S-ar putea să vă placă și
- Compte Rendu: Université de MédéaDocument16 paginiCompte Rendu: Université de Médéamou tiemÎncă nu există evaluări
- Pendule Couples - Docx Version 1Document17 paginiPendule Couples - Docx Version 1CHERIFI CHERIFÎncă nu există evaluări
- Pendule CouplesDocument6 paginiPendule CouplesNasr ÄllahÎncă nu există evaluări
- Le Pendule Tournant de PohlDocument11 paginiLe Pendule Tournant de PohlKacimo Odine100% (1)
- Le Pendule Tournant de PohlDocument11 paginiLe Pendule Tournant de Pohlfati100% (1)
- Pendule CoupléDocument8 paginiPendule Coupléعالم المعرفة69% (16)
- TP 4 - Loi de NewtonDocument10 paginiTP 4 - Loi de NewtonAbderrahmane100% (3)
- TP Corde Vibrante PDFDocument3 paginiTP Corde Vibrante PDFAmani Rebai100% (1)
- Pendule OscillantDocument12 paginiPendule OscillantRad Ouan100% (1)
- 3 Pendule SimpleDocument18 pagini3 Pendule SimplebngÎncă nu există evaluări
- TP Ondes Et VibrationsDocument2 paginiTP Ondes Et VibrationsCHEL TAK100% (1)
- PENDULE COUPLES (Ecoles)Document25 paginiPENDULE COUPLES (Ecoles)Sofiane Mehadji100% (2)
- 1-Etude de Deux Pendules Couples Par Un RessortDocument4 pagini1-Etude de Deux Pendules Couples Par Un Ressortdodo sisi100% (1)
- TP 1-Le Pendule SimpleDocument7 paginiTP 1-Le Pendule SimpleNna DiaÎncă nu există evaluări
- Circuit CoupleDocument8 paginiCircuit Coupleمحمد امين شريف0% (2)
- TP4 Pendule Bifilaire - 1 PDFDocument8 paginiTP4 Pendule Bifilaire - 1 PDFAnes TlemcenÎncă nu există evaluări
- Pendule BifilaireDocument7 paginiPendule BifilaireMeriem ChÎncă nu există evaluări
- Pendule de Pohl (Réparé) .Docx Version 1Document16 paginiPendule de Pohl (Réparé) .Docx Version 1Mr AhmedÎncă nu există evaluări
- Compte Rendu TP4 Pendule Elastique PDFDocument5 paginiCompte Rendu TP4 Pendule Elastique PDFOussama hartley100% (1)
- tp3 Corde VibrDocument12 paginitp3 Corde VibrMr AhmedÎncă nu există evaluări
- Pendule SimpleDocument18 paginiPendule SimplePablo Emilio100% (1)
- 11 Pendule SimpleDocument2 pagini11 Pendule SimpleChartier Julien100% (5)
- TP Circuit Couplé PDFDocument3 paginiTP Circuit Couplé PDFChikhaoui AbdellahÎncă nu există evaluări
- TP Vibrations Et Ondes FinalDocument23 paginiTP Vibrations Et Ondes FinalMeriem Hacini67% (3)
- Tp3 TorsionDocument5 paginiTp3 TorsionOmar Khayem Cherif100% (1)
- Pendule TorsionDocument9 paginiPendule TorsionYoussef EL78% (23)
- Mecanique TP 1 Compte Rendu (V 1)Document7 paginiMecanique TP 1 Compte Rendu (V 1)mayssam benmim100% (1)
- Compte Rendu CollisionsDocument9 paginiCompte Rendu CollisionsVladimir SavuÎncă nu există evaluări
- TP Physique N°02Document8 paginiTP Physique N°02Mallek DjelabÎncă nu există evaluări
- BifilaireDocument5 paginiBifilairenora100% (4)
- Pendules CouplesDocument22 paginiPendules CouplesAbdessadek HamdaouiÎncă nu există evaluări
- TP OV Mosbah Sid Ahmed G21 Corde VibranteDocument6 paginiTP OV Mosbah Sid Ahmed G21 Corde VibranteMr AhmedÎncă nu există evaluări
- TP3 DE PHY (Pendule Simple) PDFDocument5 paginiTP3 DE PHY (Pendule Simple) PDFĶħễ LīfäÎncă nu există evaluări
- TP 04 Pendule de TorsionDocument4 paginiTP 04 Pendule de Torsionfati78% (18)
- TP2 2EME LOI DE NEWTON (Univ-Jijel) PDFDocument7 paginiTP2 2EME LOI DE NEWTON (Univ-Jijel) PDFAbderrahmane71% (7)
- Compte-Rendu TP 2Document6 paginiCompte-Rendu TP 2Kubrick Stanislas100% (2)
- TP 3 - Chut LibreDocument9 paginiTP 3 - Chut LibreAbderrahmaneÎncă nu există evaluări
- TP Vom Compte Rendu Cordes VibrantesDocument3 paginiTP Vom Compte Rendu Cordes VibrantesFeniX 4 everÎncă nu există evaluări
- TP Pendule SimpleDocument6 paginiTP Pendule Simpleben fayssal100% (1)
- Pendule SimpleDocument18 paginiPendule SimpleHakim Hent-fr65% (17)
- Détermination de La Constante de PlanckDocument6 paginiDétermination de La Constante de PlanckSALMA FITRIÎncă nu există evaluări
- TP 1 2019-2020Document5 paginiTP 1 2019-2020fashionista louli0% (1)
- 12 Pendule Elastique CorrectionDocument2 pagini12 Pendule Elastique CorrectionChartier Julien90% (10)
- TP 2 EmeDocument9 paginiTP 2 Ememou tiem100% (1)
- 1S TP Physique Chute Libre Conservation EM W Poids EleveDocument3 pagini1S TP Physique Chute Libre Conservation EM W Poids Elevetahaaassosse83% (6)
- TP N Ondes Et Vibrations PDFDocument26 paginiTP N Ondes Et Vibrations PDFfedlaoui67% (3)
- TP Physique #10C, Le Pendule Simple, CorrectionDocument6 paginiTP Physique #10C, Le Pendule Simple, CorrectionMohandRahim100% (1)
- Pendule BiffilaireDocument10 paginiPendule Biffilaireمحمد امين شريف67% (9)
- Vibration TP Nâ°2 Oscillations Amorties 2Document11 paginiVibration TP Nâ°2 Oscillations Amorties 2Yenje DehanÎncă nu există evaluări
- Vibration TP N°1Document8 paginiVibration TP N°1Mŏïse LùkăsÎncă nu există evaluări
- Apou 1Document7 paginiApou 1hylaayatÎncă nu există evaluări
- T.P22 Ecole National Superieur de TéchnologieDocument8 paginiT.P22 Ecole National Superieur de TéchnologieChellali RabahÎncă nu există evaluări
- Pour 3Document8 paginiPour 3hylaayatÎncă nu există evaluări
- Compte RenduDocument14 paginiCompte RenduHanan KHEZOUÎncă nu există evaluări
- Correction TD Chapitre 4Document20 paginiCorrection TD Chapitre 4nour.elbezÎncă nu există evaluări
- Ua AuraNadivaSalsabilla 2021210072Document29 paginiUa AuraNadivaSalsabilla 2021210072Auraa Nadiva SalsabillaÎncă nu există evaluări
- TP Pendule PesantDocument9 paginiTP Pendule Pesantjalilpadawou55Încă nu există evaluări
- MPDTRC34Document12 paginiMPDTRC34PFEÎncă nu există evaluări
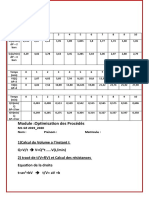
- Module:Optimisation Des ProcédésDocument7 paginiModule:Optimisation Des ProcédéssaliaÎncă nu există evaluări
- TransportDocument7 paginiTransportKibane100% (1)
- Conclusion GéneraleDocument1 paginăConclusion GéneraleKibaneÎncă nu există evaluări
- Saidal Enregistré AutomatiquementDocument17 paginiSaidal Enregistré AutomatiquementKibane100% (1)
- Dimension NementDocument27 paginiDimension NementKibaneÎncă nu există evaluări
- La Pollution Des Eaux UséesDocument14 paginiLa Pollution Des Eaux UséesKibane100% (1)
- TP 3Document4 paginiTP 3Kibane100% (2)
- Ondes Trans PDFDocument4 paginiOndes Trans PDFBilal BouakrifÎncă nu există evaluări
- CH IntDocument20 paginiCH IntKibaneÎncă nu există evaluări
- Cours Chimie Min - RaleDocument61 paginiCours Chimie Min - RaleKibaneÎncă nu există evaluări
- DépannageDocument3 paginiDépannagekakeraÎncă nu există evaluări
- Devoir 2 Modele 2 Si 2 Bac SM B Semestre 2Document17 paginiDevoir 2 Modele 2 Si 2 Bac SM B Semestre 2lemsouguerÎncă nu există evaluări
- Principes & Fluides HydrauliqueDocument21 paginiPrincipes & Fluides HydrauliqueMohamed SabreÎncă nu există evaluări
- Caprari MD DpompeDocument7 paginiCaprari MD DpompeRamziYakoubiÎncă nu există evaluări
- Fagor 1f 3611 ItDocument82 paginiFagor 1f 3611 ItdahliablueÎncă nu există evaluări
- DS 16 17 RTPDocument3 paginiDS 16 17 RTPPFEÎncă nu există evaluări
- Chemmam MDS 2éme GC+TPDocument16 paginiChemmam MDS 2éme GC+TPKévinÎncă nu există evaluări
- Meca EPFLDocument38 paginiMeca EPFLNejib Ghazouani100% (1)
- Travaux Dirigés N°2: Distributeurs Pneumatiques: Exercice 1Document3 paginiTravaux Dirigés N°2: Distributeurs Pneumatiques: Exercice 1Mendil likiaÎncă nu există evaluări
- Kit Cic PDFDocument4 paginiKit Cic PDFPaulo TeixeiraÎncă nu există evaluări
- razafindratsaravahyDavidaN ESPA MAST2 16Document143 paginirazafindratsaravahyDavidaN ESPA MAST2 16Nouhayla HafidiÎncă nu există evaluări
- Chapitre 2. A Jour P32-60Document29 paginiChapitre 2. A Jour P32-60Deakanohv Jean100% (1)
- PM Serie 12 - GA130000 - 11-2008 - IT - EN - FR - DE - ESDocument399 paginiPM Serie 12 - GA130000 - 11-2008 - IT - EN - FR - DE - ESNunoÎncă nu există evaluări
- K53H FraDocument2 paginiK53H FraEli FATSAWOÎncă nu există evaluări
- 1268 Datasheet FRDocument3 pagini1268 Datasheet FRFiras MaitigÎncă nu există evaluări
- FrottementsDocument4 paginiFrottementsMaupetitÎncă nu există evaluări
- Chapitre 2 - Machines SynchronesDocument100 paginiChapitre 2 - Machines SynchronesInsafe Aarab100% (1)
- Méthode de CrémonaDocument16 paginiMéthode de CrémonaRedouane Kouddane100% (4)
- Dalamatic Insertable - 3319-8006C - FR - Rev HDocument28 paginiDalamatic Insertable - 3319-8006C - FR - Rev HbecosmeÎncă nu există evaluări
- Exam MEF M2M 2014 CorrectionDocument9 paginiExam MEF M2M 2014 CorrectionاشراقةاملÎncă nu există evaluări
- Rapport de Stage Ocp SafiDocument36 paginiRapport de Stage Ocp SafiIbtissamOu50% (4)
- Chapitre 5 - Protection, Dimensionnement Et Endtrainement À Vitesse Variable - MTDocument20 paginiChapitre 5 - Protection, Dimensionnement Et Endtrainement À Vitesse Variable - MThamzaÎncă nu există evaluări
- A6LF1 IntroductionDocument62 paginiA6LF1 IntroductionAlvaro Euan94% (33)
- IND UT-113 - Fiche ExplicativeDocument5 paginiIND UT-113 - Fiche ExplicativeSamuel MazetÎncă nu există evaluări
- ch6 CorrectionexercicesDocument5 paginich6 CorrectionexercicesLaFouchetteÎncă nu există evaluări
- TD3 Ilot 120Document8 paginiTD3 Ilot 120Stéphane PIGOTÎncă nu există evaluări
- 2013 MP CCP Physique I-CorrigéDocument10 pagini2013 MP CCP Physique I-CorrigéVince DreÎncă nu există evaluări
- Preventive Maintenance Manual FR FRDocument92 paginiPreventive Maintenance Manual FR FRVladimir NanaÎncă nu există evaluări
- Manuel Instructions mc650 PDFDocument47 paginiManuel Instructions mc650 PDFtoufikÎncă nu există evaluări