S-ar putea să vă placă și
- Problemas de TermoDocument3 paginiProblemas de TermoAlan CortesÎncă nu există evaluări
- Parcial No 2 - MecanismosDocument2 paginiParcial No 2 - MecanismosRonys VillalobosÎncă nu există evaluări
- Proceso Tostacio N Molibdeno AltonorteDocument39 paginiProceso Tostacio N Molibdeno AltonorteLuis Felipe SAÎncă nu există evaluări
- Análisis Dinámico de Mecanismos 2021-1 - Sesion6Document76 paginiAnálisis Dinámico de Mecanismos 2021-1 - Sesion6Walter Raul Valentin AlvarezÎncă nu există evaluări
- Tarea IngenieriaDocument3 paginiTarea IngenieriaSilvia LoayzaÎncă nu există evaluări
- Ejercicios Dinamica Vectorial, Con Respuesta.Document10 paginiEjercicios Dinamica Vectorial, Con Respuesta.MauricioSandovalÎncă nu există evaluări
- TEMA 2 - EJERCICIOS+completos - EnunciadosDocument7 paginiTEMA 2 - EJERCICIOS+completos - EnunciadosDavid VictoresÎncă nu există evaluări
- Cuaderno de Problemas Mec. Maq - ALUMNOS PDFDocument37 paginiCuaderno de Problemas Mec. Maq - ALUMNOS PDFAntonio CabreroÎncă nu există evaluări
- 4º Parcial de Mecanismos: Ingeniería Mecatrónica Tema Diseño de Levas Y Trenes de EngranajesDocument1 pagină4º Parcial de Mecanismos: Ingeniería Mecatrónica Tema Diseño de Levas Y Trenes de Engranajesjavier andres perez gomezÎncă nu există evaluări
- Ex 2Document6 paginiEx 2Roberto Quintero EÎncă nu există evaluări
- Boletin T2-Geometria - Retorno Rapido 03Document4 paginiBoletin T2-Geometria - Retorno Rapido 03academiaceltaÎncă nu există evaluări
- GTP #10 - 23 - FM Cinematica RotaciónDocument3 paginiGTP #10 - 23 - FM Cinematica Rotaciónlelemhofer07Încă nu există evaluări
- Proyecto BRAZO ROBOTICODocument9 paginiProyecto BRAZO ROBOTICOandres felipe sandoval porrasÎncă nu există evaluări
- TD Tema 4-5. CIN Y DIN MECANISMOS PLANOS Enonce CorrectionDocument8 paginiTD Tema 4-5. CIN Y DIN MECANISMOS PLANOS Enonce CorrectionLuc AusterÎncă nu există evaluări
- TD Tema 4-5. CIN Y DIN MECANISMOS PLANOS EnonceDocument8 paginiTD Tema 4-5. CIN Y DIN MECANISMOS PLANOS EnonceLuc AusterÎncă nu există evaluări
- ProblemasDocument40 paginiProblemasManuel Pomares DiazÎncă nu există evaluări
- Sintes 1Document42 paginiSintes 1Ivan GarzonÎncă nu există evaluări
- Taller 1. - Fuera Loor - DinámicaDocument10 paginiTaller 1. - Fuera Loor - DinámicaRonald CañarÎncă nu există evaluări
- Teoria Del Primer LaboratorioDocument8 paginiTeoria Del Primer LaboratorioJUNIOR CCAIHUARI HOYOSÎncă nu există evaluări
- 2 Taller Sistemas Y Diseño MecánicoDocument2 pagini2 Taller Sistemas Y Diseño MecánicoAlejandro Lòpez AyalaÎncă nu există evaluări
- Informe Proyecto DIN Final PDFDocument37 paginiInforme Proyecto DIN Final PDFCesar GilÎncă nu există evaluări
- Calculos Cruz de Malta PDFDocument7 paginiCalculos Cruz de Malta PDFEstefany Ortiz CarmonaÎncă nu există evaluări
- Serie 4 CydDocument5 paginiSerie 4 CydAbril RivasÎncă nu există evaluări
- Problemas Dinamica 13 14aDocument12 paginiProblemas Dinamica 13 14akoalagris0% (1)
- Informe Laboratorio02Document11 paginiInforme Laboratorio02Irving JoséÎncă nu există evaluări
- Juntas y Acoples UniversalesDocument34 paginiJuntas y Acoples Universalesdocs.isc23Încă nu există evaluări
- Integrador Mecánica TécnicaDocument3 paginiIntegrador Mecánica TécnicaFabian PobletÎncă nu există evaluări
- Cuerpo RigidoDocument8 paginiCuerpo RigidoDiana R. CermeñoÎncă nu există evaluări
- Tema 2 Geometria-Retorno - RapidoDocument4 paginiTema 2 Geometria-Retorno - RapidoFresa ChocolateÎncă nu există evaluări
- Diseno de Maquinas SchaumDocument346 paginiDiseno de Maquinas Schaumdiabliego100% (3)
- Treth RTBNDJ JBDDDocument150 paginiTreth RTBNDJ JBDDJake CloneyÎncă nu există evaluări
- Examen Febrero Elect 26d01d2016 v2Document6 paginiExamen Febrero Elect 26d01d2016 v2Vreyes1981Încă nu există evaluări
- SolucioinesDocument77 paginiSolucioinesManuel Pomares DiazÎncă nu există evaluări
- Taller 9 Rotación de Un Cuerpo RígidoDocument4 paginiTaller 9 Rotación de Un Cuerpo RígidosamuelcanoazÎncă nu există evaluări
- MiniproyectoDocument23 paginiMiniproyectotomasÎncă nu există evaluări
- Ejercicios U2Document4 paginiEjercicios U2Lazaro GarciaÎncă nu există evaluări
- PRESENTACION ACOPLES y JUNTAS 2020 PDFDocument23 paginiPRESENTACION ACOPLES y JUNTAS 2020 PDFMacarena CintioÎncă nu există evaluări
- Examen4a S CamiloDocument5 paginiExamen4a S CamiloEdison JaimeÎncă nu există evaluări
- Boletin - T2-Geometrà A - AlumnosDocument4 paginiBoletin - T2-Geometrà A - Alumnosxx6vhyj4cmÎncă nu există evaluări
- Deber 2Document7 paginiDeber 2Itaty PolancoÎncă nu există evaluări
- Cinemática y Dinámica Del Movimiento CircularDocument5 paginiCinemática y Dinámica Del Movimiento CircularGago_88Încă nu există evaluări
- 05 - Momento Cinético - Con Notas de Ayuda.Document3 pagini05 - Momento Cinético - Con Notas de Ayuda.Carlos Lema MiguénsÎncă nu există evaluări
- TP1 2022Document22 paginiTP1 2022Jose BenitezÎncă nu există evaluări
- CCR Electrica 19Document19 paginiCCR Electrica 19Gaston Ezequiel RimbanoÎncă nu există evaluări
- 4 Problemas 2017Document23 pagini4 Problemas 2017LuanaVilteÎncă nu există evaluări
- B Problemas CinematicaDocument19 paginiB Problemas Cinematicajavi205Încă nu există evaluări
- Movimiento CircularDocument38 paginiMovimiento CircularAngel StoneÎncă nu există evaluări
- Mecanismos de Eslabones ArticularesDocument11 paginiMecanismos de Eslabones ArticularesCarlos JaureguiÎncă nu există evaluări
- Hélice - Capitulo 3Document29 paginiHélice - Capitulo 3Edson AlejosÎncă nu există evaluări
- Rejunte de Parciales Prácticos - MRDocument26 paginiRejunte de Parciales Prácticos - MRrodrigo cicuttoÎncă nu există evaluări
- G 6 Cuerpo RigidoDocument7 paginiG 6 Cuerpo RigidoJean Carlos MontesdeocaÎncă nu există evaluări
- Ondas y CalorDocument5 paginiOndas y CalorYi Jung Edmen Gutierrez MamaniÎncă nu există evaluări
- Movimiento Circular y LinealDocument12 paginiMovimiento Circular y LinealsergievitchÎncă nu există evaluări
- Taller MecDocument8 paginiTaller MecWilliam GuamanÎncă nu există evaluări
- 2 ParcialDocument4 pagini2 ParcialDAvudÎncă nu există evaluări
- Arbol de LevasDocument24 paginiArbol de LevasMaquinaria PesadaÎncă nu există evaluări
- TP9 F1 9Document3 paginiTP9 F1 9Daiana GomezÎncă nu există evaluări
- Tarea 3 de DinámicaDocument6 paginiTarea 3 de DinámicaAndrés LimaÎncă nu există evaluări
- Guia de Problemas N7 - Mecanica Del Cuerpo Rigido Con SolucionesDocument9 paginiGuia de Problemas N7 - Mecanica Del Cuerpo Rigido Con Solucionesescobarhugo002Încă nu există evaluări
- Ejercicios de Integrales de Línea, Superficie y VolumenDe la EverandEjercicios de Integrales de Línea, Superficie y VolumenEvaluare: 4 din 5 stele4/5 (2)
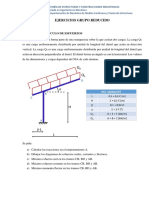
- Ejercicios Grupo Reducido PDFDocument5 paginiEjercicios Grupo Reducido PDFDavid VictoresÎncă nu există evaluări
- Mecánica de Sólidos - Hoja 1 de Ejercicios - Curso 2018-2019Document5 paginiMecánica de Sólidos - Hoja 1 de Ejercicios - Curso 2018-2019David VictoresÎncă nu există evaluări
- Problemas de ResistenciaDocument1 paginăProblemas de ResistenciaDavid VictoresÎncă nu există evaluări
- Ejercicios Tema 1 - Enunciados - 18 - 19Document2 paginiEjercicios Tema 1 - Enunciados - 18 - 19David VictoresÎncă nu există evaluări
- Enunciados Fatiga2015Document10 paginiEnunciados Fatiga2015David VictoresÎncă nu există evaluări
- TECMECDocument15 paginiTECMECDavid VictoresÎncă nu există evaluări
- Def Plastica 4-Test Plegado Problema Util ProgresivoDocument5 paginiDef Plastica 4-Test Plegado Problema Util ProgresivoDavid VictoresÎncă nu există evaluări
- El Jardinero Fiel DAVID VICTORESDocument5 paginiEl Jardinero Fiel DAVID VICTORESDavid Victores100% (1)
- Practica 1 InstalacionesDocument9 paginiPractica 1 InstalacionesDavid VictoresÎncă nu există evaluări
- Examen 18 Junio 2012 Preguntas PDFDocument3 paginiExamen 18 Junio 2012 Preguntas PDFDavid VictoresÎncă nu există evaluări
- Def Plastica 3-Test Corte y PunzonadoDocument3 paginiDef Plastica 3-Test Corte y PunzonadoDavid VictoresÎncă nu există evaluări
- Contenido Programatico ElectivaDocument5 paginiContenido Programatico ElectivaOscar foreroÎncă nu există evaluări
- Flujo Turbulento - UDocument34 paginiFlujo Turbulento - Ubrandon lopezÎncă nu există evaluări
- Historia de La Ingenieria AntisismicaDocument11 paginiHistoria de La Ingenieria AntisismicaLuis Armando Cuzco Trigozo100% (1)
- Fuerzas IntermolecularesDocument4 paginiFuerzas IntermolecularesAgustina RiveroÎncă nu există evaluări
- 37 Reservorio Apoyado 10 m3 - CalculoDocument30 pagini37 Reservorio Apoyado 10 m3 - CalculoandreacorazonÎncă nu există evaluări
- Calor y TemperaturaDocument30 paginiCalor y TemperaturamilenkaÎncă nu există evaluări
- Diseño Electrico PDFDocument21 paginiDiseño Electrico PDFMelissa F. MartinezÎncă nu există evaluări
- Escala de Colores de La Onda 2.6.2Document7 paginiEscala de Colores de La Onda 2.6.2OSCAR CARDONA PANTOJAÎncă nu există evaluări
- Tema 5. TareasDocument2 paginiTema 5. Tareasthiago mendesÎncă nu există evaluări
- Elasticidad Cinta de GomaDocument3 paginiElasticidad Cinta de GomadfgjÎncă nu există evaluări
- Pelandintecno - 2ESO-T6 - Electricidad - 2019v2Document12 paginiPelandintecno - 2ESO-T6 - Electricidad - 2019v2Alan ChávezÎncă nu există evaluări
- PresentaciOn Mercadoelectrico Angel Arias INACAP IngenieroDocument49 paginiPresentaciOn Mercadoelectrico Angel Arias INACAP IngenieroJavier Hidalgo PachecoÎncă nu există evaluări
- COLUMNAS Con Carga CentradaDocument30 paginiCOLUMNAS Con Carga CentradaRenzo Arquíñigo VidalÎncă nu există evaluări
- Informe Practica 4 - FisicaDocument14 paginiInforme Practica 4 - FisicaJheysson Hurtado MoranteÎncă nu există evaluări
- AR 3000 Bobinas Dobles y Detalles. ANEXO 1 Al Manual de Construccion.Document11 paginiAR 3000 Bobinas Dobles y Detalles. ANEXO 1 Al Manual de Construccion.Wilberr YriarteÎncă nu există evaluări
- Propiedades de Los Fluidos - Exposicion 1Document26 paginiPropiedades de Los Fluidos - Exposicion 1Alexander Amadeo Garcia CruzÎncă nu există evaluări
- Lab #12 - Circuito Serie Paralelo y Mixto 03Document8 paginiLab #12 - Circuito Serie Paralelo y Mixto 03Xiomara Gomez CondeÎncă nu există evaluări
- Problemas CINEMATICA PDFDocument1 paginăProblemas CINEMATICA PDFJuan TrujilloÎncă nu există evaluări
- Modelado Interruptor de PotenciaDocument0 paginiModelado Interruptor de Potenciasmart28Încă nu există evaluări
- ELECTROSTÁTICA0001Document27 paginiELECTROSTÁTICA000128SOLESÎncă nu există evaluări
- Fisica Guias 10 y 11 (2020)Document20 paginiFisica Guias 10 y 11 (2020)kogui de mulkwakunguiÎncă nu există evaluări
- AntenasDocument46 paginiAntenasglamaizveÎncă nu există evaluări
- 2013 Leading Knowledge Esp Seg WebDocument47 pagini2013 Leading Knowledge Esp Seg WebainogÎncă nu există evaluări
- Informe N2 Fisica IiDocument10 paginiInforme N2 Fisica IiUriel DLCCÎncă nu există evaluări
- Informe de Péndulo SimpleDocument16 paginiInforme de Péndulo SimpleAndreinä SilväÎncă nu există evaluări
- Tema 1. Introduccion A La RadiologiaDocument48 paginiTema 1. Introduccion A La RadiologiaDaniel Herrera0% (1)
- Quimica Patrick MirandaDocument12 paginiQuimica Patrick MirandaAlex RochaÎncă nu există evaluări
- Examenes EstructurasDocument20 paginiExamenes EstructurasAndres Leon ChuquirunaÎncă nu există evaluări