S-ar putea să vă placă și
- 5 Spd. Automatic Transmission 01VDocument870 pagini5 Spd. Automatic Transmission 01VNP100% (3)
- ENGR 2422 Engineering Mathematics 2 Brief Notes On Chapter 1 1.1 Lines and PlanesDocument10 paginiENGR 2422 Engineering Mathematics 2 Brief Notes On Chapter 1 1.1 Lines and PlanesbihanbaÎncă nu există evaluări
- 6-Dynamics - Notes - Curvilinear Motion (Polar) - 2019 - AB - HFDocument16 pagini6-Dynamics - Notes - Curvilinear Motion (Polar) - 2019 - AB - HFAyesha Maher khanÎncă nu există evaluări
- ME101 Lecture24 KD PDFDocument21 paginiME101 Lecture24 KD PDFMary EuniceÎncă nu există evaluări
- 4 Polar Coordinate SystemDocument5 pagini4 Polar Coordinate SystemAlone EulerÎncă nu există evaluări
- ParticleDynamics Class Part1Document16 paginiParticleDynamics Class Part1Rohan Bhupen Shah ae22b052Încă nu există evaluări
- Lecture2 SBasu PDFDocument20 paginiLecture2 SBasu PDFHimashree BhattacharyyaÎncă nu există evaluări
- VelocityDocument16 paginiVelocityhimanshu10092004Încă nu există evaluări
- Chapter 2.5 - Curvilinear Motion - Cylindrical Component - StudentversionDocument10 paginiChapter 2.5 - Curvilinear Motion - Cylindrical Component - StudentversionAmirulHanif AlyahyaÎncă nu există evaluări
- CurvilinearDocument18 paginiCurvilinearchirag gowdaÎncă nu există evaluări
- Lecture 08Document8 paginiLecture 08habboÎncă nu există evaluări
- Peristaltic Flows in EndoscopeDocument63 paginiPeristaltic Flows in EndoscopesnqauÎncă nu există evaluări
- Wave FN A SDocument5 paginiWave FN A SQwertyÎncă nu există evaluări
- Lecture 3 Classical Mechanics EP204Document16 paginiLecture 3 Classical Mechanics EP204Niamh BrowneÎncă nu există evaluări
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument35 paginiKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraÎncă nu există evaluări
- Circular MotionDocument3 paginiCircular Motiongokulkrishna2k7Încă nu există evaluări
- Coriolis - It's All Maths' Fault-Eng - ItaDocument8 paginiCoriolis - It's All Maths' Fault-Eng - ItaLeonardo RubinoÎncă nu există evaluări
- RadialDocument44 paginiRadialYina BarmanÎncă nu există evaluări
- Transport Phenomena - 2-3 - Vector and Tensor 2 and CoordinatesDocument22 paginiTransport Phenomena - 2-3 - Vector and Tensor 2 and CoordinatesHareritamÎncă nu există evaluări
- Lecture 2Document7 paginiLecture 2prashantÎncă nu există evaluări
- (B) Velocity and Acceleration in Polar CoordinateDocument2 pagini(B) Velocity and Acceleration in Polar CoordinatePallav TiwariÎncă nu există evaluări
- (B) Velocity and Acceleration in Polar CoordinateDocument2 pagini(B) Velocity and Acceleration in Polar CoordinateAkshay SharmaÎncă nu există evaluări
- Dynamics of Machinery: Turning Moment Diagrams - FlywheelsDocument50 paginiDynamics of Machinery: Turning Moment Diagrams - FlywheelsKoushik sai ThirupathiÎncă nu există evaluări
- RotationDocument29 paginiRotationVincent VetterÎncă nu există evaluări
- Capillary ViscometerDocument4 paginiCapillary ViscometerBushra ShaukatÎncă nu există evaluări
- Mechanics Units 1 and 2 BookletDocument122 paginiMechanics Units 1 and 2 BookletDavid100% (1)
- Rotation by ComponentsDocument4 paginiRotation by Componentstarek mahmoudÎncă nu există evaluări
- Lec 6-13 Plane Curvilinear MotionDocument76 paginiLec 6-13 Plane Curvilinear MotionSaqib SherÎncă nu există evaluări
- Lecture L5 - Other Coordinate Systems: Polar Coordinates (r − θ)Document13 paginiLecture L5 - Other Coordinate Systems: Polar Coordinates (r − θ)vasudeo_eeÎncă nu există evaluări
- Lec 10Document4 paginiLec 10RKD CinemaÎncă nu există evaluări
- Kinematics of Rigid Bodies Kinematics of Rigid Bodies: Rotation (Motion of Point P) Rotation (Motion of Point P)Document4 paginiKinematics of Rigid Bodies Kinematics of Rigid Bodies: Rotation (Motion of Point P) Rotation (Motion of Point P)DanielMalpicaCuevasÎncă nu există evaluări
- W10 Kinematics of A Particle: Kns1633 Engineering Mechanics Semester 1 2011-2012 MR Abdul Azim AbdullahDocument59 paginiW10 Kinematics of A Particle: Kns1633 Engineering Mechanics Semester 1 2011-2012 MR Abdul Azim AbdullahSek Chin JiÎncă nu există evaluări
- To Solid State Physics: Prof. Igor Shvets Ivchvets@tcd - IeDocument39 paginiTo Solid State Physics: Prof. Igor Shvets Ivchvets@tcd - IeThiago Boimer CorreiaÎncă nu există evaluări
- Circular Motion Study MaterialDocument31 paginiCircular Motion Study MaterialSuchay SawardekarÎncă nu există evaluări
- Electricity Hong Kong NotesDocument114 paginiElectricity Hong Kong NotesArlin BirkbyÎncă nu există evaluări
- Modul 4: Pendahuluan Analisis Vektor Sesi 1Document8 paginiModul 4: Pendahuluan Analisis Vektor Sesi 1anon_42735107Încă nu există evaluări
- Lecture 4: Electric Potential/Voltage (Cont.) and CapacitorsDocument4 paginiLecture 4: Electric Potential/Voltage (Cont.) and CapacitorsAmir YonanÎncă nu există evaluări
- Polar CoordinatesDocument3 paginiPolar Coordinatesvxa_victorÎncă nu există evaluări
- Solution To HW ProblemsDocument4 paginiSolution To HW ProblemsAditya PrasadÎncă nu există evaluări
- 3-Circular MotionDocument19 pagini3-Circular MotionMak YabuÎncă nu există evaluări
- (N) Other Image ProblemDocument2 pagini(N) Other Image ProblemMohsin ZakiÎncă nu există evaluări
- Electrostatic FieldsDocument40 paginiElectrostatic FieldscharanÎncă nu există evaluări
- Peristaltic Flow With An EndoscopeDocument63 paginiPeristaltic Flow With An EndoscopesnqauÎncă nu există evaluări
- Circular MotionDocument23 paginiCircular MotionAnkit PatidarÎncă nu există evaluări
- 2 and 2 U RDR Ry XV U M M 2 P RDR: 2 R y y y X y Ry R RyDocument1 pagină2 and 2 U RDR Ry XV U M M 2 P RDR: 2 R y y y X y Ry R RySantosa Edy WibowoÎncă nu există evaluări
- Ch07 KinematicsDocument17 paginiCh07 KinematicsKhansa RazzaqÎncă nu există evaluări
- Fluids - Lecture 16 Notes: VortexDocument4 paginiFluids - Lecture 16 Notes: VortexSunny DesharÎncă nu există evaluări
- Ch4 Basic Vortex DynamicsDocument25 paginiCh4 Basic Vortex Dynamicsd92543013100% (1)
- Relative Velocity MethodDocument97 paginiRelative Velocity MethodKiran ThunuguntlaÎncă nu există evaluări
- PH-525 (Spring 2019) Tutorial Sheet-4Document2 paginiPH-525 (Spring 2019) Tutorial Sheet-4DEBANJAN ADHIKARIÎncă nu există evaluări
- Cylindrical Coordinate System FDocument14 paginiCylindrical Coordinate System FRajeshÎncă nu există evaluări
- PHYS500 Chapter01Document25 paginiPHYS500 Chapter01Levis CivitaÎncă nu există evaluări
- 4.1 Thick Cylinder and DisksDocument7 pagini4.1 Thick Cylinder and DisksMohamad Amir HaziqÎncă nu există evaluări
- Example-Transpiration Cooling PDFDocument10 paginiExample-Transpiration Cooling PDFBerkcan ArslanÎncă nu există evaluări
- Tangential FlowDocument4 paginiTangential FlowFernandoÎncă nu există evaluări
- Class 11 Physics Most Important DerivationsDocument67 paginiClass 11 Physics Most Important Derivationsdhrumil100% (13)
- ABE2023-Sessions - Radial Equilibrium and Free Vortex DesignDocument24 paginiABE2023-Sessions - Radial Equilibrium and Free Vortex Designaccplus194Încă nu există evaluări
- Mth-301 File Lec 23-45 by Orange MonkeyDocument23 paginiMth-301 File Lec 23-45 by Orange MonkeyawaisesÎncă nu există evaluări
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99De la EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Încă nu există evaluări
- Bem Code of Professional ConductDocument6 paginiBem Code of Professional ConductShaktivell LetchumananÎncă nu există evaluări
- Panels For Wrapping Structures On Piping SystemDocument4 paginiPanels For Wrapping Structures On Piping SystemShaktivell LetchumananÎncă nu există evaluări
- Air Conditioning Systems Experiment: ProposalDocument16 paginiAir Conditioning Systems Experiment: ProposalShaktivell Letchumanan100% (1)
- Alif Izzani Bin Zainol Adnan (GD190044)Document2 paginiAlif Izzani Bin Zainol Adnan (GD190044)Shaktivell LetchumananÎncă nu există evaluări
- Johor Sultan Pledges RM1m For Pasir Gudang CrisisDocument4 paginiJohor Sultan Pledges RM1m For Pasir Gudang CrisisShaktivell LetchumananÎncă nu există evaluări
- Alif Izzani Bin Zainol Adnan (GD190044)Document2 paginiAlif Izzani Bin Zainol Adnan (GD190044)Shaktivell LetchumananÎncă nu există evaluări
- Report Front Cover-Sains BahanDocument1 paginăReport Front Cover-Sains BahanShaktivell LetchumananÎncă nu există evaluări
- Shaktivell M.letchumanan Dd160012 ReportDocument56 paginiShaktivell M.letchumanan Dd160012 ReportShaktivell LetchumananÎncă nu există evaluări
- 02 Code of EthicsDocument20 pagini02 Code of EthicsShaktivell LetchumananÎncă nu există evaluări
- Objective TreeDocument1 paginăObjective TreeShaktivell LetchumananÎncă nu există evaluări
- Lecture Module 2 - Matrix AlgebraDocument42 paginiLecture Module 2 - Matrix AlgebraShaktivell LetchumananÎncă nu există evaluări
- Chap 5 - Internal Combustion EngineDocument61 paginiChap 5 - Internal Combustion EngineShaktivell LetchumananÎncă nu există evaluări
- Program Details, Tentaive Program and Job DescriptionDocument2 paginiProgram Details, Tentaive Program and Job DescriptionShaktivell LetchumananÎncă nu există evaluări
- CoalDocument53 paginiCoalghoshtapan4321Încă nu există evaluări
- Ch6 - MixturesDocument63 paginiCh6 - MixturesShaktivell Letchumanan100% (1)
- 1.0 Product Tree DiagramDocument3 pagini1.0 Product Tree DiagramShaktivell LetchumananÎncă nu există evaluări
- Maths PosterDocument1 paginăMaths PosterShaktivell LetchumananÎncă nu există evaluări
- Ch3 - CompressorsDocument48 paginiCh3 - CompressorsShaktivell Letchumanan100% (1)
- Ch6 - MixturesDocument63 paginiCh6 - MixturesShaktivell Letchumanan100% (1)
- Ch2 - Gas TurbinesDocument37 paginiCh2 - Gas TurbinesShaktivell Letchumanan100% (1)
- Chap 4 Refrigeration NewDocument52 paginiChap 4 Refrigeration NewShaktivell LetchumananÎncă nu există evaluări
- Chap 4 Refrigeration NewDocument52 paginiChap 4 Refrigeration NewShaktivell LetchumananÎncă nu există evaluări
- Chap 5 - Internal Combustion EngineDocument61 paginiChap 5 - Internal Combustion EngineShaktivell LetchumananÎncă nu există evaluări
- Format PhysicsDocument1 paginăFormat PhysicsShaktivell LetchumananÎncă nu există evaluări
- Ch6 - MixturesDocument63 paginiCh6 - MixturesShaktivell Letchumanan100% (1)
- Assignment9 Solutions PDFDocument5 paginiAssignment9 Solutions PDFsyafiqsssÎncă nu există evaluări
- Ch1 - Steam Power PlantsDocument58 paginiCh1 - Steam Power PlantsShaktivell Letchumanan100% (1)
- Chpter3 Impulse&MomentumDocument45 paginiChpter3 Impulse&MomentumShaktivell LetchumananÎncă nu există evaluări
- Chpter3 Force AccelerationDocument25 paginiChpter3 Force AccelerationAnonymous rpcAOpÎncă nu există evaluări
- Dynamics: BDA 20303 SEMESTER 1 SESSION 2017/2018 By: Khairulnizam NgadimonDocument22 paginiDynamics: BDA 20303 SEMESTER 1 SESSION 2017/2018 By: Khairulnizam NgadimonShaktivell LetchumananÎncă nu există evaluări
- Mfaf BK: ScopeDocument23 paginiMfaf BK: ScopesbalajimÎncă nu există evaluări
- States of Matter - Handwritten Notes - Yakeen 2.0 2024 (Alpha)Document28 paginiStates of Matter - Handwritten Notes - Yakeen 2.0 2024 (Alpha)King KingÎncă nu există evaluări
- Irjet - Speed Breaker Power Generation PDFDocument7 paginiIrjet - Speed Breaker Power Generation PDFJohn Jeren DawinanÎncă nu există evaluări
- Correlation of Bendability of Materials With Their Tensile Properties Datsko Bab4480.0001.001Document21 paginiCorrelation of Bendability of Materials With Their Tensile Properties Datsko Bab4480.0001.001lram70Încă nu există evaluări
- Serie 60814Document2 paginiSerie 60814Jesus LugoÎncă nu există evaluări
- 01 Excelon FiltersDocument16 pagini01 Excelon Filtersalex_alfonso9407Încă nu există evaluări
- Stess Elasticity Prof - Dr.hani Aziz AmeenDocument53 paginiStess Elasticity Prof - Dr.hani Aziz AmeenHani Aziz AmeenÎncă nu există evaluări
- Geared Coupling Manual PDFDocument5 paginiGeared Coupling Manual PDFSatÎncă nu există evaluări
- Forces, Pressure & Density 23Document34 paginiForces, Pressure & Density 23hijabÎncă nu există evaluări
- HTD 250 En-ItDocument60 paginiHTD 250 En-ItbrasgÎncă nu există evaluări
- 1.6 66 77 2.0 105 110 135 KW TDI CR EngineDocument397 pagini1.6 66 77 2.0 105 110 135 KW TDI CR EngineRSTÎncă nu există evaluări
- Gabion SlopeStabilityDocument30 paginiGabion SlopeStabilityverzana100% (2)
- HRY Microproject GP 1Document22 paginiHRY Microproject GP 1SHUBHAM PANHALKARÎncă nu există evaluări
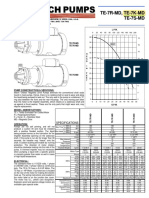
- Manual March Te-7k-MdDocument2 paginiManual March Te-7k-MdjoseÎncă nu există evaluări
- TIEIG 2023 - Twin Washers & Disc SpringsDocument24 paginiTIEIG 2023 - Twin Washers & Disc SpringsHülya Kula ÇİÇEKÇİÎncă nu există evaluări
- Dbatu Scheme - New & OldDocument9 paginiDbatu Scheme - New & OldDeepak BhopeÎncă nu există evaluări
- Materials Today: Proceedings: Chirag D. Bhatt, Mukesh Nadarajan, R. Balaji, Isukapalli Rohith, Ashish SelokarDocument7 paginiMaterials Today: Proceedings: Chirag D. Bhatt, Mukesh Nadarajan, R. Balaji, Isukapalli Rohith, Ashish SelokarRahulJNairÎncă nu există evaluări
- O&m BW211 BW212Document124 paginiO&m BW211 BW212Ricardo Portal70% (10)
- Ignition SystemDocument51 paginiIgnition SystemEyob TeklemariamÎncă nu există evaluări
- JD - Field Service EngineerDocument2 paginiJD - Field Service EngineerRajesh PotluriÎncă nu există evaluări
- Inplant Training Presentation Aniket Shinde 151Document17 paginiInplant Training Presentation Aniket Shinde 151ajayÎncă nu există evaluări
- Lecture11c - Basic Gaslift Sec 3 - Opening and Closing and TRO Pressure CalculationDocument36 paginiLecture11c - Basic Gaslift Sec 3 - Opening and Closing and TRO Pressure Calculationreborn2100% (4)
- Project Name: Xflow Local Protection Water Mist System Area Reference: Main EngineDocument5 paginiProject Name: Xflow Local Protection Water Mist System Area Reference: Main EngineAlexDorÎncă nu există evaluări
- Flow Serve PDFDocument26 paginiFlow Serve PDFTushar LanjekarÎncă nu există evaluări
- Catalogo Completo SewDocument110 paginiCatalogo Completo SewEduardo MaggiÎncă nu există evaluări
- Fluidic Muscle1Document39 paginiFluidic Muscle1alexanderfortis8628Încă nu există evaluări
- Scania: Gearbox ModelsDocument4 paginiScania: Gearbox ModelsWilliam BernardinoÎncă nu există evaluări
- Aluminum Crane Systems 1110701Document32 paginiAluminum Crane Systems 1110701aidixon CAD designÎncă nu există evaluări
- 3 Engine Lubrication System: 3.1 GeneralDocument2 pagini3 Engine Lubrication System: 3.1 GeneralABDAN MUGHNI SYAFA'ATÎncă nu există evaluări