S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Microsystems, Instrument Electronics, and Mobile Sensor PlatformsDocument15 paginiMicrosystems, Instrument Electronics, and Mobile Sensor PlatformsShajahan ShagulÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- List of Deliverables With Manhours - 150T Cargo Cum Passenger Vessel-1Document3 paginiList of Deliverables With Manhours - 150T Cargo Cum Passenger Vessel-1Shajahan ShagulÎncă nu există evaluări
- Virtual Instrumentation Systems-Some Developments in Power Plant Training and EducationDocument4 paginiVirtual Instrumentation Systems-Some Developments in Power Plant Training and EducationShajahan ShagulÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Microsystems, Instrument Electronics, and Mobile Sensor PlatformsDocument8 paginiMicrosystems, Instrument Electronics, and Mobile Sensor PlatformsShajahan ShagulÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Mechanical and Shielding Design of A Portable Spectrometer and Beam Dump Assembly at BNL's Accelerator Test FacilityDocument10 paginiThe Mechanical and Shielding Design of A Portable Spectrometer and Beam Dump Assembly at BNL's Accelerator Test FacilityShajahan ShagulÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Welding Procedure Specification ExampleDocument2 paginiWelding Procedure Specification ExampleShajahan ShagulÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- DELFTship Cargo DemoDocument8 paginiDELFTship Cargo DemoTommyVercettiÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Instrumentation Training Tutorial Part3Document17 paginiInstrumentation Training Tutorial Part3Gary8100% (1)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Inst AssignDocument14 paginiInst AssignShajahan ShagulÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- View - General Arrangement - HTMLDocument1 paginăView - General Arrangement - HTMLShajahan ShagulÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Linear Programming Approach To Shipboard Electrical System ModelingDocument9 paginiA Linear Programming Approach To Shipboard Electrical System ModelingShajahan ShagulÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Flexible Drive Shaft and Brass TubeDocument9 paginiFlexible Drive Shaft and Brass TubeShajahan ShagulÎncă nu există evaluări
- Stopped-Flow Calorimeter For Biochemical Applications: ReagentsDocument6 paginiStopped-Flow Calorimeter For Biochemical Applications: ReagentsShajahan ShagulÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Analysis and Design of Ship StructureDocument76 paginiAnalysis and Design of Ship Structureapi-26548846100% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Drawing A 1 Frames Views MDocument1 paginăDrawing A 1 Frames Views MShajahan ShagulÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- TechGuideonLNGBunkerVesselsBarges 100915Document23 paginiTechGuideonLNGBunkerVesselsBarges 100915Mohamed FouadÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Tender Title: Name of CompanyDocument2 paginiTender Title: Name of CompanyShajahan ShagulÎncă nu există evaluări
- Sloshing Analysis of Single Impact Wave & Irregular Motions in A 2D Tank - Experiments & NumericsDocument1 paginăSloshing Analysis of Single Impact Wave & Irregular Motions in A 2D Tank - Experiments & NumericsShajahan ShagulÎncă nu există evaluări
- Characteristics of Kids Paddle BoatDocument1 paginăCharacteristics of Kids Paddle BoatShajahan ShagulÎncă nu există evaluări
- Artigas FrigateDocument7 paginiArtigas FrigateShajahan ShagulÎncă nu există evaluări
- Drawing A1 Frames 1 To 10 SMDocument1 paginăDrawing A1 Frames 1 To 10 SMShajahan ShagulÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Drawing A 03 View References MDocument1 paginăDrawing A 03 View References MShajahan ShagulÎncă nu există evaluări
- Detail Sheets SMDocument4 paginiDetail Sheets SMShajahan ShagulÎncă nu există evaluări
- Docking, Mooring and Transfer For LNG: Trelleborg Marine Systems - Performance PeopleDocument20 paginiDocking, Mooring and Transfer For LNG: Trelleborg Marine Systems - Performance PeoplealyshahÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Drawing A1 Frames 11 On SMDocument1 paginăDrawing A1 Frames 11 On SMShajahan ShagulÎncă nu există evaluări
- Tug CalculationDocument1 paginăTug CalculationShajahan ShagulÎncă nu există evaluări
- SPEC of Pipes For ShipbuildingDocument13 paginiSPEC of Pipes For ShipbuildingShajahan ShagulÎncă nu există evaluări
- LR, LNG Arctic ShippingDocument26 paginiLR, LNG Arctic ShippingHoucine BahajÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Tug CalculationDocument1 paginăTug CalculationShajahan ShagulÎncă nu există evaluări
- D.recommendeddesign HSITools (EDocFind - Com)Document32 paginiD.recommendeddesign HSITools (EDocFind - Com)Shajahan ShagulÎncă nu există evaluări
- ABS Rules Steel Vessels Hull Construction and EquipmentDocument22 paginiABS Rules Steel Vessels Hull Construction and EquipmentCezar_Cavalcante100% (1)
- Vessel Details: 9449546 565 743000 9VCL3 Oil/Chemical TankerDocument37 paginiVessel Details: 9449546 565 743000 9VCL3 Oil/Chemical TankergenyÎncă nu există evaluări
- Vintage Wood Boat Plans 1950sDocument123 paginiVintage Wood Boat Plans 1950ssjdarkman1930100% (5)
- How To Dimension Sailing CatamaranDocument10 paginiHow To Dimension Sailing CatamaranFiqhy DianÎncă nu există evaluări
- Boat DesignDocument5 paginiBoat Designthrashmetalhead100% (3)
- Designer's ManualDocument35 paginiDesigner's ManualMas Empi (Mas empi)Încă nu există evaluări
- Mariner's DictionaryDocument238 paginiMariner's DictionaryJeveelynvioleta TorreÎncă nu există evaluări
- Naval Terms and PhraseologiesDocument20 paginiNaval Terms and PhraseologiesTALINGDAN, AGNER CHRISTIAN FULGENCIO0% (1)
- Carolina Skiff CatalogDocument37 paginiCarolina Skiff CatalogBigCoach1979Încă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- REP5 Rules For Ships Part E Vol.1 1.1.2023Document275 paginiREP5 Rules For Ships Part E Vol.1 1.1.2023Tordillo ECV56Încă nu există evaluări
- ABS Parametric RollDocument2 paginiABS Parametric RollAdvan Zuidplas100% (1)
- Vessel Details: 9449546 565 743000 9VCL3 Oil/Chemical TankerDocument37 paginiVessel Details: 9449546 565 743000 9VCL3 Oil/Chemical TankerSarath Babu SÎncă nu există evaluări
- Calculation (Midship) of ShipDocument24 paginiCalculation (Midship) of ShipSarath Babu S100% (7)
- List of Softwares-1Document18 paginiList of Softwares-1vijayÎncă nu există evaluări
- INA Problems 2Document6 paginiINA Problems 2siddarth amaravathiÎncă nu există evaluări
- Fore End StructureDocument22 paginiFore End StructureAnnisa Maya Shabrina100% (1)
- Hull InspectionDocument9 paginiHull InspectionTulen CabuldinÎncă nu există evaluări
- Design Hydrostatics Report OriginaalDocument2 paginiDesign Hydrostatics Report OriginaalJaakko-Janel EndÎncă nu există evaluări
- WW2 Ship IdentificationDocument34 paginiWW2 Ship Identificationfinriswolf2100% (5)
- General ArrangementDocument33 paginiGeneral Arrangementapi-27176519100% (16)
- Manual de Instalacion de Motores Marinos CatDocument226 paginiManual de Instalacion de Motores Marinos CatGiancarlo Terrazas Rojas100% (5)
- A Sickle Boat Petroglyph in Wadi Asafir - Possible Evidence of Pre-Dynastic Egyptian Influence On North-West ArabiaDocument6 paginiA Sickle Boat Petroglyph in Wadi Asafir - Possible Evidence of Pre-Dynastic Egyptian Influence On North-West ArabiaMattyÎncă nu există evaluări
- Freeship Manual 2.6Document57 paginiFreeship Manual 2.6Bill GeronikolasÎncă nu există evaluări
- Cc55k 5500 Fazel Spec Rev3aDocument15 paginiCc55k 5500 Fazel Spec Rev3aFirstface LastbookÎncă nu există evaluări
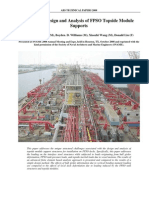
- Structural Design and Analysis of FPSO Topside Module SupportsDocument10 paginiStructural Design and Analysis of FPSO Topside Module Supportscaic351b100% (1)
- Ship Resistance and Propulsion Prof. Dr. P. Krishnankutty Ocean Department Indian Institute of Technology, Madras Lecture - 15 Resistance of Advanced Marine Vehicles - IDocument24 paginiShip Resistance and Propulsion Prof. Dr. P. Krishnankutty Ocean Department Indian Institute of Technology, Madras Lecture - 15 Resistance of Advanced Marine Vehicles - ISaiSudhakar MamidipakaÎncă nu există evaluări
- Ship DesignDocument45 paginiShip DesignRed Ignacio100% (6)
- Nav Cad 2007 Demo GuideDocument21 paginiNav Cad 2007 Demo GuideMohd NyxamÎncă nu există evaluări
- Vol09 Pt01 Issue 01 Submarine StructuresDocument27 paginiVol09 Pt01 Issue 01 Submarine StructuresNguyễn ThaoÎncă nu există evaluări
- Ridgely-Nevitt C.resistance of A High.1967.TRANSDocument28 paginiRidgely-Nevitt C.resistance of A High.1967.TRANSTi AnnelÎncă nu există evaluări
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonDe la EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonEvaluare: 5 din 5 stele5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDe la EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeEvaluare: 4.5 din 5 stele4.5/5 (9)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDe la EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesEvaluare: 5 din 5 stele5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDe la EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosEvaluare: 5 din 5 stele5/5 (1)