S-ar putea să vă placă și
- Magnetic Field WorksheetDocument6 paginiMagnetic Field WorksheetSer Louis Fetilo Fabunan100% (1)
- Lect 6 Distribution Substation Design PDFDocument31 paginiLect 6 Distribution Substation Design PDFMohammed Shariq AyjazÎncă nu există evaluări
- Lect 6 Distribution Substation DesignDocument31 paginiLect 6 Distribution Substation DesignMohammad Haseeb Butt0% (1)
- (Clarinet - Institute) Lefevre SonateDocument10 pagini(Clarinet - Institute) Lefevre SonateAlexÎncă nu există evaluări
- v2 Led LCD Screen Panel Repair MIRKODocument213 paginiv2 Led LCD Screen Panel Repair MIRKOErRobert Ch96% (25)
- Planos Router CNC-1Document112 paginiPlanos Router CNC-1Rey TiburonÎncă nu există evaluări
- Steel Forgings Design Production Selection Testing and ApplicationDocument143 paginiSteel Forgings Design Production Selection Testing and ApplicationVivi Gourioti100% (4)
- Lecture 27 For Paper SavingDocument7 paginiLecture 27 For Paper Savingعبد المهيمن احمد قصيÎncă nu există evaluări
- Kunci KSN-K Biologi Sma 2020Document1 paginăKunci KSN-K Biologi Sma 2020Mira WatiÎncă nu există evaluări
- Kunci OSK Biologi 2019 - Rukim - IdDocument1 paginăKunci OSK Biologi 2019 - Rukim - IdIqbal MudawaliÎncă nu există evaluări
- Dave Wilson: 2012 Texas Instruments Motor Control TrainingDocument25 paginiDave Wilson: 2012 Texas Instruments Motor Control TrainingMilen KolevÎncă nu există evaluări
- Dave Wilson: 2012 Texas Instruments Motor Control TrainingDocument25 paginiDave Wilson: 2012 Texas Instruments Motor Control TrainingDongchoon GimÎncă nu există evaluări
- 5.kunci BiologiDocument1 pagină5.kunci BiologiHabiburrohmanÎncă nu există evaluări
- Kunci KSN-K Biologi Sma 2020 Tomatalikuang - Com-1Document1 paginăKunci KSN-K Biologi Sma 2020 Tomatalikuang - Com-1Rahmawati MasriÎncă nu există evaluări
- 5.kunci BiologiDocument1 pagină5.kunci BiologiAndreÎncă nu există evaluări
- Kunci KSN-K Biologi Sma 2020Document1 paginăKunci KSN-K Biologi Sma 2020Beauty SunflowerÎncă nu există evaluări
- Kunci KSN-K Biologi Sma 2020Document1 paginăKunci KSN-K Biologi Sma 2020Arintia HandayaniÎncă nu există evaluări
- Kunci KSN-K Biologi Sma 2020Document1 paginăKunci KSN-K Biologi Sma 2020Febby KamilaÎncă nu există evaluări
- KSN-K Biologi 2020 KunciDocument1 paginăKSN-K Biologi 2020 KunciAndi aisyah MamalaÎncă nu există evaluări
- KSN-K Biologi 2020 KunciDocument1 paginăKSN-K Biologi 2020 KunciAndi aisyah MamalaÎncă nu există evaluări
- A A A A B B B C C C A A A A B B B C C C A A A A B B B C C C A A A A B B B C C C A A A A B B B C C C A A A A B B B C C C A A A A B B B C C CDocument7 paginiA A A A B B B C C C A A A A B B B C C C A A A A B B B C C C A A A A B B B C C C A A A A B B B C C C A A A A B B B C C C A A A A B B B C C CsamuthrarajaÎncă nu există evaluări
- Pseudo Incircles - Stanley RabinowitzDocument9 paginiPseudo Incircles - Stanley RabinowitzAltananyÎncă nu există evaluări
- LAYOUT PADUS LEGGIERO (Lilin, Can Can, Can't Help)Document7 paginiLAYOUT PADUS LEGGIERO (Lilin, Can Can, Can't Help)Karen LarismaÎncă nu există evaluări
- Kunci BiologiDocument1 paginăKunci BiologiTya DwisaputriÎncă nu există evaluări
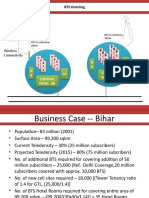
- BTS HotelingDocument4 paginiBTS HotelingmicroqualÎncă nu există evaluări
- Magnetic Field WorksheetDocument6 paginiMagnetic Field WorksheetmayaÎncă nu există evaluări
- Motivos para ViverDocument2 paginiMotivos para ViverAlunos MúsicaÎncă nu există evaluări
- Electricity WorksheetDocument28 paginiElectricity WorksheetNethin RPÎncă nu există evaluări
- Lecture 1Document36 paginiLecture 1Sameer KhanÎncă nu există evaluări
- Corpuz BLDGTC44 ElectricalDocument7 paginiCorpuz BLDGTC44 ElectricalMeljhon CorpuzÎncă nu există evaluări
- Fantasia IV: Cantus/Altus Eingerichtet Für Alt-Und Tenor-SaxophonDocument2 paginiFantasia IV: Cantus/Altus Eingerichtet Für Alt-Und Tenor-Saxophonpippo9318100% (1)
- AC Machines FundamentalsDocument11 paginiAC Machines FundamentalsHector VergaraÎncă nu există evaluări
- Nature and Propagation of Li"ghtDocument5 paginiNature and Propagation of Li"ghtIkshya kcÎncă nu există evaluări
- Turning Effect of A Current-Carrying Coil in A Magnetic FieldDocument0 paginiTurning Effect of A Current-Carrying Coil in A Magnetic FieldRizal SalasiahÎncă nu există evaluări
- Malayalam Study MaterialDocument8 paginiMalayalam Study MaterialFareed Aslam100% (1)
- AC Machines FundamentalsDocument11 paginiAC Machines Fundamentalsjayson juecoÎncă nu există evaluări
- Magnetism WorksheetDocument6 paginiMagnetism Worksheetchristina teoÎncă nu există evaluări
- BJT Gummel Poon ModelDocument11 paginiBJT Gummel Poon Modelsmar.marshalÎncă nu există evaluări
- Magnet 4 DocDocument4 paginiMagnet 4 DocMIS NURUL IMAN JakbarÎncă nu există evaluări
- Beeth EyeglassDocument1 paginăBeeth Eyeglasswawan hermawanÎncă nu există evaluări
- EMI - 1819 - Final - Ans - Corrected PDFDocument10 paginiEMI - 1819 - Final - Ans - Corrected PDFvishwanath c kÎncă nu există evaluări
- Tugas Matematika DiskritDocument1 paginăTugas Matematika DiskritIrma TanÎncă nu există evaluări
- Tugas Matematika DiskritDocument1 paginăTugas Matematika DiskritIrma TanÎncă nu există evaluări
- (Cello Piano) Breval - Concertino (Partes de Piano Y Cello)Document6 pagini(Cello Piano) Breval - Concertino (Partes de Piano Y Cello)carolandrisÎncă nu există evaluări
- Five Phase Switched Reluctance Motor With Short Flux Path For Low Speed Applications and MechatronicsDocument7 paginiFive Phase Switched Reluctance Motor With Short Flux Path For Low Speed Applications and MechatronicsNithya PalanivelÎncă nu există evaluări
- Lesson 3 Power Bipolar Junction Transistor (BJT)Document45 paginiLesson 3 Power Bipolar Junction Transistor (BJT)Chacko MathewÎncă nu există evaluări
- L-3 (DK) (Pe) ( (Ee) Nptel) 1Document5 paginiL-3 (DK) (Pe) ( (Ee) Nptel) 1GagneÎncă nu există evaluări
- WallDocument5 paginiWallsamuthrarajaÎncă nu există evaluări
- Revision Exercise On Ch. 20 Magnetism - 20 May 2019Document26 paginiRevision Exercise On Ch. 20 Magnetism - 20 May 2019IdkÎncă nu există evaluări
- Percep Jun 2017Document9 paginiPercep Jun 2017TxoneÎncă nu există evaluări
- A.C Generator D.C GeneratorDocument16 paginiA.C Generator D.C GeneratorPrashant VanjariÎncă nu există evaluări
- Complete Handout GRP 6Document16 paginiComplete Handout GRP 6glenn maltoÎncă nu există evaluări
- Questions Identify Each of These Logic Gates by Name, and Complete Their Respective Truth TablesDocument5 paginiQuestions Identify Each of These Logic Gates by Name, and Complete Their Respective Truth TablesMario BlanchardÎncă nu există evaluări
- Class 8 Science WorksheetDocument4 paginiClass 8 Science WorksheetTaha ImranÎncă nu există evaluări
- TrussDocument9 paginiTrussHalef Michel Bou KarimÎncă nu există evaluări
- Https /WWW - kccsasr.com/StudentFeeModule/ReqFeePay - AspxDocument1 paginăHttps /WWW - kccsasr.com/StudentFeeModule/ReqFeePay - AspxSimrat SachdevaÎncă nu există evaluări
- Haendel Ombra Mai FuDocument2 paginiHaendel Ombra Mai FuVeronica VeronicaÎncă nu există evaluări
- Castillon's Problem: Inscribe A Triangle in A Given Circle, The Sides of Which Pass Through Three Given PointsDocument4 paginiCastillon's Problem: Inscribe A Triangle in A Given Circle, The Sides of Which Pass Through Three Given PointsIvan Trullàs TuguesÎncă nu există evaluări
- Advances in Quantum Electronics: Volume 3De la EverandAdvances in Quantum Electronics: Volume 3D. W. GoodwinÎncă nu există evaluări
- Amplifier Clase DDocument12 paginiAmplifier Clase DRey TiburonÎncă nu există evaluări
- Panasonic SA-AK750GCPDocument106 paginiPanasonic SA-AK750GCPvasilemil100% (1)
- 10W Per Channel Stereo AmplifierDocument6 pagini10W Per Channel Stereo AmplifierRey TiburonÎncă nu există evaluări
- Transformer Less Power Supplies Resistive and CapacitiveDocument14 paginiTransformer Less Power Supplies Resistive and Capacitivechatmar-thailand-3038Încă nu există evaluări
- 555 Datasheet Revb1 PDFDocument8 pagini555 Datasheet Revb1 PDFRey TiburonÎncă nu există evaluări
- Coil TestDocument1 paginăCoil TestIwan BerlianÎncă nu există evaluări
- MOSFET TutorialDocument39 paginiMOSFET Tutorialnoor_dcetÎncă nu există evaluări
- Make It Right: Micro + MACRO MIR Floating HouseDocument2 paginiMake It Right: Micro + MACRO MIR Floating HousePimpinela GrooveÎncă nu există evaluări
- ELECTRONIC PROJECTS FOR MUSICIANS by Craig Anderton PDFDocument219 paginiELECTRONIC PROJECTS FOR MUSICIANS by Craig Anderton PDFRey TiburonÎncă nu există evaluări
- Arduinobasedintelligentgreenhouse 140523094327 Phpapp02Document51 paginiArduinobasedintelligentgreenhouse 140523094327 Phpapp02Rey TiburonÎncă nu există evaluări
- Presentationonehvtransmissionlines 141216031423 Conversion Gate01 PDFDocument151 paginiPresentationonehvtransmissionlines 141216031423 Conversion Gate01 PDFRey TiburonÎncă nu există evaluări
- Proyectos Divertidos para Estudiantes de ElectronicaDocument191 paginiProyectos Divertidos para Estudiantes de Electronica2006electro3392Încă nu există evaluări
- Artificial Intelligence VOLUME II (AI Course Book 2)Document352 paginiArtificial Intelligence VOLUME II (AI Course Book 2)Rey TiburonÎncă nu există evaluări
- Telwin Tecnica 144-164 Welding-Inverter SMDocument21 paginiTelwin Tecnica 144-164 Welding-Inverter SMAndreea TudoseÎncă nu există evaluări
- Basic Electronic ComponentsDocument28 paginiBasic Electronic ComponentsJafar ShaikhÎncă nu există evaluări
- ADocument842 paginiARey TiburonÎncă nu există evaluări
- HANDBOOK FOR DIGITAL PROJECTS:A Management Toolfor Preservation AndaccessDocument182 paginiHANDBOOK FOR DIGITAL PROJECTS:A Management Toolfor Preservation AndaccessDalia GuerreiroÎncă nu există evaluări
- Ai ML Demystified Mwux2017 Final 171016011705Document66 paginiAi ML Demystified Mwux2017 Final 171016011705maroro11Încă nu există evaluări
- Easy Stereo Amplifier Circuit IC TDA 2003Document1 paginăEasy Stereo Amplifier Circuit IC TDA 2003Rey TiburonÎncă nu există evaluări
- Maheshpicarmavr 130912012611 Phpapp01Document113 paginiMaheshpicarmavr 130912012611 Phpapp01Rey TiburonÎncă nu există evaluări
- Maquina CNC Con Todas Sus MedidasDocument54 paginiMaquina CNC Con Todas Sus MedidasUlisses FabianoÎncă nu există evaluări
- Coil Less AM Receiver PDFDocument1 paginăCoil Less AM Receiver PDFRey TiburonÎncă nu există evaluări
- Project 80sinclairDocument32 paginiProject 80sinclairRey TiburonÎncă nu există evaluări
- Wirelessrfmoduleabhi 120911035259 Phpapp01Document43 paginiWirelessrfmoduleabhi 120911035259 Phpapp01Rey TiburonÎncă nu există evaluări
- MicroSolutions January February 2018Document22 paginiMicroSolutions January February 2018Rey Tiburon100% (1)
- Beck ZapperDocument6 paginiBeck ZapperAR RmsÎncă nu există evaluări
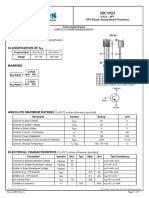
- 2SC1923Document1 pagină2SC1923Rey TiburonÎncă nu există evaluări
- IEEE Grounding TransformersDocument45 paginiIEEE Grounding TransformersMaribel BenitesÎncă nu există evaluări
- Sivarajan Commission On Solar Scam V3Document202 paginiSivarajan Commission On Solar Scam V3PGurusÎncă nu există evaluări
- GEA18657 Wind 2.75 Brochure r11Document8 paginiGEA18657 Wind 2.75 Brochure r11AnaApcarianÎncă nu există evaluări
- Shomajtontro o Mukto ChintaDocument6 paginiShomajtontro o Mukto ChintamanzurcpbÎncă nu există evaluări
- Steam Tracing SpecificationDocument1 paginăSteam Tracing Specificationgpskumar22Încă nu există evaluări
- VTU Previous Question Papers - Energy EngineeringDocument28 paginiVTU Previous Question Papers - Energy EngineeringRaviparasheraÎncă nu există evaluări
- Innio Appsheet Datacenter en A4 032023 Screen Ijb-323010-EnDocument9 paginiInnio Appsheet Datacenter en A4 032023 Screen Ijb-323010-EnBudi Wibowo PurwosoedharmoÎncă nu există evaluări
- Seminar On:: Generation of Electricity From Speed Breakers (Power HumpDocument34 paginiSeminar On:: Generation of Electricity From Speed Breakers (Power HumpAnu KpÎncă nu există evaluări
- Wind Power Plant (English Paper) FixDocument13 paginiWind Power Plant (English Paper) FixYassar BarcaÎncă nu există evaluări
- Paper 2 - Set B Solutions: General InstructionsDocument14 paginiPaper 2 - Set B Solutions: General Instructionsrashm006ranjanÎncă nu există evaluări
- ASHRAE Journal - Select & Control Economizer Dampers in VAV Systems - TaylorDocument7 paginiASHRAE Journal - Select & Control Economizer Dampers in VAV Systems - Taylorsajuhere100% (1)
- Design & Development of Air Release Valve/Anti Vacuum Valve For High PressureDocument4 paginiDesign & Development of Air Release Valve/Anti Vacuum Valve For High PressureDheeraj ThakurÎncă nu există evaluări
- Safety ClearanceDocument19 paginiSafety ClearanceAnand AgrawalÎncă nu există evaluări
- Tugas Kedua: Nama: Gabriella Lisugau NIM: D081191013 Mata Kuliah: Bangunan KapalDocument7 paginiTugas Kedua: Nama: Gabriella Lisugau NIM: D081191013 Mata Kuliah: Bangunan KapalIvan Andi PaliwanÎncă nu există evaluări
- FactDocument108 paginiFacttariq76Încă nu există evaluări
- Mat PowerDocument7 paginiMat PowerNathan SitohangÎncă nu există evaluări
- FYP 1 - Interim ReportDocument32 paginiFYP 1 - Interim ReportJohn Rayz0% (1)
- HW1 SolutionsDocument5 paginiHW1 Solutionsjoleo23Încă nu există evaluări
- Short Circuit in Power System: Technical Colloquium Indonesia PLN - ABBDocument43 paginiShort Circuit in Power System: Technical Colloquium Indonesia PLN - ABBCristian Aguilar QuintanillaÎncă nu există evaluări
- 380 VDC Power Distribution Alternatives For Datacom ApplicationsDocument33 pagini380 VDC Power Distribution Alternatives For Datacom ApplicationsSteven WangÎncă nu există evaluări
- Delta Solar VFD DrivesDocument4 paginiDelta Solar VFD DriveskanaliÎncă nu există evaluări
- LP ByPass SystemDocument43 paginiLP ByPass SystemAshwani Dogra50% (2)
- Industrial Technologies Program: Ultra-Low Nox Burners With Flue Gas Recirculation and Partial ReformerDocument2 paginiIndustrial Technologies Program: Ultra-Low Nox Burners With Flue Gas Recirculation and Partial ReformerOA AooÎncă nu există evaluări
- Workshop ENIG GabesDocument1 paginăWorkshop ENIG GabesharrazyÎncă nu există evaluări
- MAN TGX D38 Broschuere D38 EN PDFDocument12 paginiMAN TGX D38 Broschuere D38 EN PDFMAN Truck & Bus AG100% (1)
- Final Year Project 30 AprilDocument25 paginiFinal Year Project 30 AprilTobaÎncă nu există evaluări
- 28m Truck-Mounted Pump ConcreteDocument2 pagini28m Truck-Mounted Pump ConcreteDemçe Florjan100% (1)
- Psac2017 Grade6 Science PDFDocument16 paginiPsac2017 Grade6 Science PDFDefimediaÎncă nu există evaluări
- IKEA (2015), Sustainability ReportDocument94 paginiIKEA (2015), Sustainability ReportDWotherspoon22Încă nu există evaluări