S-ar putea să vă placă și
- Converter Fed DC Motors Speed ControlDocument7 paginiConverter Fed DC Motors Speed ControlVempalle RafiÎncă nu există evaluări
- Assignment IDocument4 paginiAssignment Iamith gupta0% (1)
- Part BDocument10 paginiPart BVenkat ManiÎncă nu există evaluări
- Dcd-I HVDCDocument3 paginiDcd-I HVDCsatya_vanapalli3422Încă nu există evaluări
- EE1403 SOLID STATE DRIVES GUIDEDocument14 paginiEE1403 SOLID STATE DRIVES GUIDEsudhanrajanÎncă nu există evaluări
- 4-1 R05 Nov 2011Document99 pagini4-1 R05 Nov 2011ladduÎncă nu există evaluări
- EE1403Document12 paginiEE1403Edward DineshÎncă nu există evaluări
- PSDDocument4 paginiPSDyaswanthÎncă nu există evaluări
- r7410202 Power Semiconductor DrivesDocument4 paginir7410202 Power Semiconductor Drivessriksjntu4508Încă nu există evaluări
- PEDDocument3 paginiPEDSiddharth BanraÎncă nu există evaluări
- Images - EEEQP - RR410202 POWER SEMI CONDUCTOR DRIVESDocument8 paginiImages - EEEQP - RR410202 POWER SEMI CONDUCTOR DRIVESBabasrinivas GuduruÎncă nu există evaluări
- Sheet2 SolutionsDocument32 paginiSheet2 Solutionsmahmoudbadran901Încă nu există evaluări
- Questionbank Unit I&IIDocument4 paginiQuestionbank Unit I&IIkrishnandrk0% (1)
- NR 410202 Power Semiconductor DrivesDocument8 paginiNR 410202 Power Semiconductor DrivesSrinivasa Rao GÎncă nu există evaluări
- ECE 424 - Assign4Document2 paginiECE 424 - Assign4Amos AtandiÎncă nu există evaluări
- Epe 1.3 - Power Electronic Control of DC DrivesDocument1 paginăEpe 1.3 - Power Electronic Control of DC DrivesPhani Kumar MallelaÎncă nu există evaluări
- WWW - Manaresults.Co - In: B.Tech III Year II Semester (R13) Supplementary Examinations December 2016Document2 paginiWWW - Manaresults.Co - In: B.Tech III Year II Semester (R13) Supplementary Examinations December 2016Kunte Vikas RaoÎncă nu există evaluări
- ED Assignment 2Document2 paginiED Assignment 2sushant.sahayee20Încă nu există evaluări
- MachineDocument13 paginiMachineashu0990% (2)
- DC DRIVES CONTROL WITH POWER ELECTRONICSDocument1 paginăDC DRIVES CONTROL WITH POWER ELECTRONICSKornepati SureshÎncă nu există evaluări
- rr410202 Power Semi Conductor DrivesDocument8 paginirr410202 Power Semi Conductor DrivesSrinivasa Rao GÎncă nu există evaluări
- Question Bank-EE2352 - Solid State DrivesDocument4 paginiQuestion Bank-EE2352 - Solid State Drivesdgsgovind100% (1)
- Rr410202 Power Semiconductor DrivesDocument1 paginăRr410202 Power Semiconductor DrivessivabharathamurthyÎncă nu există evaluări
- Question BankDocument5 paginiQuestion BanklalitaerankiÎncă nu există evaluări
- Examen Dr. AliDocument2 paginiExamen Dr. AliLuis Miguel SaldañaÎncă nu există evaluări
- 5284-1-MEEPE 201 Solid State DC and AC Drives - Set1Document2 pagini5284-1-MEEPE 201 Solid State DC and AC Drives - Set1Laxmikant BagaleÎncă nu există evaluări
- Electric Drives Endterm 2014-15Document2 paginiElectric Drives Endterm 2014-15dhirajbharat20Încă nu există evaluări
- Power Semi Conductor Drives Single Phase Half Controlled Bridge ConverterDocument24 paginiPower Semi Conductor Drives Single Phase Half Controlled Bridge Convertermanideep0% (1)
- Electrical Machines - IDocument24 paginiElectrical Machines - IEmil Alturk0% (1)
- Speed control of induction motor using VSIDocument8 paginiSpeed control of induction motor using VSIollata kalanoÎncă nu există evaluări
- Question Bank of PC EE 401Document7 paginiQuestion Bank of PC EE 401Isabella SwanÎncă nu există evaluări
- ELE3114 Tutorial April 2022Document6 paginiELE3114 Tutorial April 2022Sahiil MauriceÎncă nu există evaluări
- r5410202 Power Semiconductor DrivesDocument1 paginăr5410202 Power Semiconductor DrivessivabharathamurthyÎncă nu există evaluări
- Eem507 Electrical Technology: Unit - 1 D.C.MotorDocument7 paginiEem507 Electrical Technology: Unit - 1 D.C.MotorShubham SharmaÎncă nu există evaluări
- Problem SetDocument2 paginiProblem Setkushagra chitkaraÎncă nu există evaluări
- Tutorial_1Document2 paginiTutorial_1anirbansingha345Încă nu există evaluări
- Problems Bank 2Document7 paginiProblems Bank 2rida.hamza.muhammadÎncă nu există evaluări
- Written QuestionsDocument18 paginiWritten QuestionsGokul RajÎncă nu există evaluări
- Edriveassgnsem 7Document3 paginiEdriveassgnsem 7Vaidish SumariaÎncă nu există evaluări
- Important Question Em2Document4 paginiImportant Question Em2Dinesh PeterÎncă nu există evaluări
- Sheet 2Document4 paginiSheet 2geo_biÎncă nu există evaluări
- Ee 1403 Solid State DrivesDocument14 paginiEe 1403 Solid State DrivesPanchi AgrawalÎncă nu există evaluări
- DC Motor Assignment QuestionsDocument6 paginiDC Motor Assignment QuestionsSaurav SomeshÎncă nu există evaluări
- Nr410202 Power Semiconductor Devices Set1Document2 paginiNr410202 Power Semiconductor Devices Set1Srinivasa Rao GÎncă nu există evaluări
- Power Semi Conductor DrivesDocument2 paginiPower Semi Conductor DrivesmanideepÎncă nu există evaluări
- Super 30 EM-1 - QBDocument3 paginiSuper 30 EM-1 - QBmr.kaustubh1362Încă nu există evaluări
- EE664 Prob Set1Document3 paginiEE664 Prob Set1Shubham YadavÎncă nu există evaluări
- Assignment-I FEDDocument2 paginiAssignment-I FEDHarish ChandraÎncă nu există evaluări
- The Open University of Sri Lanka Ecx4238 - Electrical Machines Academic Year - 2010 Assignment # 2Document2 paginiThe Open University of Sri Lanka Ecx4238 - Electrical Machines Academic Year - 2010 Assignment # 2Sanjaya SrinathÎncă nu există evaluări
- Problem Set (Exercises)Document10 paginiProblem Set (Exercises)John A. CenizaÎncă nu există evaluări
- Power Electronics and Electrical Drives Mid-Semester PaperDocument2 paginiPower Electronics and Electrical Drives Mid-Semester PaperU20EE051 DEEPTI BOSE SVNITÎncă nu există evaluări
- DC Machines Exam QuestionsDocument5 paginiDC Machines Exam QuestionsGeethika VarmaÎncă nu există evaluări
- AssignmentDocument2 paginiAssignmenteyu ham studioÎncă nu există evaluări
- Electrical Machines1 PDFDocument178 paginiElectrical Machines1 PDFnivashini a0% (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)De la EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Încă nu există evaluări
- Variable Speed AC Drives with Inverter Output FiltersDe la EverandVariable Speed AC Drives with Inverter Output FiltersÎncă nu există evaluări
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDe la EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetEvaluare: 2 din 5 stele2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDe la EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkÎncă nu există evaluări
- Ohm's Law and Electric CurrentDocument34 paginiOhm's Law and Electric CurrentSaravanan T YÎncă nu există evaluări
- Ee105 5Document32 paginiEe105 5Saravanan T YÎncă nu există evaluări
- Ee105 6Document28 paginiEe105 6Saravanan T YÎncă nu există evaluări
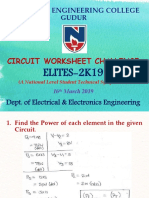
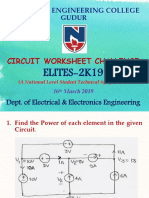
- Circuit WorkSheet Challenge KeyDocument9 paginiCircuit WorkSheet Challenge KeySaravanan T YÎncă nu există evaluări
- Ee105 1Document32 paginiEe105 1Saravanan T YÎncă nu există evaluări
- Introduction to Basic Principles of Electricity and Ohm's LawDocument26 paginiIntroduction to Basic Principles of Electricity and Ohm's LawSaravanan T YÎncă nu există evaluări
- Department of Technical Education Andhra PradeshDocument36 paginiDepartment of Technical Education Andhra PradeshSaravanan T YÎncă nu există evaluări
- Circuit WorkSheet Challenge KeyDocument9 paginiCircuit WorkSheet Challenge KeySaravanan T YÎncă nu există evaluări
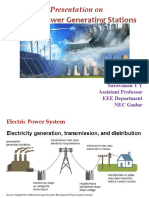
- Electric Power Systems: An OverviewDocument29 paginiElectric Power Systems: An OverviewSaravanan T YÎncă nu există evaluări
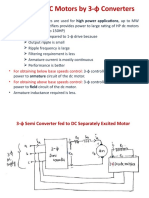
- Control of DC Motors by 3-φ ConvertersDocument16 paginiControl of DC Motors by 3-φ ConvertersSaravanan T YÎncă nu există evaluări
- Speed Control of Synchronous MotorsDocument12 paginiSpeed Control of Synchronous MotorsSaravanan T YÎncă nu există evaluări
- Control of DC Motors by 1-φ ConvertersDocument6 paginiControl of DC Motors by 1-φ ConvertersSaravanan T YÎncă nu există evaluări
- Induction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurDocument18 paginiInduction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurSaravanan T YÎncă nu există evaluări
- Circuit WorkSheet ChallengeDocument9 paginiCircuit WorkSheet ChallengeSaravanan T YÎncă nu există evaluări
- Control of Induction MotorsDocument80 paginiControl of Induction MotorsSaravanan T YÎncă nu există evaluări
- DC Machines: Faraday's Laws and ConstructionDocument34 paginiDC Machines: Faraday's Laws and ConstructionSaravanan T YÎncă nu există evaluări
- 3 ExperimentsDocument100 pagini3 ExperimentsSaravanan T YÎncă nu există evaluări
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGDocument6 paginiNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGSaravanan T YÎncă nu există evaluări
- Unit-1 - DC & AC Circuits PDFDocument60 paginiUnit-1 - DC & AC Circuits PDFSaravanan T Y100% (5)
- UNIT - 2 - DC & AC MachinesDocument17 paginiUNIT - 2 - DC & AC MachinesSaravanan T YÎncă nu există evaluări
- TimersDocument51 paginiTimersSaravanan T YÎncă nu există evaluări
- Ii. Iii I: AcademicDocument1 paginăIi. Iii I: AcademicSaravanan T YÎncă nu există evaluări
- Electrical Machine 1Document10 paginiElectrical Machine 1Irfan NaqviÎncă nu există evaluări
- 4 - Control of Induction MotorDocument23 pagini4 - Control of Induction MotorSaravanan T YÎncă nu există evaluări
- UNIT - 2 - DC & AC MachinesDocument17 paginiUNIT - 2 - DC & AC MachinesSaravanan T YÎncă nu există evaluări
- 3 ExperimentsDocument100 pagini3 ExperimentsSaravanan T YÎncă nu există evaluări
- Arm7 Scrib1Document72 paginiArm7 Scrib1Saravanan T YÎncă nu există evaluări
- Synchronous Generators NotesDocument75 paginiSynchronous Generators NotesSaravanan T Y100% (1)
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Document9 paginiNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Saravanan T YÎncă nu există evaluări
- Systems Analysis and Design 8th Edition Kendall Solutions ManualDocument25 paginiSystems Analysis and Design 8th Edition Kendall Solutions Manualbdelliumdimehqa100% (15)
- How to correctly fill out an OMR answer sheetDocument6 paginiHow to correctly fill out an OMR answer sheetAtmÎncă nu există evaluări
- Waterproofing Redefined: 40+ Years of ExperienceDocument14 paginiWaterproofing Redefined: 40+ Years of Experiencenguyen hoang AnhÎncă nu există evaluări
- GCP Fund Module 8 Big Data and Machine Learning in The Cloud CourseraDocument38 paginiGCP Fund Module 8 Big Data and Machine Learning in The Cloud CourseraAvinash R GowdaÎncă nu există evaluări
- Project Budget WBSDocument4 paginiProject Budget WBSvaraduÎncă nu există evaluări
- Canon G3060Document10 paginiCanon G3060Arun NaikwadeÎncă nu există evaluări
- Computador de Bordo - Autool-X50-Plus-Car-Obd-Hud-Smart-Digital-Meter-User-ManualDocument13 paginiComputador de Bordo - Autool-X50-Plus-Car-Obd-Hud-Smart-Digital-Meter-User-ManualIvanorTrentinÎncă nu există evaluări
- Detailed Lesson Plan - Computer System ServicingDocument4 paginiDetailed Lesson Plan - Computer System ServicingRica Jeslie Garcia100% (1)
- IFS IoT Business ConnectorDocument12 paginiIFS IoT Business ConnectorvenkatÎncă nu există evaluări
- 4017rs 3614rsDocument662 pagini4017rs 3614rsSebastian GeraciÎncă nu există evaluări
- Exam Actual 04Document8 paginiExam Actual 04Kedamawi RecordsÎncă nu există evaluări
- Lomerio, Jasmin M. BSME-3B - Final One Course RequirementDocument6 paginiLomerio, Jasmin M. BSME-3B - Final One Course RequirementPrincess NobleÎncă nu există evaluări
- How To Make Bluetooth Controlled Car Using Arduino UNO R3Document8 paginiHow To Make Bluetooth Controlled Car Using Arduino UNO R3Keshav RavanaÎncă nu există evaluări
- Electrical Wiring InstallationDocument11 paginiElectrical Wiring InstallationDurrahKhazalle100% (26)
- Magazine Vs School Paper-ActivityDocument2 paginiMagazine Vs School Paper-ActivityArra MinnaÎncă nu există evaluări
- Morales BSIT2 1AA PlatTech 04TaskPerformance1Document2 paginiMorales BSIT2 1AA PlatTech 04TaskPerformance1Hazzel GilveroÎncă nu există evaluări
- Colonel J. Garnier - The Worship of The DeadDocument484 paginiColonel J. Garnier - The Worship of The DeadHorne13100% (1)
- Dap 1160Document4 paginiDap 1160Marco RossiÎncă nu există evaluări
- Robot ExcavatorDocument9 paginiRobot ExcavatorHua Hidari YangÎncă nu există evaluări
- Evidencia Elaboracion de Un FolletoDocument2 paginiEvidencia Elaboracion de Un FolletoYessica Gonzalez RamirezÎncă nu există evaluări
- Icom IC-M504 Instruction ManualDocument80 paginiIcom IC-M504 Instruction ManualYayok S. AnggoroÎncă nu există evaluări
- (26 Inch) 95xx Kimark SmartFlare Manual, Single Stage (95.13)Document29 pagini(26 Inch) 95xx Kimark SmartFlare Manual, Single Stage (95.13)diego tobarÎncă nu există evaluări
- Chapter 1 Introduction To The Semiconductor Industry 2005 VLSI TECH.1Document28 paginiChapter 1 Introduction To The Semiconductor Industry 2005 VLSI TECH.1samactrangÎncă nu există evaluări
- MCT Program Guide 2011Document7 paginiMCT Program Guide 2011Vikram SinghÎncă nu există evaluări
- Telenor Satellite Phone BrochureDocument8 paginiTelenor Satellite Phone BrochureTim KenneyÎncă nu există evaluări
- NIT Sikkim Organisational Structures ExplainedDocument6 paginiNIT Sikkim Organisational Structures ExplainedDhiraj SharmaÎncă nu există evaluări
- Replacing Concrete Pipes with FRP in Marafiq's CanalsDocument19 paginiReplacing Concrete Pipes with FRP in Marafiq's CanalsDanish HamidÎncă nu există evaluări
- Web20ERC - Evaluation Paper Final V1Document7 paginiWeb20ERC - Evaluation Paper Final V1Omar Vicente Garcia SanchezÎncă nu există evaluări
- MG6088 Software Project Management SyllabusDocument1 paginăMG6088 Software Project Management SyllabusPon VasanÎncă nu există evaluări
- Apartment Maintenance Accounts Excel TemplateDocument27 paginiApartment Maintenance Accounts Excel TemplateBrown EmmanuelÎncă nu există evaluări