S-ar putea să vă placă și
- The Grid 2: Blueprint for a New Computing InfrastructureDe la EverandThe Grid 2: Blueprint for a New Computing InfrastructureÎncă nu există evaluări
- Pilatus Aircraft LTD PC 12 MMOPDocument8 paginiPilatus Aircraft LTD PC 12 MMOPJulian BermudezÎncă nu există evaluări
- 05 VAR 5 Approved Aircraft Maintenance Organization 3 2018Document38 pagini05 VAR 5 Approved Aircraft Maintenance Organization 3 2018Duong Tram100% (1)
- The Market For Aviation Turboprop EnginesDocument18 paginiThe Market For Aviation Turboprop EnginesEuber RondonÎncă nu există evaluări
- Sensitivity of Engine Performance To Component Degradation of A Turbofan Aircraft EngineDocument111 paginiSensitivity of Engine Performance To Component Degradation of A Turbofan Aircraft EngineAdeyemi Oluwaseun EmmanuelÎncă nu există evaluări
- Aircraft APU Emissions at Zurich AirportDocument18 paginiAircraft APU Emissions at Zurich AirportAnonymous TDyZWu22S3Încă nu există evaluări
- Amt PR AktsDocument145 paginiAmt PR Aktsgantuya battulgaÎncă nu există evaluări
- AO 2013 154 Final PDFDocument19 paginiAO 2013 154 Final PDFMorgen GumpÎncă nu există evaluări
- Aero Supplies - Catalogue CHAPTER 6 (505-595) PDFDocument91 paginiAero Supplies - Catalogue CHAPTER 6 (505-595) PDFJerome Cardenas TablacÎncă nu există evaluări
- Good 5989-7575en - Radar MeasurementsDocument88 paginiGood 5989-7575en - Radar MeasurementspablocotanÎncă nu există evaluări
- Back To BasicsDocument13 paginiBack To BasicsBruno SantosÎncă nu există evaluări
- 412CRO412CROCH63Document468 pagini412CRO412CROCH63252nd PAS100% (1)
- C47E OMM Inspection ChecksheetsDocument13 paginiC47E OMM Inspection ChecksheetsturboshaftÎncă nu există evaluări
- A Seminar Report On Aircraft Propulsion SystemDocument24 paginiA Seminar Report On Aircraft Propulsion SystemMallikarjun KesarabhaviÎncă nu există evaluări
- THF Aw169 15 10-1Document92 paginiTHF Aw169 15 10-1Itamar Ponciano SouzaÎncă nu există evaluări
- AviallDocument6 paginiAviallLindgrenÎncă nu există evaluări
- Magnetic Chip Detector (MCD) Wear Particle AnalysisDocument5 paginiMagnetic Chip Detector (MCD) Wear Particle AnalysisaloordominicÎncă nu există evaluări
- Annex III To Decision 2015-029-R - (AMC-GM Part-66) PDFDocument110 paginiAnnex III To Decision 2015-029-R - (AMC-GM Part-66) PDFKetanRaoÎncă nu există evaluări
- m250 Lessons LearnedDocument6 paginim250 Lessons LearnedEstevamÎncă nu există evaluări
- Un SchEDULE InspECTION Q & ADocument19 paginiUn SchEDULE InspECTION Q & APRASADÎncă nu există evaluări
- Actuation Propeller SystemsDocument3 paginiActuation Propeller Systemsbaldevram.214Încă nu există evaluări
- 01 Introduction To Recip Engine (Ignition)Document84 pagini01 Introduction To Recip Engine (Ignition)Jaja Jaapari100% (1)
- Blackhawk XP135A Engine Upgrade King Air 90 SeriesDocument2 paginiBlackhawk XP135A Engine Upgrade King Air 90 SeriesjhÎncă nu există evaluări
- Specs DHC6-msn-846Document10 paginiSpecs DHC6-msn-846Bob DENARDÎncă nu există evaluări
- StandardAero - PW100 EngineDocument2 paginiStandardAero - PW100 EnginechanduÎncă nu există evaluări
- MRB Tasks Revision Highlight: Summary List of ChangesDocument25 paginiMRB Tasks Revision Highlight: Summary List of Changesom prakash patelÎncă nu există evaluări
- DanielMartins ThesisDocument114 paginiDanielMartins ThesisHamedÎncă nu există evaluări
- POH P92 Eaglet English ManualDocument65 paginiPOH P92 Eaglet English ManualRudy Ruddon AttomsÎncă nu există evaluări
- Aero Metals Vertical ArticleDocument8 paginiAero Metals Vertical ArticleRob ZelÎncă nu există evaluări
- FS - M - Sikorsky S 70A L UH 60 A L Maintenance PracticalDocument1 paginăFS - M - Sikorsky S 70A L UH 60 A L Maintenance PracticalAustin BanttariÎncă nu există evaluări
- PT6A Small Customer Training OptimizadoDocument221 paginiPT6A Small Customer Training Optimizadonestor ivan jerez francoÎncă nu există evaluări
- Acknowledgement: MR - MANIMARAN, Mfg. Manager Process Shop Engine Division, HAL Whose Kind CoDocument53 paginiAcknowledgement: MR - MANIMARAN, Mfg. Manager Process Shop Engine Division, HAL Whose Kind CoAmitha ReddyÎncă nu există evaluări
- DHC-6 300 MX Service Bulletin SupplementDocument57 paginiDHC-6 300 MX Service Bulletin SupplementHéctor SánchezÎncă nu există evaluări
- Helicopter Aerodynamics Structures and Systems SyllabusDocument7 paginiHelicopter Aerodynamics Structures and Systems Syllabuskp subediÎncă nu există evaluări
- 03 407 - 407GX - 407GXi B2 Electrical and Starting 2021JUN02Document96 pagini03 407 - 407GX - 407GXi B2 Electrical and Starting 2021JUN02echaletintaÎncă nu există evaluări
- 13 747 400F Differences V11Document12 pagini13 747 400F Differences V11Alfonso Enrrique Maya FlorezÎncă nu există evaluări
- Aircraft Cabin Interiors MarketDocument7 paginiAircraft Cabin Interiors MarketsajeshsimonÎncă nu există evaluări
- F Maintenance Program Planning ServicesDocument272 paginiF Maintenance Program Planning ServicesFaisÎncă nu există evaluări
- Pt6a Fuel Nozzle Informational SheetDocument1 paginăPt6a Fuel Nozzle Informational SheetMeriem BouzerzourÎncă nu există evaluări
- 9757 GB Aircraft Assembly Maintenance ToolsDocument12 pagini9757 GB Aircraft Assembly Maintenance ToolsMário OliveiraÎncă nu există evaluări
- CL 604-Landing Gear and BrakesDocument26 paginiCL 604-Landing Gear and BrakesJamesÎncă nu există evaluări
- Sae Arp 5483-8 2002 (En) PDFDocument9 paginiSae Arp 5483-8 2002 (En) PDFWilliam LooÎncă nu există evaluări
- Mro Network'S Annual Publication For The Aero-Engine ProfessionalDocument108 paginiMro Network'S Annual Publication For The Aero-Engine ProfessionalPaul John BalbuenaÎncă nu există evaluări
- Engine LimitationDocument19 paginiEngine LimitationRatsimba AndryÎncă nu există evaluări
- CAR2023 EngDocument195 paginiCAR2023 EngRian AulianzaÎncă nu există evaluări
- Trent 700 Infographic 1 PDFDocument1 paginăTrent 700 Infographic 1 PDFmuhammad syahmi amir hamzahÎncă nu există evaluări
- CFM 56-7b New Design Fan Blade Platform InterchangeabilityDocument3 paginiCFM 56-7b New Design Fan Blade Platform InterchangeabilityJJ100% (1)
- Rotables ManagementDocument4 paginiRotables ManagementSyed SameemÎncă nu există evaluări
- M250-C30R3M Inspection Check SheetsDocument15 paginiM250-C30R3M Inspection Check SheetsturboshaftÎncă nu există evaluări
- Helicopter Market Report - Ascend PDFDocument8 paginiHelicopter Market Report - Ascend PDFamoolrainaÎncă nu există evaluări
- Service Information Letter: Flight Management System (FMS) Version MatrixDocument7 paginiService Information Letter: Flight Management System (FMS) Version MatrixAlphard DarmawanÎncă nu există evaluări
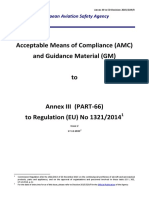
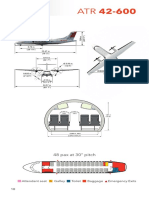
- 48 Pax at 30" Pitch: Attendant Seat Galley Toilet Baggage Emergency ExitsDocument2 pagini48 Pax at 30" Pitch: Attendant Seat Galley Toilet Baggage Emergency ExitsEstebanÎncă nu există evaluări
- CIRP Annals - Manufacturiing TechnologyDocument24 paginiCIRP Annals - Manufacturiing Technologysubramanian pramodhÎncă nu există evaluări
- Blackhawk EPIC XPR Series BrochureDocument3 paginiBlackhawk EPIC XPR Series Brochurealbucur100% (1)
- ATA 61 Rev2Document140 paginiATA 61 Rev2Ara100% (1)
- Steadycontrol® Rotor: New Technology For Rotor Track and Balance TuningDocument13 paginiSteadycontrol® Rotor: New Technology For Rotor Track and Balance TuningrobinyÎncă nu există evaluări
- Aerodynamics and Aircraft PropulsionDocument25 paginiAerodynamics and Aircraft PropulsionNarendra PalandeÎncă nu există evaluări
- Ats Tbo Hsi Interval GuideDocument1 paginăAts Tbo Hsi Interval GuideFran GaritaÎncă nu există evaluări
- Gelbyson HS AuxiliaryPowerUnits APUDocument4 paginiGelbyson HS AuxiliaryPowerUnits APUcypÎncă nu există evaluări
- Icici Pru Iprotect Smart: A Term Life Insurance PlanDocument60 paginiIcici Pru Iprotect Smart: A Term Life Insurance PlanChetan NangaliaÎncă nu există evaluări
- ICICI Pru IprotectDocument41 paginiICICI Pru Iprotectsaravanaraj4uÎncă nu există evaluări
- Full HOQ 0.9Document1 paginăFull HOQ 0.9Hou HonÎncă nu există evaluări
- PRO0473 InstaProtect LeafletDocument2 paginiPRO0473 InstaProtect Leafletsaravanaraj4uÎncă nu există evaluări
- Tata AIA Life Insurance Non-Linked Comprehensive Health Rider (UIN: 110B031V02)Document28 paginiTata AIA Life Insurance Non-Linked Comprehensive Health Rider (UIN: 110B031V02)saravanaraj4uÎncă nu există evaluări
- Fair On Khan-Eating Grass-JSS 36 4Document10 paginiFair On Khan-Eating Grass-JSS 36 4saravanaraj4uÎncă nu există evaluări
- NewSyllabus 14572015101426189Document3 paginiNewSyllabus 14572015101426189saravanaraj4uÎncă nu există evaluări
- AyurvedaDocument83 paginiAyurvedaKamlesh Maheshwari100% (6)
- Game CrashDocument9 paginiGame Crashsaravanaraj4uÎncă nu există evaluări
- Oct To Dec 2018 BillDocument1 paginăOct To Dec 2018 Billsaravanaraj4uÎncă nu există evaluări
- Acknowledgement Slip: Aadhaar Self Service Update PortalDocument1 paginăAcknowledgement Slip: Aadhaar Self Service Update Portalsaravanaraj4uÎncă nu există evaluări
- Oct To Dec 2018Document1 paginăOct To Dec 2018saravanaraj4uÎncă nu există evaluări
- Game LogDocument77 paginiGame Logsaravanaraj4uÎncă nu există evaluări
- Indian Institute of Technology Kharagpur: Academic Calendar For The Session 2018-2019Document8 paginiIndian Institute of Technology Kharagpur: Academic Calendar For The Session 2018-2019Gin ManÎncă nu există evaluări
- Ee101 Lec2 Slidespost PDFDocument14 paginiEe101 Lec2 Slidespost PDFsaravanaraj4uÎncă nu există evaluări
- Estimation of The Parameters For A Complex Repairable System With Preventive and Corrective MaintenanceDocument7 paginiEstimation of The Parameters For A Complex Repairable System With Preventive and Corrective Maintenancesaravanaraj4uÎncă nu există evaluări
- CSDDocument11 paginiCSDsaravanaraj4uÎncă nu există evaluări
- On Determining Optimal Inspection Interval For Minimizing Maintenance CostDocument7 paginiOn Determining Optimal Inspection Interval For Minimizing Maintenance Costsaravanaraj4uÎncă nu există evaluări
- Introduction To Naval Weapons EngineeringDocument20 paginiIntroduction To Naval Weapons Engineeringsaravanaraj4uÎncă nu există evaluări
- Indian Institute of Technology Kharagpur: Academic Calendar For The Session 2018-2019Document8 paginiIndian Institute of Technology Kharagpur: Academic Calendar For The Session 2018-2019Gin ManÎncă nu există evaluări
- Luna-3E: Optical Landing SystemDocument2 paginiLuna-3E: Optical Landing Systemsaravanaraj4uÎncă nu există evaluări
- Salary Forecast For Seventh Pay CommissionDocument2 paginiSalary Forecast For Seventh Pay Commissionsaravanaraj4uÎncă nu există evaluări
- Electrical Machinery by Dr. P S BimbhraDocument339 paginiElectrical Machinery by Dr. P S BimbhraNikhilÎncă nu există evaluări
- Vol.8 Principles of FlightDocument286 paginiVol.8 Principles of Flightsaravanaraj4u100% (1)
- MC 101Document720 paginiMC 101Anamika Rai PandeyÎncă nu există evaluări
- Annual Shipping Report 2016Document154 paginiAnnual Shipping Report 2016saravanaraj4uÎncă nu există evaluări
- 9 PDFDocument10 pagini9 PDFdharul khairÎncă nu există evaluări
- SampleQues AME PDFDocument23 paginiSampleQues AME PDFPushpa RajÎncă nu există evaluări
- 0206153631guidelines For Purchase of 2 Jun 15Document4 pagini0206153631guidelines For Purchase of 2 Jun 15saravanaraj4uÎncă nu există evaluări
- Mil DTL 24211CDocument8 paginiMil DTL 24211CmurphygtÎncă nu există evaluări
- Airborne Weather Radar: PART II: Theory & Operation For More Effective TroubleshootingDocument8 paginiAirborne Weather Radar: PART II: Theory & Operation For More Effective Troubleshootingsaravanaraj4u100% (1)
- Waveguide MicrowaveDocument23 paginiWaveguide Microwaverdddx100% (1)
- AEA RadarTrainingDocument48 paginiAEA RadarTrainingCarlos Enrique100% (1)
- Microwave Solid Antennas 267-322Document56 paginiMicrowave Solid Antennas 267-322Mahlet EshetuÎncă nu există evaluări
- Flexible WaveguideDocument12 paginiFlexible WaveguideTaha TounsiÎncă nu există evaluări