S-ar putea să vă placă și
- Cache: Contents and IntroductionDocument13 paginiCache: Contents and IntroductionnishatfarhanÎncă nu există evaluări
- Cache Memory (Part 1)Document18 paginiCache Memory (Part 1)Avirup RayÎncă nu există evaluări
- Memory Cache (Finley 2000)Document15 paginiMemory Cache (Finley 2000)GoranÎncă nu există evaluări
- Memory HierarchyDocument10 paginiMemory HierarchySravana JyothiÎncă nu există evaluări
- Data and Instruction CachesDocument6 paginiData and Instruction Cachesmçmç ööçmçÎncă nu există evaluări
- Cache Memory in Computer OrganizatinDocument12 paginiCache Memory in Computer OrganizatinJohn Vincent BaylonÎncă nu există evaluări
- Cache MemoryDocument20 paginiCache MemoryKeshav Bharadwaj RÎncă nu există evaluări
- CS NoteDocument51 paginiCS Notesmita satpathyÎncă nu există evaluări
- Computer Organization and Architecture Module 3Document34 paginiComputer Organization and Architecture Module 3Assini Hussain100% (1)
- Memory Hierarchy - Introduction: Cost Performance of Memory ReferenceDocument52 paginiMemory Hierarchy - Introduction: Cost Performance of Memory Referenceravi_jolly223987Încă nu există evaluări
- Cache Memory: Replacement AlgorithmsDocument9 paginiCache Memory: Replacement AlgorithmsLohith LogaÎncă nu există evaluări
- Caches - Basic IdeaDocument11 paginiCaches - Basic IdeaJustin WilsonÎncă nu există evaluări
- MergedDocument106 paginiMergedokiokaxÎncă nu există evaluări
- COA Lecture 25 26Document13 paginiCOA Lecture 25 26Chhaveesh AgnihotriÎncă nu există evaluări
- Lec 6Document9 paginiLec 6Elisée NdjabuÎncă nu există evaluări
- 05) Cache Memory IntroductionDocument20 pagini05) Cache Memory IntroductionkoottyÎncă nu există evaluări
- Allocating Kernel Memory (Buddy System and Slab System)Document8 paginiAllocating Kernel Memory (Buddy System and Slab System)Danny MweeneÎncă nu există evaluări
- Cache Memory (Part 2)Document14 paginiCache Memory (Part 2)Avirup RayÎncă nu există evaluări
- Cache - Memory - ConceptDocument73 paginiCache - Memory - ConceptniÎncă nu există evaluări
- Rohini 41399022862Document4 paginiRohini 41399022862shraddhasmethriÎncă nu există evaluări
- COA Unit 3,4&5-Important QuestionDocument2 paginiCOA Unit 3,4&5-Important QuestioncherithsaireddyÎncă nu există evaluări
- Unit 5Document40 paginiUnit 5anand_duraiswamyÎncă nu există evaluări
- Mapping TechniquesDocument4 paginiMapping TechniquesBastin RogersÎncă nu există evaluări
- 15 JoP Mar 08Document1 pagină15 JoP Mar 08sgganeshÎncă nu există evaluări
- Cache DesignDocument59 paginiCache DesignChunkai HuangÎncă nu există evaluări
- Understand CPU Caching ConceptsDocument14 paginiUnderstand CPU Caching Conceptsabhijit-k_raoÎncă nu există evaluări
- CacheDocument4 paginiCacheMoises PedrazaÎncă nu există evaluări
- Cache1 2Document30 paginiCache1 2Venkat SrinivasanÎncă nu există evaluări
- Developing Kernels: Part 2: Algorithm Considerations, Multi-Kernel Programs and OptimizationDocument23 paginiDeveloping Kernels: Part 2: Algorithm Considerations, Multi-Kernel Programs and Optimizationproxymo1Încă nu există evaluări
- Design For PerformanceDocument34 paginiDesign For Performancec0de517e.blogspot.com100% (1)
- ACA Unit-5Document54 paginiACA Unit-5mannanabdulsattarÎncă nu există evaluări
- 1 - Memory Organization Module 4Document37 pagini1 - Memory Organization Module 4Lalala LandÎncă nu există evaluări
- Anatomy of A Program in MemoryDocument5 paginiAnatomy of A Program in Memorythong_bvtÎncă nu există evaluări
- Cse410 Sp09 Final SolDocument10 paginiCse410 Sp09 Final Soladchy7Încă nu există evaluări
- Memory Hierarchy SMTDocument8 paginiMemory Hierarchy SMTRajatÎncă nu există evaluări
- Anatomy of A Program in MemoryDocument19 paginiAnatomy of A Program in MemoryVictor J. PerniaÎncă nu există evaluări
- HW6Document3 paginiHW6Christopher LopezÎncă nu există evaluări
- Cache: Why Level It: Departamento de Informática, Universidade Do Minho 4710 - 057 Braga, Portugal Nunods@ipb - PTDocument8 paginiCache: Why Level It: Departamento de Informática, Universidade Do Minho 4710 - 057 Braga, Portugal Nunods@ipb - PTsothymohan1293Încă nu există evaluări
- Problems Memory HierarchyDocument27 paginiProblems Memory HierarchyCruise_IceÎncă nu există evaluări
- IITD Exam SolutionDocument9 paginiIITD Exam SolutionRohit JoshiÎncă nu există evaluări
- Cache Memory and Associative Memory 2.2.2Document7 paginiCache Memory and Associative Memory 2.2.2Arjun NainÎncă nu există evaluări
- 34-Cache Memory Block Identification in Direct Mapping, Associate Mapping and Set Associate-06-03-2Document36 pagini34-Cache Memory Block Identification in Direct Mapping, Associate Mapping and Set Associate-06-03-2Rishabh Paul 21BCE2019Încă nu există evaluări
- Hadoop QuestionsDocument41 paginiHadoop QuestionsAmit BhartiyaÎncă nu există evaluări
- Module 6 CO 2020Document40 paginiModule 6 CO 2020jinto0007Încă nu există evaluări
- Chapter 4 (Continued) : Caching Testing Memory ModulesDocument20 paginiChapter 4 (Continued) : Caching Testing Memory ModulesnewhondacityÎncă nu există evaluări
- Cache Organization (Direct Mapping)Document40 paginiCache Organization (Direct Mapping)ankesh45Încă nu există evaluări
- CS704 Finalterm QA Past PapersDocument20 paginiCS704 Finalterm QA Past PapersMuhammad MunirÎncă nu există evaluări
- Conspect of Lecture 7Document13 paginiConspect of Lecture 7arukaborbekovaÎncă nu există evaluări
- MathsDocument3 paginiMathssukanta majumderÎncă nu există evaluări
- 4 Unit Speed, Size and CostDocument5 pagini4 Unit Speed, Size and CostGurram SunithaÎncă nu există evaluări
- Lecture 5: Memory Hierarchy and Cache Traditional Four Questions For Memory Hierarchy DesignersDocument10 paginiLecture 5: Memory Hierarchy and Cache Traditional Four Questions For Memory Hierarchy Designersdeepu7deeptiÎncă nu există evaluări
- #Physicaldesign #StaDocument2 pagini#Physicaldesign #StaNishanth GowdaÎncă nu există evaluări
- CSA Quiz1 MT Burgos Ric CharlesDocument2 paginiCSA Quiz1 MT Burgos Ric CharlesCharles BurgosÎncă nu există evaluări
- Computer Organization AnswerDocument6 paginiComputer Organization Answersamir pramanikÎncă nu există evaluări
- Memory System: By: Solomon SDocument48 paginiMemory System: By: Solomon SAmanuelÎncă nu există evaluări
- KK List of Java 5Document7 paginiKK List of Java 5Smith F. JohnÎncă nu există evaluări
- COA Assignment: Ques 1) Describe The Principles of Magnetic DiskDocument8 paginiCOA Assignment: Ques 1) Describe The Principles of Magnetic DiskAasthaÎncă nu există evaluări
- Computer OrganizationDocument8 paginiComputer Organizationmeenakshimeenu480Încă nu există evaluări
- Cache 13115Document20 paginiCache 13115rohan KottawarÎncă nu există evaluări
- Terex Auger ToolsDocument18 paginiTerex Auger ToolsvivalpsÎncă nu există evaluări
- Agilent J3915A V Series Wanprobe: Installation/User'S GuideDocument217 paginiAgilent J3915A V Series Wanprobe: Installation/User'S GuidehulioÎncă nu există evaluări
- Android Application DevelopmentDocument1 paginăAndroid Application DevelopmentK S SAI PRASADÎncă nu există evaluări
- Industrial Disaster ManagementDocument68 paginiIndustrial Disaster ManagementMaheshchandra Yadav100% (1)
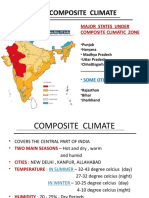
- Composite Climate: Major States Under Composite Climatic ZoneDocument25 paginiComposite Climate: Major States Under Composite Climatic ZoneSporty Game100% (1)
- The Chow CollectionDocument51 paginiThe Chow CollectionStephen ChowÎncă nu există evaluări
- 15 Ceragon IP 10G EMS BackupDocument26 pagini15 Ceragon IP 10G EMS BackupAlejandro GaunaÎncă nu există evaluări
- Defensive Programming To Reduce PHP VulnerabilitiesDocument5 paginiDefensive Programming To Reduce PHP VulnerabilitiessureshÎncă nu există evaluări
- Electric Wires and CablesDocument9 paginiElectric Wires and Cableswafikmh4Încă nu există evaluări
- Information Technology VocabularyDocument2 paginiInformation Technology VocabularyCasa NaluÎncă nu există evaluări
- Slab CulvertDocument1 paginăSlab CulvertSivaramakrishnaNalluri100% (1)
- Power Consumption DetailsDocument6 paginiPower Consumption DetailsAyicÎncă nu există evaluări
- Utilization of Recycled Polyethylene Terephthalate (PET) in Engineering Materials: A ReviewDocument9 paginiUtilization of Recycled Polyethylene Terephthalate (PET) in Engineering Materials: A ReviewShaker MahmoodÎncă nu există evaluări
- BBMP WardsDocument116 paginiBBMP WardsExpress WebÎncă nu există evaluări
- HRD C Frame Anchor TDSDocument18 paginiHRD C Frame Anchor TDSronyÎncă nu există evaluări
- Approach Sight Singing Fifth EditionDocument3 paginiApproach Sight Singing Fifth Editionfbshow0% (2)
- SRIM ReadMe (English-2011)Document4 paginiSRIM ReadMe (English-2011)Miguel MagallanesÎncă nu există evaluări
- XMS Administration Guide Xmsadm - v21-410Document136 paginiXMS Administration Guide Xmsadm - v21-410NugrohoÎncă nu există evaluări
- SSUDocument489 paginiSSUAdrian Marius100% (1)
- Calculation of Quantity of Cement Mortar in Brickwork and PlasterDocument2 paginiCalculation of Quantity of Cement Mortar in Brickwork and PlasterYathish1430% (1)
- Heating, Home Inspection Course and Exam - North America, CanadaDocument56 paginiHeating, Home Inspection Course and Exam - North America, CanadaAli Noroozi100% (1)
- Air System Sizing Summary For FF01-GRADE 1Document13 paginiAir System Sizing Summary For FF01-GRADE 1Thahar ali syedÎncă nu există evaluări
- SUNNIK HDG CatalogueDocument6 paginiSUNNIK HDG CataloguesifusanÎncă nu există evaluări
- LCS Architecture For LTE EPSDocument3 paginiLCS Architecture For LTE EPSgare69Încă nu există evaluări
- FivecornerDocument4 paginiFivecornerPebrian SyahÎncă nu există evaluări
- Es 4 SolutionDocument7 paginiEs 4 SolutionshimelisÎncă nu există evaluări
- Bates Motel 1x01 PilotDocument61 paginiBates Motel 1x01 PilotAaron MccallÎncă nu există evaluări
- Node JsDocument32 paginiNode Jssteamer92Încă nu există evaluări
- 3 4 2 A ParkinglotdesignDocument3 pagini3 4 2 A Parkinglotdesignapi-300375532Încă nu există evaluări