sal Sal Ent - 1 - 1: Despl Hot, Real Hot, Intervalo Hot, graf-CC Cold, Real Cold, IntervaloAngela Mata SanchezÎncă nu există evaluări
- Contoh Soal FRAME 2DDocument7 paginiContoh Soal FRAME 2DDendi Rizki PrabowoÎncă nu există evaluări
- Ec 8 Seismic AnalysisDocument1 paginăEc 8 Seismic AnalysisCSEC Uganda Ltd.Încă nu există evaluări
- 2n7002 Sot-23 PanjitDocument8 pagini2n7002 Sot-23 PanjitKST5Încă nu există evaluări
- Ent Sal Sal Ent - 1 - 1: Despl Hot, Real Hot, Intervalo Hot, graf-CC Cold, Real Cold, IntervaloDocument64 paginiEnt Sal Sal Ent - 1 - 1: Despl Hot, Real Hot, Intervalo Hot, graf-CC Cold, Real Cold, IntervaloAngela Mata SanchezÎncă nu există evaluări
- Problem30 71Document1 paginăProblem30 71IENCSÎncă nu există evaluări
- Espectro de Diseño Cfe 2015: 0 R Ctor de Importancia R 0Document10 paginiEspectro de Diseño Cfe 2015: 0 R Ctor de Importancia R 0Ernesto Feliciano Basurto GalvezÎncă nu există evaluări
- Certificate of Analysis: Research MetallurgyDocument3 paginiCertificate of Analysis: Research MetallurgySaravanan PÎncă nu există evaluări
- Seismic Force CANADA Code - CNBC2005-V421Document7 paginiSeismic Force CANADA Code - CNBC2005-V421Niko NištićÎncă nu există evaluări
- Hermetic Silicon PhototransistorDocument5 paginiHermetic Silicon PhototransistorRahul SushruthÎncă nu există evaluări
- CCO2, G Vs T: VARIASI C Alga, L, 0 0.05 0.1 0.2 0.3 0.4Document5 paginiCCO2, G Vs T: VARIASI C Alga, L, 0 0.05 0.1 0.2 0.3 0.4Azhar AdityaÎncă nu există evaluări
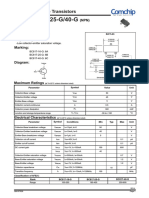
- General Purpose Transistor: Rohs Device (PNP)Document4 paginiGeneral Purpose Transistor: Rohs Device (PNP)TobalElectronicaÎncă nu există evaluări
- Thermodynamic Analysis of a Heat EngineDocument4 paginiThermodynamic Analysis of a Heat EngineVidushee GeetamÎncă nu există evaluări
- BEAM DESIGN - RSLT - Member - Detail - 1 - 1 - 348Document22 paginiBEAM DESIGN - RSLT - Member - Detail - 1 - 1 - 348CSEC Uganda Ltd.Încă nu există evaluări
- Digital transistors guideDocument3 paginiDigital transistors guideMasUd MzÎncă nu există evaluări
- W,: FR - Oes - 3.4c A + 3 Scll. 1w6ff !NL,: W R: Csczocv Fi (O.oso',', 6 + 0.93405cn T+ J)Document7 paginiW,: FR - Oes - 3.4c A + 3 Scll. 1w6ff !NL,: W R: Csczocv Fi (O.oso',', 6 + 0.93405cn T+ J)Ante CrnicaÎncă nu există evaluări
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDe la EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsÎncă nu există evaluări
- RLocus - Analysis - Design 4 PDFDocument1 paginăRLocus - Analysis - Design 4 PDFas dds aaadÎncă nu există evaluări
- Root Locus Analysis & Design: A Designer Would LikeDocument1 paginăRoot Locus Analysis & Design: A Designer Would Likeas dds aaadÎncă nu există evaluări
- RLocus Analysis Design 5Document1 paginăRLocus Analysis Design 5as dds aaadÎncă nu există evaluări
- Book 288Document1 paginăBook 288as dds aaadÎncă nu există evaluări
- Book 286Document1 paginăBook 286as dds aaadÎncă nu există evaluări
- RLocus Analysis Design 3Document1 paginăRLocus Analysis Design 3as dds aaadÎncă nu există evaluări
- RLocus Analysis Design 2Document1 paginăRLocus Analysis Design 2as dds aaadÎncă nu există evaluări
- Book 290Document1 paginăBook 290as dds aaadÎncă nu există evaluări
- Book 291Document1 paginăBook 291as dds aaadÎncă nu există evaluări
- Book 289Document1 paginăBook 289as dds aaadÎncă nu există evaluări
- Book 283Document1 paginăBook 283as dds aaadÎncă nu există evaluări
- Book 287Document1 paginăBook 287as dds aaadÎncă nu există evaluări
- Fig. 7.23d Chap. 9 Table 4.1: 1 2 D 2 1 2 2 N 2 2 N 2 NDocument1 paginăFig. 7.23d Chap. 9 Table 4.1: 1 2 D 2 1 2 2 N 2 2 N 2 Nas dds aaadÎncă nu există evaluări
- Book 285Document1 paginăBook 285as dds aaadÎncă nu există evaluări
- Book 282Document1 paginăBook 282as dds aaadÎncă nu există evaluări
- MR1531 AppdDocument2 paginiMR1531 Appdsdsds-54Încă nu există evaluări
- Book 284Document1 paginăBook 284as dds aaadÎncă nu există evaluări
- Book 280Document1 paginăBook 280as dds aaadÎncă nu există evaluări
- PaperC - 7148 3Document1 paginăPaperC - 7148 3as dds aaadÎncă nu există evaluări
- Book 279Document1 paginăBook 279as dds aaadÎncă nu există evaluări
- Book 277Document1 paginăBook 277as dds aaadÎncă nu există evaluări
- Book 281Document1 paginăBook 281as dds aaadÎncă nu există evaluări
- Book 278Document1 paginăBook 278as dds aaadÎncă nu există evaluări
- Pages From Scan006Document6 paginiPages From Scan006as dds aaadÎncă nu există evaluări
- PaperC - 7148 4Document1 paginăPaperC - 7148 4as dds aaadÎncă nu există evaluări
- MR1531 TabsDocument1 paginăMR1531 Tabssdsds-54Încă nu există evaluări
- Analysis: Simulation The System Parameters EffectsDocument1 paginăAnalysis: Simulation The System Parameters Effectsas dds aaadÎncă nu există evaluări
- Abbreviations and Acronyms: Fundamentals of Power System EconomicsDocument1 paginăAbbreviations and Acronyms: Fundamentals of Power System Economicsas dds aaadÎncă nu există evaluări
- MR1531 PrefDocument2 paginiMR1531 Prefsdsds-54Încă nu există evaluări
- Quiz SE 01 SolutionDocument4 paginiQuiz SE 01 SolutionnasrullahdharejoÎncă nu există evaluări
- Anurag Kumar Kachhala: Android Application DeveloperDocument4 paginiAnurag Kumar Kachhala: Android Application DeveloperAlbin CRÎncă nu există evaluări
- L2 - The People in Information SystemsDocument28 paginiL2 - The People in Information SystemsThiên Ý VõÎncă nu există evaluări
- BA Skills Assessment Tasks TechniquesDocument3 paginiBA Skills Assessment Tasks TechniquesDanai PiyaÎncă nu există evaluări
- AgileDoc Standard Report Template Library For DeltaVDocument2 paginiAgileDoc Standard Report Template Library For DeltaVMiguel AlvarezÎncă nu există evaluări
- Namaste Javascript NotesDocument68 paginiNamaste Javascript NotesbedahutiÎncă nu există evaluări
- Ooad Unit 3Document121 paginiOoad Unit 3Charveer “CHARVEERTV” tvÎncă nu există evaluări
- Pentest ReportDocument19 paginiPentest ReportMuhammad Awais100% (1)
- Medical Shop Management A Project Report: Submitted byDocument42 paginiMedical Shop Management A Project Report: Submitted byyuvaraj yuviÎncă nu există evaluări
- Lab 5Document8 paginiLab 5MilsonÎncă nu există evaluări
- Pure Script BookDocument232 paginiPure Script Bookanon_938817900Încă nu există evaluări
- 2.react Native Components and PropsDocument57 pagini2.react Native Components and Propsdvc9gfhd96Încă nu există evaluări
- Camshaft and Rocker Shaft AssembliesDocument22 paginiCamshaft and Rocker Shaft AssembliesHamilton Miranda100% (1)
- Static Keyword JavaDocument8 paginiStatic Keyword JavaGolmei ShaheamÎncă nu există evaluări
- OOP. Meaning of A TypeDocument33 paginiOOP. Meaning of A TypeKushner SergeÎncă nu există evaluări
- Introduction (UDDI)Document41 paginiIntroduction (UDDI)Jayson ImperialÎncă nu există evaluări
- Hindi - PM PresentationDocument12 paginiHindi - PM PresentationPrashant MishraÎncă nu există evaluări
- Usb Cam LogDocument1 paginăUsb Cam LogDunia ikanÎncă nu există evaluări
- Stock Coupler TestDocument4 paginiStock Coupler TestManoÎncă nu există evaluări
- SoftwareDocument7 paginiSoftwareAIMAN SUBHANÎncă nu există evaluări
- Ford Power Stroke 6.0l EngDocument101 paginiFord Power Stroke 6.0l Engjads301179100% (5)
- 08 - 2.3.1 - Defensive - Design - MCQs - Lesson 1 - v1Document7 pagini08 - 2.3.1 - Defensive - Design - MCQs - Lesson 1 - v1nouse glÎncă nu există evaluări
- Study Guide Ch04 TB StudentDocument7 paginiStudy Guide Ch04 TB StudentAlejandro Ramirez100% (1)
- Quasiturbine Engine FinalDocument17 paginiQuasiturbine Engine FinalChandan GuleriaÎncă nu există evaluări
- Ultrasonic sensor operating instructionsDocument5 paginiUltrasonic sensor operating instructionsdachinicuÎncă nu există evaluări
- MPFIDocument19 paginiMPFIAmitKumarÎncă nu există evaluări
- Mtu Engine 8v2000m41a Parts Catalog - 531101840-1Document257 paginiMtu Engine 8v2000m41a Parts Catalog - 531101840-1Kevin Burke100% (3)
- State Chart Diagram in UMLDocument4 paginiState Chart Diagram in UMLHorlars LeeÎncă nu există evaluări
- Manual: Tricore Debugger and TraceDocument139 paginiManual: Tricore Debugger and TraceAakash DeepÎncă nu există evaluări
- Assessment - 2 - Cyber - Security - by - Bigyan WORDDocument13 paginiAssessment - 2 - Cyber - Security - by - Bigyan WORDFanny OjedaÎncă nu există evaluări