S-ar putea să vă placă și
- Manual de Servicio - Discover 125 STDocument50 paginiManual de Servicio - Discover 125 STCésar Augusto Luna Victoria100% (5)
- Problema Tanque HemisfericoDocument5 paginiProblema Tanque Hemisfericojohan280609Încă nu există evaluări
- Ficha de Actividades Fisica 6toDocument97 paginiFicha de Actividades Fisica 6toCarmen Valdez33% (3)
- Parcial 2. Simulacro Distribuciones de Carga y Ley de GaussDocument1 paginăParcial 2. Simulacro Distribuciones de Carga y Ley de GaussFabiola RamírezÎncă nu există evaluări
- Desarme y Reglaje Carburador SOLEX Citroen 2CVDocument5 paginiDesarme y Reglaje Carburador SOLEX Citroen 2CVSebastian Machuca100% (1)
- La Viga de Galileo GalileiDocument10 paginiLa Viga de Galileo GalileiManuel Mosqueda100% (1)
- Laboratorio Talleres VS 2019Document3 paginiLaboratorio Talleres VS 2019ICBÎncă nu există evaluări
- Diseño Plástico o de Resistencia UltimaDocument20 paginiDiseño Plástico o de Resistencia UltimaHenry CYÎncă nu există evaluări
- Tema 7 Esfuerzo Combinados PDFDocument32 paginiTema 7 Esfuerzo Combinados PDFFernando SolisÎncă nu există evaluări
- Proyecto de ElectricidadDocument62 paginiProyecto de ElectricidadChristian MoralesÎncă nu există evaluări
- Problemas FlexionDocument4 paginiProblemas FlexionJesus Manzano MartinezÎncă nu există evaluări
- T3 DMAQ EjercicioDocument3 paginiT3 DMAQ Ejerciciohector papas100% (1)
- Propiedades Elásticas de Los MaterialesDocument11 paginiPropiedades Elásticas de Los MaterialesCarlos Piña100% (1)
- Ejemplos de Ley de GaussDocument8 paginiEjemplos de Ley de GaussLaura RangelÎncă nu există evaluări
- Divergencia RotacionalDocument3 paginiDivergencia RotacionalAntony Giancarlo Yataco PioÎncă nu există evaluări
- Algunos Tensores de Segundo OrdenDocument19 paginiAlgunos Tensores de Segundo OrdenAMYNNXXXXÎncă nu există evaluări
- Cap 16 CalorDocument20 paginiCap 16 CalorAnonymous jt1gNLfÎncă nu există evaluări
- Practica 1Document13 paginiPractica 1Eduardo NietoÎncă nu există evaluări
- Parcial 4 Yoander NavarroDocument23 paginiParcial 4 Yoander NavarroYoander NavarroÎncă nu există evaluări
- Ejercicios Resueltos Huang Grupo 091Document20 paginiEjercicios Resueltos Huang Grupo 091Luis Miguel Mendoza GarciaÎncă nu există evaluări
- Talleres de Física Diver Jesus Janer FavianDocument28 paginiTalleres de Física Diver Jesus Janer FavianDiver LopezÎncă nu există evaluări
- Ejercicios de Sistemas Vibratorios Con y Sin AmortiguaciónDocument4 paginiEjercicios de Sistemas Vibratorios Con y Sin AmortiguaciónJosé Alejandro Vargas0% (1)
- Formas Funcionales de Los Coeficientes de Friccion y de ConveccionDocument6 paginiFormas Funcionales de Los Coeficientes de Friccion y de ConveccionJonathan Javier Salazar ValladaresÎncă nu există evaluări
- 06 - Trabajo Practico #1Document11 pagini06 - Trabajo Practico #1chuave892Încă nu există evaluări
- 2 Cables Suspendidos - GDocument3 pagini2 Cables Suspendidos - GAnonimus290599Încă nu există evaluări
- Guía de Ejercicios - Ecuaciones de MaxwellDocument3 paginiGuía de Ejercicios - Ecuaciones de MaxwellFrancisco MuñozÎncă nu există evaluări
- Capitulo 1 Propiedades de Los FluidosDocument38 paginiCapitulo 1 Propiedades de Los FluidosCR CrÎncă nu există evaluări
- Ecuaciones Constitutivas Mecanica de FluidosDocument12 paginiEcuaciones Constitutivas Mecanica de Fluidosemd1966Încă nu există evaluări
- Miembros A TensiónDocument34 paginiMiembros A TensiónAdriana NogueraÎncă nu există evaluări
- Universidad de Las Fuerzas Armadas - Espe: 9547 CmecnDocument10 paginiUniversidad de Las Fuerzas Armadas - Espe: 9547 CmecnANTHONY VINICIO PANTOJA GARCIAÎncă nu există evaluări
- Movimiento de RodaduraDocument8 paginiMovimiento de RodadurathordeasgardÎncă nu există evaluări
- Capa LimiteDocument5 paginiCapa LimiteAnonymous 4OQePEÎncă nu există evaluări
- 08 - Capacitancia Geométrica - 01-2013Document5 pagini08 - Capacitancia Geométrica - 01-2013Leivys David Campo PeñateÎncă nu există evaluări
- Laboratorio Fluidos (Venturimetro)Document11 paginiLaboratorio Fluidos (Venturimetro)xanielcdaÎncă nu există evaluări
- Tarea Fisica II Zemansky 14va VirtualDocument1 paginăTarea Fisica II Zemansky 14va VirtualSaul Salas GutierrezÎncă nu există evaluări
- Solución Ejercicios Pérdidas de Energía: Libro Juan G. Saldarraiaga VDocument3 paginiSolución Ejercicios Pérdidas de Energía: Libro Juan G. Saldarraiaga VCristian Pachon CorredorÎncă nu există evaluări
- Parcial 01 UNT 2021 IDocument4 paginiParcial 01 UNT 2021 IPaul Jeampier Otiniano VillanuevaÎncă nu există evaluări
- Energía en Ondas EstacionariasDocument2 paginiEnergía en Ondas EstacionariasJoaquin Novoa67% (3)
- Taller ResistenciaDocument14 paginiTaller ResistenciaAndres Felipe Losada EstradaÎncă nu există evaluări
- Circulo de MorhDocument17 paginiCirculo de MorhMirianÎncă nu există evaluări
- 04 y 05 - EquilibrioDocument22 pagini04 y 05 - EquilibriopercyÎncă nu există evaluări
- Vibracion Libre de Sistemas de Un GradoDocument17 paginiVibracion Libre de Sistemas de Un GradoVickman PenagosÎncă nu există evaluări
- Ejercicios Resueltos Beer Grupo 03Document40 paginiEjercicios Resueltos Beer Grupo 03Gerardo AriasÎncă nu există evaluări
- Ejercicios Resueltos Vasquez vERADocument22 paginiEjercicios Resueltos Vasquez vERAEstrella Quispe Meneses100% (1)
- Equilibrio de Un Cuerpo Rígido Investigación FormativaDocument6 paginiEquilibrio de Un Cuerpo Rígido Investigación FormativaNicolas Alvitres GrundyÎncă nu există evaluări
- Propiedades Del Concreto Reforzado 2Document1 paginăPropiedades Del Concreto Reforzado 2SVGC870Încă nu există evaluări
- Taller 4.1 Trabajo y Energía PDFDocument1 paginăTaller 4.1 Trabajo y Energía PDFAnaMilenaNobleÎncă nu există evaluări
- Clase 2Document13 paginiClase 2Alvarez AmeliaÎncă nu există evaluări
- Problemas Resueltos MASDocument20 paginiProblemas Resueltos MASgarfacio30Încă nu există evaluări
- Liquidos Contenidos en Recipientes Que Se Mueven Con Aceleración Lineal ConstanteDocument13 paginiLiquidos Contenidos en Recipientes Que Se Mueven Con Aceleración Lineal Constantecristhofer0% (1)
- Pract. de Lab - No.1. Mec. FluidosDocument14 paginiPract. de Lab - No.1. Mec. FluidosBRYAN LOPEZ GARCIAÎncă nu există evaluări
- Primera Prueba de Ingenieri - A de Materiales1Document1 paginăPrimera Prueba de Ingenieri - A de Materiales1Gonzalo Martinez PeñaÎncă nu există evaluări
- ESFUERZODocument4 paginiESFUERZOJosué ZNÎncă nu există evaluări
- Sistemas Mecanicos Lineales de Dos Grados de LibertadDocument8 paginiSistemas Mecanicos Lineales de Dos Grados de LibertadOfferOfKnowÎncă nu există evaluări
- Cinética Del Cuerpo Rígido FinalDocument37 paginiCinética Del Cuerpo Rígido FinalYatniel BjÎncă nu există evaluări
- Grupo 3 - Energía Cinética de Un Sistema de ParticulasDocument38 paginiGrupo 3 - Energía Cinética de Un Sistema de ParticulasStarPlatinum556Încă nu există evaluări
- Esfuerzo de TraccionDocument20 paginiEsfuerzo de TraccionrobertoÎncă nu există evaluări
- Tema 2Document40 paginiTema 2lalaÎncă nu există evaluări
- Ejercicios Resueltos Estructuras Cristalinas 2015Document9 paginiEjercicios Resueltos Estructuras Cristalinas 2015Lucas Flamarique50% (2)
- Capitulo 12Document9 paginiCapitulo 12Esja ModaEsjaÎncă nu există evaluări
- Clase #18Document8 paginiClase #18Sandra ZabalaÎncă nu există evaluări
- Sistema de Resorte y Masa - Movimiento ForzadoDocument14 paginiSistema de Resorte y Masa - Movimiento ForzadoDagmar ValenciaÎncă nu există evaluări
- Talle Eje 4 Calculo IntegralDocument14 paginiTalle Eje 4 Calculo Integralluis fernandezÎncă nu există evaluări
- Presentación1 PulverizadoraDocument7 paginiPresentación1 PulverizadoraSergio QuinteroÎncă nu există evaluări
- Perdidas de Un Motor de Combustion InternaDocument9 paginiPerdidas de Un Motor de Combustion InternaSergio QuinteroÎncă nu există evaluări
- Informe de SOLIDWORKS FloXpress NewDocument3 paginiInforme de SOLIDWORKS FloXpress NewSergio QuinteroÎncă nu există evaluări
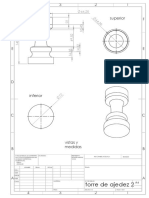
- Torre de AjedrezDocument1 paginăTorre de AjedrezSergio QuinteroÎncă nu există evaluări
- Control Ingreso ArduinoDocument24 paginiControl Ingreso ArduinoSergio QuinteroÎncă nu există evaluări
- Informe de Lab Electrotecnia Correo PDFDocument9 paginiInforme de Lab Electrotecnia Correo PDFSergio QuinteroÎncă nu există evaluări
- 6 Problemas Resueltos Cinemática de Partícula en Componente Cartesiana.Document17 pagini6 Problemas Resueltos Cinemática de Partícula en Componente Cartesiana.Sergio QuinteroÎncă nu există evaluări
- Caso GerencialDocument29 paginiCaso GerencialGloria Arias OrezanoÎncă nu există evaluări
- Dibujo Polea - Búsqueda de GoogleDocument1 paginăDibujo Polea - Búsqueda de Googlepgq2vjc4qkÎncă nu există evaluări
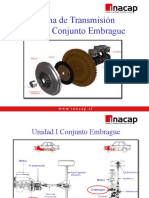
- Presentacion Conjunto de EmbragueDocument83 paginiPresentacion Conjunto de EmbragueYanh Nicolas Castillo DiazÎncă nu există evaluări
- PD TuberiasDocument3 paginiPD TuberiasYakeli ApazaÎncă nu există evaluări
- Laboratorio de Desorcion Gaseosa UNIDocument27 paginiLaboratorio de Desorcion Gaseosa UNIJUAN MANUEL SILVA CORONADOÎncă nu există evaluări
- Informe 8 FisicaDocument2 paginiInforme 8 FisicaCristian Daniel Ramos MorenoÎncă nu există evaluări
- Actividad Evaluativa (Física I) Eje 2Document8 paginiActividad Evaluativa (Física I) Eje 2Nicolás LemusÎncă nu există evaluări
- Motor StirlingDocument5 paginiMotor StirlingAndres RamirezÎncă nu există evaluări
- Taller Segundo Corte Analisis EstructuralDocument12 paginiTaller Segundo Corte Analisis EstructuralJohn Javier Pajaro LastraÎncă nu există evaluări
- Motores de Combustion Interna DieselDocument20 paginiMotores de Combustion Interna DieselRolandoÎncă nu există evaluări
- Actividades Dinámica IDocument2 paginiActividades Dinámica IdeltinoÎncă nu există evaluări
- Usos y Aplicaciones de Los Compresores de AireDocument3 paginiUsos y Aplicaciones de Los Compresores de AireNorman Jheison MansillaÎncă nu există evaluări
- Bernoulli 2019 2.0Document12 paginiBernoulli 2019 2.0Mario SisaÎncă nu există evaluări
- Bonba Sentrifuga Mecanicos y ElectricosDocument22 paginiBonba Sentrifuga Mecanicos y ElectricososcarÎncă nu există evaluări
- Informe de UltrasonidoDocument10 paginiInforme de UltrasonidoSamuel ChoquecotaÎncă nu există evaluări
- Brochure Corgma PeruDocument5 paginiBrochure Corgma PeruMARINO ESTEBAN RAMIREZ SANTILLANÎncă nu există evaluări
- Proyecto Mec 252Document8 paginiProyecto Mec 252Edwin Calderon SalinasÎncă nu există evaluări
- Informe de Laboratorio III Fluidos y Maquinas HidraulicasDocument29 paginiInforme de Laboratorio III Fluidos y Maquinas HidraulicasAxel Daniel Salamanca AvellaÎncă nu există evaluări
- Informe EmbragueDocument8 paginiInforme EmbragueAlexander RicoÎncă nu există evaluări
- Condensadoras FLR - Manual UsuarioDocument16 paginiCondensadoras FLR - Manual UsuarioPilar TovarÎncă nu există evaluări
- Diseño Del GussetDocument16 paginiDiseño Del GussetAlan FredesÎncă nu există evaluări
- Afp M8 M9 TDSDocument2 paginiAfp M8 M9 TDSandersonsdsÎncă nu există evaluări
- PistonesDocument6 paginiPistonesFredy AyalaÎncă nu există evaluări
- Informe Tubo de Kundt YNDIRADocument7 paginiInforme Tubo de Kundt YNDIRAGuillermo PerezÎncă nu există evaluări
- Resumen CojinetesDocument12 paginiResumen CojinetesRobinson Quinatoa50% (2)
- M.R.U - Informe de LaboratorioDocument5 paginiM.R.U - Informe de Laboratoriomichael9845Încă nu există evaluări
- Tubos Cuadrados y Rectangulares A500 PDFDocument1 paginăTubos Cuadrados y Rectangulares A500 PDFElvis Lionel FLORES ROCAÎncă nu există evaluări