S-ar putea să vă placă și
- 1.4 LINE Function - Output PrimitiveDocument18 pagini1.4 LINE Function - Output Primitivemani12345Încă nu există evaluări
- Output Primitive Attributes: Lines, Curves, Colors, Areas and TextDocument13 paginiOutput Primitive Attributes: Lines, Curves, Colors, Areas and Textrcpasc100% (3)
- 1.1 POINTS & LINE - Output PrimitiveDocument24 pagini1.1 POINTS & LINE - Output Primitivemani12345100% (1)
- 1.8 Curve Attributes - Attributes of OutputDocument21 pagini1.8 Curve Attributes - Attributes of Outputmani12345Încă nu există evaluări
- 1.9 Color and Gray Scale - Attributes of OutputDocument26 pagini1.9 Color and Gray Scale - Attributes of Outputmani12345100% (1)
- Computer Graphics Q N A'sDocument57 paginiComputer Graphics Q N A'sReshma BJ100% (4)
- 1.5 CIRCLE GENERATING - Output PrimitiveDocument35 pagini1.5 CIRCLE GENERATING - Output Primitivemani12345100% (1)
- Frame Buffer LoadingDocument18 paginiFrame Buffer Loadingmani1234575% (4)
- Computer Graphics Sample Question PapersDocument4 paginiComputer Graphics Sample Question Papersrohit sanjay shindeÎncă nu există evaluări
- Basics - Inbuilt Functions in Computer GraphicsDocument5 paginiBasics - Inbuilt Functions in Computer GraphicsRishabh jain25% (4)
- Viewing Pipeline, Viewing Coordinate Reference FrameDocument15 paginiViewing Pipeline, Viewing Coordinate Reference FrameLaat SahabÎncă nu există evaluări
- 1.7 Line Attributes - Attributes of OutputDocument22 pagini1.7 Line Attributes - Attributes of Outputmani12345100% (2)
- 1.10 Area Fill and Character - Attributes of OutputDocument35 pagini1.10 Area Fill and Character - Attributes of Outputmani12345Încă nu există evaluări
- Computer Graphics Fundamentals QuizDocument85 paginiComputer Graphics Fundamentals Quizprafulla0% (1)
- Computer Graphics Subject Practicals: Complete Projects in BSITDocument45 paginiComputer Graphics Subject Practicals: Complete Projects in BSITSayyed Salman Mehdi Mosvi100% (7)
- Computer Graphics Multimedia Notes 1Document113 paginiComputer Graphics Multimedia Notes 1bhuvanaÎncă nu există evaluări
- Back Face DetectionDocument13 paginiBack Face Detectionpalanirec100% (1)
- Multimedia Hardware & SoftwareDocument25 paginiMultimedia Hardware & SoftwareGail Widener0% (1)
- CS2401 Computer Graphics Two Marks QuestionsDocument12 paginiCS2401 Computer Graphics Two Marks QuestionsArul Prakash50% (2)
- Line Drawing AlgorithmsDocument53 paginiLine Drawing AlgorithmsSasi Tharan100% (2)
- Computer Graphics NotesDocument166 paginiComputer Graphics NotesHemanand DuraiveluÎncă nu există evaluări
- Iot Practical FileDocument21 paginiIot Practical Filetushar0% (2)
- Computer Graphics - Question BankDocument1 paginăComputer Graphics - Question BankBasant YadavÎncă nu există evaluări
- Computer Graphics and Image ProcessingDocument14 paginiComputer Graphics and Image ProcessingGuruKPO33% (3)
- MCAN201 Data Structure With Python Questions For 1st InternalDocument2 paginiMCAN201 Data Structure With Python Questions For 1st InternalDr.Krishna BhowalÎncă nu există evaluări
- DIP Unit 5 MCQDocument6 paginiDIP Unit 5 MCQSanthosh PaÎncă nu există evaluări
- Visual Programming NotesDocument0 paginiVisual Programming NotesSamuel VictorÎncă nu există evaluări
- Liang Barsky Line Clipping Algorithm ExampleDocument5 paginiLiang Barsky Line Clipping Algorithm ExampleHardik AgrawalÎncă nu există evaluări
- Computer Graphics MCQ'SDocument7 paginiComputer Graphics MCQ'SGuruKPO78% (9)
- Circle and Ellipse Drawing AlgorithmDocument4 paginiCircle and Ellipse Drawing AlgorithmNaman Goyal0% (1)
- Slide 2 - Graphics and Image Data RepresentationDocument61 paginiSlide 2 - Graphics and Image Data RepresentationDương Nguyễn100% (1)
- CS8091 Important Questions BDADocument1 paginăCS8091 Important Questions BDAvanithaÎncă nu există evaluări
- CGR CH 1Document22 paginiCGR CH 1Rupesh Patil100% (2)
- Lab Manual: 18CS3262S Data Modelling and Visualization TechniquesDocument17 paginiLab Manual: 18CS3262S Data Modelling and Visualization TechniquesSri Vallabha Sharma33% (3)
- Computer Graphics: Unit-I A Survey of Computer Graphics: Overview of Graphics Systems: VideoDocument48 paginiComputer Graphics: Unit-I A Survey of Computer Graphics: Overview of Graphics Systems: VideoRajasekharReddyGajulapaalliÎncă nu există evaluări
- 300+ TOP 3DS MAX Objective Questions and Answers 2023Document1 pagină300+ TOP 3DS MAX Objective Questions and Answers 2023safeer khanÎncă nu există evaluări
- Two Dimentional Transformation in Computer GraphicsDocument25 paginiTwo Dimentional Transformation in Computer GraphicsBokhtiar Mehedy FarsimÎncă nu există evaluări
- Raster Scan Systems ExplainedDocument18 paginiRaster Scan Systems ExplainedSantosh Jhansi100% (1)
- Web Lab Question BankDocument2 paginiWeb Lab Question Banklolman100% (1)
- Design of Absolute LoaderDocument3 paginiDesign of Absolute Loaderakbisoi160% (5)
- CG3 - Fill Area PrimitivesDocument54 paginiCG3 - Fill Area PrimitivesSameerSharma0% (1)
- Multimedia & Animation-CCS352 - CAT-1 Questions With Answer KeysDocument12 paginiMultimedia & Animation-CCS352 - CAT-1 Questions With Answer Keysragavaharish463100% (1)
- Boundary DescriptorDocument10 paginiBoundary DescriptorMcs Candra Putra100% (1)
- CG MCQsDocument25 paginiCG MCQsPrashant Mane100% (1)
- Image Processing Lab ManualDocument10 paginiImage Processing Lab ManualDeepa SÎncă nu există evaluări
- MS-DOS LINKER Combines Object Modules into Executable ProgramDocument28 paginiMS-DOS LINKER Combines Object Modules into Executable ProgramMukut Jyoti Das0% (1)
- C Programs List for Beginners in Part I & IIDocument5 paginiC Programs List for Beginners in Part I & IISrivatsa KarcheduÎncă nu există evaluări
- Arvr QBDocument5 paginiArvr QBHari DeivasigamaniÎncă nu există evaluări
- Computer Graphics MCQ Question Bank 22318Document52 paginiComputer Graphics MCQ Question Bank 22318Rupali Sardar100% (3)
- Application Development Using Python: Model Question Paper-1 With Effect From 2018-19 (CBCS Scheme)Document6 paginiApplication Development Using Python: Model Question Paper-1 With Effect From 2018-19 (CBCS Scheme)subhash100% (1)
- AI Practical 05-Greedy Best First Search ImplementationDocument19 paginiAI Practical 05-Greedy Best First Search ImplementationhokÎncă nu există evaluări
- Cs2401 Computer Graphiccs Question Bank With AnswersDocument11 paginiCs2401 Computer Graphiccs Question Bank With Answersathirayan100% (1)
- Course Title: Computer Graphics Marks: 70 Time: 3 Hrs. InstructionsDocument2 paginiCourse Title: Computer Graphics Marks: 70 Time: 3 Hrs. InstructionsNeerajÎncă nu există evaluări
- Digital Image Fundamentals MCQsDocument12 paginiDigital Image Fundamentals MCQsSanthosh PaÎncă nu există evaluări
- PPT1 - Introduction To Data StructureDocument37 paginiPPT1 - Introduction To Data StructureGuntur WibisonoÎncă nu există evaluări
- Computer Graphics& Multimedia Notes 1Document121 paginiComputer Graphics& Multimedia Notes 1RajeshKanna Rajendran89% (37)
- Filled Area Primitives: Some Scan-Line Intersections at Polygon VerticeDocument7 paginiFilled Area Primitives: Some Scan-Line Intersections at Polygon Verticeamutha dÎncă nu există evaluări
- Computer Graphics - Chapter 3 (1) - 2Document35 paginiComputer Graphics - Chapter 3 (1) - 2Sương TrầnÎncă nu există evaluări
- Chapter Three: Output PrimitivesDocument37 paginiChapter Three: Output PrimitivesaddssdfaÎncă nu există evaluări
- Computer GraphicsDocument49 paginiComputer GraphicsKarthi KeyanÎncă nu există evaluări
- NSW Health Medical Leadership Forum 02 Mar 2018 EHealth PresentationDocument36 paginiNSW Health Medical Leadership Forum 02 Mar 2018 EHealth PresentationjayanthikrishnanÎncă nu există evaluări
- Introduction To Python (Session 1)Document2 paginiIntroduction To Python (Session 1)jayanthikrishnanÎncă nu există evaluări
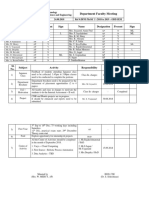
- Name Designation Present Sign Name Designation Present SignDocument2 paginiName Designation Present Sign Name Designation Present SignjayanthikrishnanÎncă nu există evaluări
- CS6703 GCC Internal2 Questionpaper PDFDocument2 paginiCS6703 GCC Internal2 Questionpaper PDFjayanthikrishnanÎncă nu există evaluări
- Agni College of Technology: Office of Examcell Internal Test-1Document2 paginiAgni College of Technology: Office of Examcell Internal Test-1jayanthikrishnanÎncă nu există evaluări
- Governance, Infrastructure and Financial ResourcesDocument22 paginiGovernance, Infrastructure and Financial ResourcesjayanthikrishnanÎncă nu există evaluări
- Ip PDFDocument2 paginiIp PDFjayanthikrishnanÎncă nu există evaluări
- Internal 2 QuestionDocument11 paginiInternal 2 QuestionjayanthikrishnanÎncă nu există evaluări
- Internal 2 QuestionDocument8 paginiInternal 2 QuestionjayanthikrishnanÎncă nu există evaluări
- Ds PDFDocument2 paginiDs PDFjayanthikrishnanÎncă nu există evaluări
- Retest 2 (INT I) Duty Chart PDFDocument1 paginăRetest 2 (INT I) Duty Chart PDFjayanthikrishnanÎncă nu există evaluări
- Name Designation Present Sign Name Designation Present SignDocument2 paginiName Designation Present Sign Name Designation Present SignjayanthikrishnanÎncă nu există evaluări
- Node Configured Strong Ip Address in Ad Hoc Networks: L.Rajeshkumar, Jeba Moses.T, M.Tech, MISTEDocument8 paginiNode Configured Strong Ip Address in Ad Hoc Networks: L.Rajeshkumar, Jeba Moses.T, M.Tech, MISTEjayanthikrishnanÎncă nu există evaluări
- CS6703 GCC Internal2 Questionpaper PDFDocument2 paginiCS6703 GCC Internal2 Questionpaper PDFjayanthikrishnanÎncă nu există evaluări
- Heat & Mass Transfer Model ExamDocument6 paginiHeat & Mass Transfer Model ExamjayanthikrishnanÎncă nu există evaluări
- Sar Ug T II Final Ver 06Document45 paginiSar Ug T II Final Ver 06Madhu ValavalaÎncă nu există evaluări
- Retest 2 (INT I) Duty ChartDocument1 paginăRetest 2 (INT I) Duty ChartjayanthikrishnanÎncă nu există evaluări
- Agni College of Technology: Criteria 5: Facultyinformation and ContributionsDocument1 paginăAgni College of Technology: Criteria 5: Facultyinformation and ContributionsjayanthikrishnanÎncă nu există evaluări
- Retest 1 Duty Chart For (INT I) PDFDocument1 paginăRetest 1 Duty Chart For (INT I) PDFjayanthikrishnanÎncă nu există evaluări
- 24.07.2018 - Minutes of The Meeting - HODs MeetingDocument9 pagini24.07.2018 - Minutes of The Meeting - HODs MeetingjayanthikrishnanÎncă nu există evaluări
- Agni College of Technology, Thalambur - 600130: Model Test Set 1Document5 paginiAgni College of Technology, Thalambur - 600130: Model Test Set 1jayanthikrishnanÎncă nu există evaluări
- Extnjul 2018Document1 paginăExtnjul 2018jayanthikrishnanÎncă nu există evaluări
- Retest 1 Duty Chart For (INT I) PDFDocument1 paginăRetest 1 Duty Chart For (INT I) PDFjayanthikrishnanÎncă nu există evaluări
- ISM Model QuestionDocument3 paginiISM Model QuestionjayanthikrishnanÎncă nu există evaluări
- 24.07.2018 - Minutes of The Meeting - HODs MeetingDocument9 pagini24.07.2018 - Minutes of The Meeting - HODs MeetingjayanthikrishnanÎncă nu există evaluări
- File 1Document189 paginiFile 1jayanthikrishnanÎncă nu există evaluări
- Programme DetailsDocument2 paginiProgramme DetailsjayanthikrishnanÎncă nu există evaluări
- Duty Chart IT-1 AY2018-2019 Odd SemDocument4 paginiDuty Chart IT-1 AY2018-2019 Odd SemjayanthikrishnanÎncă nu există evaluări
- Retest 1 Duty Chart For (INT I)Document1 paginăRetest 1 Duty Chart For (INT I)jayanthikrishnanÎncă nu există evaluări
- File 1Document189 paginiFile 1jayanthikrishnanÎncă nu există evaluări
- Quality Management - QuestionDocument4 paginiQuality Management - QuestionLawzy Elsadig SeddigÎncă nu există evaluări
- Food Science, Technology & Nutitions - Woodhead - FoodDocument64 paginiFood Science, Technology & Nutitions - Woodhead - FoodEduardo EstradaÎncă nu există evaluări
- Examples of IELTS Speaking Part 1 QuestionsDocument15 paginiExamples of IELTS Speaking Part 1 QuestionsThanh TrầnÎncă nu există evaluări
- Expt 1 Yarn Formation (Sherley Trash Analyser)Document7 paginiExpt 1 Yarn Formation (Sherley Trash Analyser)Yashdeep Sharma0% (1)
- Rubik Clock Solution 1Document2 paginiRubik Clock Solution 1Ionel PaunÎncă nu există evaluări
- Asian Studies For Filipinos The Philippines in The Asian CenturyDocument15 paginiAsian Studies For Filipinos The Philippines in The Asian CenturyGlaizza QuintonÎncă nu există evaluări
- GBM Auction Versus English Auction A Large-Scale Empirical Study - E. Bessire, K. Elhadji Tchiambou (October 2021)Document18 paginiGBM Auction Versus English Auction A Large-Scale Empirical Study - E. Bessire, K. Elhadji Tchiambou (October 2021)Guillaume GonnaudÎncă nu există evaluări
- Journal Sleep Walking 1Document7 paginiJournal Sleep Walking 1Kita SemuaÎncă nu există evaluări
- Echt Er Nacht 2014Document8 paginiEcht Er Nacht 2014JamesÎncă nu există evaluări
- The Secret Language of AttractionDocument278 paginiThe Secret Language of Attractionsandrojairdhonre89% (93)
- Cloud Security Training and Awareness Programs For OrganizationsDocument2 paginiCloud Security Training and Awareness Programs For OrganizationsdeeÎncă nu există evaluări
- C++ NotesDocument129 paginiC++ NotesNikhil Kant Saxena100% (4)
- Administrations whose CoCs are accepted for CECDocument1 paginăAdministrations whose CoCs are accepted for CECGonçalo CruzeiroÎncă nu există evaluări
- Horizontal Vertical MarketDocument4 paginiHorizontal Vertical MarketVikasÎncă nu există evaluări
- 740 (Q50, V40, Awa 4Document10 pagini740 (Q50, V40, Awa 4rawat2583Încă nu există evaluări
- AMB4520R0v06: Antenna SpecificationsDocument2 paginiAMB4520R0v06: Antenna SpecificationsЕвгений ГрязевÎncă nu există evaluări
- The Clàsh The 0nly Band That MatteredDocument255 paginiThe Clàsh The 0nly Band That MatteredNikos VaxevanidisÎncă nu există evaluări
- Project Report VajDocument15 paginiProject Report VajTamil SelvanÎncă nu există evaluări
- Mini Centre CatalogDocument26 paginiMini Centre CatalogJohn EarleyÎncă nu există evaluări
- Explanation of Four Ahadeeth From Imaam Al-Bukhaaree's Al-Adab-Ul-MufradDocument4 paginiExplanation of Four Ahadeeth From Imaam Al-Bukhaaree's Al-Adab-Ul-MufradMountainofknowledgeÎncă nu există evaluări
- 2.7.3 Lab Use Steganography To Hide Data Answer KeyDocument3 pagini2.7.3 Lab Use Steganography To Hide Data Answer KeyVivek GaonkarÎncă nu există evaluări
- NewTrendsInLeadershipandManagement ArikkokDocument32 paginiNewTrendsInLeadershipandManagement Arikkoksocofem288Încă nu există evaluări
- 1651 EE-ES-2019-1015-R0 Load Flow PQ Capability (ENG)Document62 pagini1651 EE-ES-2019-1015-R0 Load Flow PQ Capability (ENG)Alfonso GonzálezÎncă nu există evaluări
- Chapter 4. Quality Service and Standards TrainingDocument40 paginiChapter 4. Quality Service and Standards TrainingJia Mae Sapico ApantiÎncă nu există evaluări
- Ownership and Governance of State Owned Enterprises A Compendium of National Practices 2021Document104 paginiOwnership and Governance of State Owned Enterprises A Compendium of National Practices 2021Ary Surya PurnamaÎncă nu există evaluări
- Current Developments in Testing Item Response Theory (IRT) : Prepared byDocument32 paginiCurrent Developments in Testing Item Response Theory (IRT) : Prepared byMalar VengadesÎncă nu există evaluări
- Amna Hameed: ObjectiveDocument2 paginiAmna Hameed: ObjectiveSabrina GandapurÎncă nu există evaluări
- Silicone Bonding BrochureDocument4 paginiSilicone Bonding BrochureAmir ShahzadÎncă nu există evaluări
- Salford Care Organisation Job Description & Person SpecificationDocument14 paginiSalford Care Organisation Job Description & Person SpecificationAyesha EhsanÎncă nu există evaluări
- Jeremy Hughes ReviewDocument5 paginiJeremy Hughes ReviewgracecavÎncă nu există evaluări