S-ar putea să vă placă și
- Flight Stability and Control and Performance Results From The Linear Aerospike SR-71 Experiment (Lasre)Document30 paginiFlight Stability and Control and Performance Results From The Linear Aerospike SR-71 Experiment (Lasre)Kleon TriantafillidisÎncă nu există evaluări
- GPSD - Gitlab.io NMEA RevealedDocument37 paginiGPSD - Gitlab.io NMEA RevealedFerdy Fer DÎncă nu există evaluări
- In Flight Guide CJ3 Edition 5Document39 paginiIn Flight Guide CJ3 Edition 5AmandoÎncă nu există evaluări
- ACU - Seatel DAC-2202 - Serial ProtocolDocument11 paginiACU - Seatel DAC-2202 - Serial ProtocolGuillermo Miravalles100% (1)
- Standard NMEA-0183 Sentences DescriptionDocument6 paginiStandard NMEA-0183 Sentences DescriptionNSR.M TECHNOLOGIES LTDÎncă nu există evaluări
- Radio NavigationDocument25 paginiRadio Navigationpappu khan100% (1)
- SAR Signal ProcessingDocument84 paginiSAR Signal ProcessingDoha AbbasÎncă nu există evaluări
- nav 04 - pilot card - копияDocument4 pagininav 04 - pilot card - копияКонстантин КулаковÎncă nu există evaluări
- NmeaDocument25 paginiNmeaflorin catalin brutaruÎncă nu există evaluări
- Application of Optimization Technique For Compensator Design ofDocument8 paginiApplication of Optimization Technique For Compensator Design ofGayathri GnanaiyaÎncă nu există evaluări
- Folleto SC-50Document4 paginiFolleto SC-50Juan VillanuevaÎncă nu există evaluări
- Yeo StructuralLoads AHS 2014 PDFDocument26 paginiYeo StructuralLoads AHS 2014 PDFKarad KaradiasÎncă nu există evaluări
- Propagation Model TuningDocument59 paginiPropagation Model TuningdongarsinghÎncă nu există evaluări
- Era ADS-B System Operation Training: Richard XieDocument29 paginiEra ADS-B System Operation Training: Richard Xiemuhammad arif sulaimanÎncă nu există evaluări
- Nav 02e - Ecdis Passage Plan (Berth To Berth)Document6 paginiNav 02e - Ecdis Passage Plan (Berth To Berth)nikita danilov100% (1)
- Wide-Area (Wavelength-Routed) Optical Networks - 1. Virtual Topology Design 2. Wavelength Conversion 3. Control and ManagementDocument27 paginiWide-Area (Wavelength-Routed) Optical Networks - 1. Virtual Topology Design 2. Wavelength Conversion 3. Control and ManagementunderthecoverÎncă nu există evaluări
- Geometry CalculateDocument14 paginiGeometry CalculateTran Minh DungÎncă nu există evaluări
- TDD HarqDocument24 paginiTDD HarqVimal Pratap SinghÎncă nu există evaluări
- Call Data Flow Diagram V2Document64 paginiCall Data Flow Diagram V2Salah BerkaneÎncă nu există evaluări
- NMEA0183 SentencesDocument29 paginiNMEA0183 Sentenceskukuriku13Încă nu există evaluări
- Summary of Umts Kpi's TroubleshootingDocument16 paginiSummary of Umts Kpi's TroubleshootingVicky SehrawatÎncă nu există evaluări
- SupAero Sujet BE Navigation S42013Document7 paginiSupAero Sujet BE Navigation S42013Al Anood Al AmeriÎncă nu există evaluări
- E4ComEngrABC PDFDocument69 paginiE4ComEngrABC PDFBudi SantosoÎncă nu există evaluări
- Delivery SheetDocument3 paginiDelivery SheetyasirmehboobÎncă nu există evaluări
- Satellite CommunicationsDocument57 paginiSatellite Communicationsheritage336Încă nu există evaluări
- ABQSOPDocument16 paginiABQSOPPaolo Stark LupardiÎncă nu există evaluări
- Inflight Guide CJ2+-V2.0Document30 paginiInflight Guide CJ2+-V2.0Tony NicholasÎncă nu există evaluări
- Q-SeabedSeismicAcquisitionQC 4113924 01Document4 paginiQ-SeabedSeismicAcquisitionQC 4113924 01Raden TunaÎncă nu există evaluări
- Apn 242Document5 paginiApn 242The Angry ManÎncă nu există evaluări
- Ils Concept PDFDocument166 paginiIls Concept PDFRAMESH RAGHU100% (1)
- Fold HereDocument1 paginăFold HereNaguibÎncă nu există evaluări
- 747 FB 13-02Document2 pagini747 FB 13-02JOEL VITOR PEREIRA DOS SANTOSÎncă nu există evaluări
- Horizontal Control Networks ةيقفلا ا) طبرل ا (مكحتل ا تاكب شDocument14 paginiHorizontal Control Networks ةيقفلا ا) طبرل ا (مكحتل ا تاكب شSoma EmkÎncă nu există evaluări
- ECDIS Glossary of TermsDocument12 paginiECDIS Glossary of TermsAdy CretuÎncă nu există evaluări
- Wcdma Kpi Troubleshooting - RetainabilityDocument32 paginiWcdma Kpi Troubleshooting - RetainabilityNadira Chikh67% (3)
- ADS-B Technology Basics: Greg DunstoneDocument33 paginiADS-B Technology Basics: Greg DunstoneBMPÎncă nu există evaluări
- Earth Station CoordinationDocument33 paginiEarth Station Coordinationmcwong4mcwong22Încă nu există evaluări
- Nav04 - Pilot Card: The Officer Completing The Checklist MUST Enter His Initials As ConfirmationDocument4 paginiNav04 - Pilot Card: The Officer Completing The Checklist MUST Enter His Initials As ConfirmationКонстантин КулаковÎncă nu există evaluări
- Staad OffshoreDocument64 paginiStaad OffshoreAtul Kumar Engineer100% (6)
- Atpl Formula MergedDocument74 paginiAtpl Formula Mergeddsw78jm2mxÎncă nu există evaluări
- Distance Protection: Attia El-FerganyDocument55 paginiDistance Protection: Attia El-FerganyAhmed Ali HosnyÎncă nu există evaluări
- DLTM Coordinate SystemDocument12 paginiDLTM Coordinate SystemddratkovicÎncă nu există evaluări
- SummaryDocument35 paginiSummaryM.H.Hoiting100% (1)
- Huawei - Drive Test TrainingDocument53 paginiHuawei - Drive Test TrainingIwan Arinta100% (9)
- 7745 - Alarm TRX Channel Failure Rate Above Defined ThresholdDocument20 pagini7745 - Alarm TRX Channel Failure Rate Above Defined ThresholdFranklin Manolo NiveloÎncă nu există evaluări
- 033 FLIGHT PLANNING&MONITORING SampleDocument4 pagini033 FLIGHT PLANNING&MONITORING SampleRoman KovalenkoÎncă nu există evaluări
- Ground Stations SrinathDocument7 paginiGround Stations SrinathNeeraj ShahÎncă nu există evaluări
- Inflight Guide CJ4-V2.0Document30 paginiInflight Guide CJ4-V2.0Phil Marsh100% (3)
- 3 Manual Radar PlottingDocument25 pagini3 Manual Radar Plottingosama100% (1)
- Call Flow CSDocument17 paginiCall Flow CSAbdul Majeed KhanÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Measurement While Drilling: Signal Analysis, Optimization and DesignDe la EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignÎncă nu există evaluări
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964De la EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryÎncă nu există evaluări
- 110 Waveform Generator Projects for the Home ConstructorDe la Everand110 Waveform Generator Projects for the Home ConstructorEvaluare: 4 din 5 stele4/5 (1)
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsDe la EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsÎncă nu există evaluări
- Handbook+for+Participants+ +GCC+TeenDocument59 paginiHandbook+for+Participants+ +GCC+Teenchloe.2021164Încă nu există evaluări
- The Practice Book - Doing Passivation ProcessDocument22 paginiThe Practice Book - Doing Passivation ProcessNikos VrettakosÎncă nu există evaluări
- Each Life Raft Must Contain A Few ItemsDocument2 paginiEach Life Raft Must Contain A Few ItemsMar SundayÎncă nu există evaluări
- Electronics 12 00811Document11 paginiElectronics 12 00811Amber MishraÎncă nu există evaluări
- Column Buckling TestDocument8 paginiColumn Buckling TestWiy GuomÎncă nu există evaluări
- Power-Miser 12 Water Heater ManualDocument32 paginiPower-Miser 12 Water Heater ManualClaudeVanDammÎncă nu există evaluări
- Spelling Grammar Punctuation: Teacher BookDocument8 paginiSpelling Grammar Punctuation: Teacher BookNeil MenezesÎncă nu există evaluări
- Company Profile PT. Geo Sriwijaya NusantaraDocument10 paginiCompany Profile PT. Geo Sriwijaya NusantaraHazred Umar FathanÎncă nu există evaluări
- Torrent - WSCC - Windows System Control Center 7.0.5.7 Commercial (x64 x86) - TeamOS - Team OS - Your Only Destination To Custom OS !!Document5 paginiTorrent - WSCC - Windows System Control Center 7.0.5.7 Commercial (x64 x86) - TeamOS - Team OS - Your Only Destination To Custom OS !!moustafaÎncă nu există evaluări
- RV900S - IB - Series 3Document28 paginiRV900S - IB - Series 3GA LewisÎncă nu există evaluări
- Course Outline Principles of MarketingDocument3 paginiCourse Outline Principles of MarketingKhate Tria De LeonÎncă nu există evaluări
- Introduction To SCRDocument19 paginiIntroduction To SCRAlbin RobinÎncă nu există evaluări
- STFC-2023 International E - conference-BITDocument6 paginiSTFC-2023 International E - conference-BITRanilprabhu MÎncă nu există evaluări
- DSynchronize (ENG)Document3 paginiDSynchronize (ENG)Rekha Rajarajan100% (1)
- Introduction To The Iceberg ModelDocument5 paginiIntroduction To The Iceberg ModelAbhay Tiwari100% (1)
- A12 CanSat Technlology Forclimate Monitoring PDFDocument10 paginiA12 CanSat Technlology Forclimate Monitoring PDFDany PABON VILLAMIZARÎncă nu există evaluări
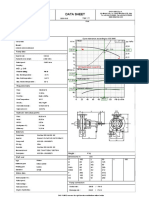
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Document3 paginiData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaÎncă nu există evaluări
- U2 LO An Invitation To A Job Interview Reading - Pre-Intermediate A2 British CounciDocument6 paginiU2 LO An Invitation To A Job Interview Reading - Pre-Intermediate A2 British CounciELVIN MANUEL CONDOR CERVANTESÎncă nu există evaluări
- Advanced Work Packaging: A Fit For Purpose ApproachDocument17 paginiAdvanced Work Packaging: A Fit For Purpose Approachhafidz bandungÎncă nu există evaluări
- 1974 - Roncaglia - The Reduction of Complex LabourDocument12 pagini1974 - Roncaglia - The Reduction of Complex LabourRichardÎncă nu există evaluări
- Sap EwmDocument2 paginiSap EwmsirivirishiÎncă nu există evaluări
- Feasibility and Optimization of Dissimilar Laser Welding ComponentsDocument366 paginiFeasibility and Optimization of Dissimilar Laser Welding Componentskaliappan45490Încă nu există evaluări
- USB-to - Serial RS-232 Hub USB-to - Serial RS-422/485 Hub: UC2322/UC2324/UC4852/UC4854Document1 paginăUSB-to - Serial RS-232 Hub USB-to - Serial RS-422/485 Hub: UC2322/UC2324/UC4852/UC4854sitrakiniavoÎncă nu există evaluări
- Motive 27Tmx: Data SheetDocument2 paginiMotive 27Tmx: Data SheetUlisesGómezÎncă nu există evaluări
- 13 SK Kader Pendamping PGSDocument61 pagini13 SK Kader Pendamping PGSrachman ramadhanaÎncă nu există evaluări
- DC Motor: F Bli NewtonDocument35 paginiDC Motor: F Bli NewtonMuhammad TausiqueÎncă nu există evaluări
- Video Tutorial: Machine Learning 17CS73Document27 paginiVideo Tutorial: Machine Learning 17CS73Mohammed Danish100% (2)
- SL 4001Document2 paginiSL 4001ardiÎncă nu există evaluări
- Methods of Estimation For Building WorksDocument22 paginiMethods of Estimation For Building Worksvara prasadÎncă nu există evaluări
- BS7430 Earthing CalculationDocument14 paginiBS7430 Earthing CalculationgyanÎncă nu există evaluări