S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Ansys Training Book.Document15 paginiAnsys Training Book.Sarath Babu SÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- EMC Design Guide For PCBDocument78 paginiEMC Design Guide For PCBFaruq AhmedÎncă nu există evaluări
- Design of Screw JackDocument39 paginiDesign of Screw Jackshreedharkolekar0% (1)
- Creature Loot PDF - GM BinderDocument97 paginiCreature Loot PDF - GM BinderAlec0% (1)
- Mid Term Business Economy - Ayustina GiustiDocument9 paginiMid Term Business Economy - Ayustina GiustiAyustina Giusti100% (1)
- Astm A182Document2 paginiAstm A182fastenersworldÎncă nu există evaluări
- V Ships Appln FormDocument6 paginiV Ships Appln Formkaushikbasu2010Încă nu există evaluări
- MicrofluidicsDocument198 paginiMicrofluidicsBundit Boonkhao100% (1)
- PACL Lodha Commette Final NOTICE of SALE With Property DetailsDocument4 paginiPACL Lodha Commette Final NOTICE of SALE With Property DetailsVivek Agrawal100% (2)
- Free Vibration Analysis of Laminated Composite BeamsDocument6 paginiFree Vibration Analysis of Laminated Composite BeamsshreedharkolekarÎncă nu există evaluări
- Magnetorheological Fluid and Its ApplicationsDocument6 paginiMagnetorheological Fluid and Its ApplicationsshreedharkolekarÎncă nu există evaluări
- Modal Analysis of A Simply Supported Sandwich BeamDocument4 paginiModal Analysis of A Simply Supported Sandwich BeamesatjournalsÎncă nu există evaluări
- Oden Bach 2016Document11 paginiOden Bach 2016shreedharkolekarÎncă nu există evaluări
- DynamicsDocument31 paginiDynamicsANAND RAJÎncă nu există evaluări
- Thesis WalidDocument119 paginiThesis WalidImthiaz AhmedÎncă nu există evaluări
- DynamicsDocument31 paginiDynamicsANAND RAJÎncă nu există evaluări
- Cama Lab 10mel68 PDFDocument63 paginiCama Lab 10mel68 PDFshreedharkolekar50% (2)
- A Guide To Business PHD ApplicationsDocument24 paginiA Guide To Business PHD ApplicationsSampad AcharyaÎncă nu există evaluări
- Vibration Control Design For A PlateDocument26 paginiVibration Control Design For A PlateshreedharkolekarÎncă nu există evaluări
- Terry Threadgold Cardiff Cultural Studies, Critical Theory and Critical Discourse Analysis Histories, Remembering and FuturesDocument33 paginiTerry Threadgold Cardiff Cultural Studies, Critical Theory and Critical Discourse Analysis Histories, Remembering and FuturesjomonotÎncă nu există evaluări
- Polymer Science SL - No Subject Code Name of The SubjectDocument11 paginiPolymer Science SL - No Subject Code Name of The SubjectshreedharkolekarÎncă nu există evaluări
- Importance of Isolating Controlled Variables in Experimental DesignDocument2 paginiImportance of Isolating Controlled Variables in Experimental DesignshreedharkolekarÎncă nu există evaluări
- Refrigeration and Air ConditioningDocument7 paginiRefrigeration and Air ConditioningshreedharkolekarÎncă nu există evaluări
- When Doing Social ResearchDocument2 paginiWhen Doing Social ResearchshreedharkolekarÎncă nu există evaluări
- When Doing Social ResearchDocument2 paginiWhen Doing Social ResearchshreedharkolekarÎncă nu există evaluări
- Fluid PowerDocument2 paginiFluid PowershreedharkolekarÎncă nu există evaluări
- Imp Website For ThesisDocument1 paginăImp Website For ThesisshreedharkolekarÎncă nu există evaluări
- Fatigue of CompositesDocument32 paginiFatigue of CompositesshreedharkolekarÎncă nu există evaluări
- Tapered threaded part drawing with multiple diametersDocument2 paginiTapered threaded part drawing with multiple diametersshreedharkolekarÎncă nu există evaluări
- 1 s2.0 S1367593106001633 Main PDFDocument8 pagini1 s2.0 S1367593106001633 Main PDFfizikmalaysiaÎncă nu există evaluări
- Refrigeration and Air ConditioningDocument7 paginiRefrigeration and Air ConditioningshreedharkolekarÎncă nu există evaluări
- Art:10.1186/1477 3155 2 2Document5 paginiArt:10.1186/1477 3155 2 2shreedharkolekarÎncă nu există evaluări
- Fluid PowerDocument2 paginiFluid PowershreedharkolekarÎncă nu există evaluări
- ANSYS Sample 2-D Axisymmetric ProblemDocument5 paginiANSYS Sample 2-D Axisymmetric ProblemshreedharkolekarÎncă nu există evaluări
- Fluid PowerDocument2 paginiFluid PowershreedharkolekarÎncă nu există evaluări
- BA50BCODocument6 paginiBA50BCOpedroarlindo-1Încă nu există evaluări
- MT8820C LTE Measurement GuideDocument136 paginiMT8820C LTE Measurement GuideMuthannaÎncă nu există evaluări
- Uhde Painting SpecificationDocument34 paginiUhde Painting Specificationmohamed elmasryÎncă nu există evaluări
- Arsh Final Project ReportDocument65 paginiArsh Final Project Report720 Manvir SinghÎncă nu există evaluări
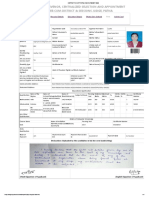
- Certification of Psychology Specialists Application Form: Cover PageDocument3 paginiCertification of Psychology Specialists Application Form: Cover PageJona Mae MetroÎncă nu există evaluări
- Nigerian Romance ScamDocument10 paginiNigerian Romance ScamAnonymous Pb39klJÎncă nu există evaluări
- I. Specifikacija Opreme Sa Ugradnjom R.Br. Opis JM KomDocument4 paginiI. Specifikacija Opreme Sa Ugradnjom R.Br. Opis JM KomAleksandar VidakovicÎncă nu există evaluări
- The Three Key Linkages: Improving The Connections Between Marketing and SalesDocument5 paginiThe Three Key Linkages: Improving The Connections Between Marketing and SalesRuxandra PopaÎncă nu există evaluări
- Documentation Control HandbookDocument9 paginiDocumentation Control Handbookcrainvictor 45Încă nu există evaluări
- Water 07 02314Document36 paginiWater 07 02314Satyajit ShindeÎncă nu există evaluări
- 09 Lift Cylinder Drift (Bulldozer) - CheckDocument2 pagini09 Lift Cylinder Drift (Bulldozer) - CheckFredy Manrique AstoÎncă nu există evaluări
- Awwa c207 Flanges Spec SheetDocument13 paginiAwwa c207 Flanges Spec SheetVincent DiepÎncă nu există evaluări
- Alarm Management Second Ed - Hollifield Habibi - IntroductionDocument6 paginiAlarm Management Second Ed - Hollifield Habibi - IntroductionDavid DuranÎncă nu există evaluări
- Building MassingDocument6 paginiBuilding MassingJohn AmirÎncă nu există evaluări
- Parts of A Computer With Their FunctionsDocument19 paginiParts of A Computer With Their FunctionsJaried SumbaÎncă nu există evaluări
- 2004 Canon Bino BrochureDocument6 pagini2004 Canon Bino BrochureCraig ThompsonÎncă nu există evaluări
- Sheet Metal FormingDocument13 paginiSheet Metal FormingFranklin SilvaÎncă nu există evaluări
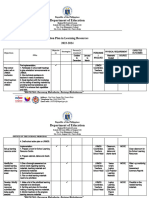
- aCTION PLAN IN HEALTHDocument13 paginiaCTION PLAN IN HEALTHCATHERINE FAJARDOÎncă nu există evaluări
- Raj Priya Civil Court Clerk FinalDocument1 paginăRaj Priya Civil Court Clerk FinalRaj KamalÎncă nu există evaluări
- Dice Resume CV Narendhar ReddyDocument5 paginiDice Resume CV Narendhar ReddyjaniÎncă nu există evaluări
- 457 PDFDocument8 pagini457 PDFAbbey Joy CollanoÎncă nu există evaluări
- Gulfco 1049 MaxDocument5 paginiGulfco 1049 MaxOm Prakash RajÎncă nu există evaluări
- Attribute Achievement FormDocument15 paginiAttribute Achievement FormMiguel MenesesÎncă nu există evaluări
- Doohap supplier and customer segmentationDocument2 paginiDoohap supplier and customer segmentationPriyah RathakrishnahÎncă nu există evaluări