S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Carrier VRF PDFDocument12 paginiCarrier VRF PDFThếSơnNguyễnÎncă nu există evaluări
- Irc 6-2016Document107 paginiIrc 6-2016Manvendra Nigam100% (26)
- DJANGO Manual 125-150cc PDFDocument83 paginiDJANGO Manual 125-150cc PDFsimrs.rsudkojaÎncă nu există evaluări
- Corbel DesignDocument107 paginiCorbel DesignMrJanji JohnyÎncă nu există evaluări
- Bridge RuleDocument105 paginiBridge Ruleamawauce78% (9)
- PetroSkills 2011 Training GuideDocument84 paginiPetroSkills 2011 Training Guidelogos123Încă nu există evaluări
- SP16-Design Aid For RC To IS456-1978Document252 paginiSP16-Design Aid For RC To IS456-1978sateeshsingh90% (20)
- Crack Width Calculation - Iit MadrasDocument7 paginiCrack Width Calculation - Iit MadrasJeet DesaiÎncă nu există evaluări
- Turbine Operation and Maintenance ManualDocument31 paginiTurbine Operation and Maintenance ManualTaufik TajudinÎncă nu există evaluări
- Copia de 2946074102 ABB ACS800 Spare PartsDocument22 paginiCopia de 2946074102 ABB ACS800 Spare PartsNatan Hernandez100% (1)
- Gemeinsam Etwas Planen b1 MT 1 5 - CompressDocument5 paginiGemeinsam Etwas Planen b1 MT 1 5 - CompressDịu Trần ThịÎncă nu există evaluări
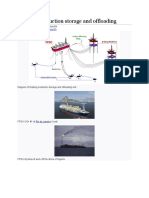
- FloatingDocument33 paginiFloatingJORDAN FREEÎncă nu există evaluări
- Design of Shallow FootingDocument28 paginiDesign of Shallow FootingDeepak Singh93% (14)
- Design of Shallow FootingDocument28 paginiDesign of Shallow FootingDeepak Singh93% (14)
- Dissertation ON Green Building Rating SystemDocument29 paginiDissertation ON Green Building Rating SystemDhananjay Gajendra100% (1)
- Interpreter of MaladiesDocument50 paginiInterpreter of MaladiesmahakÎncă nu există evaluări
- Nirma Bus RoutesDocument2 paginiNirma Bus RoutesmahakÎncă nu există evaluări
- 8Document15 pagini8api-3696315Încă nu există evaluări
- 161620157356791Document5 pagini161620157356791mahakÎncă nu există evaluări
- Elastic Analysis of Tall Reinforced Concrete Frames On Elastic Sub-Base"Document8 paginiElastic Analysis of Tall Reinforced Concrete Frames On Elastic Sub-Base"mahakÎncă nu există evaluări
- Crack Width CalculationDocument2 paginiCrack Width CalculationprabhuÎncă nu există evaluări
- CRAck WidthDocument4 paginiCRAck WidthmahakÎncă nu există evaluări
- Nirma Bus RoutesDocument2 paginiNirma Bus RoutesmahakÎncă nu există evaluări
- Tran To Pdgec 01 09 2017Document3 paginiTran To Pdgec 01 09 2017mahakÎncă nu există evaluări
- Beam Design: Beam Data Final ResultDocument2 paginiBeam Design: Beam Data Final ResultmahakÎncă nu există evaluări
- 13Document18 pagini13api-3696315Încă nu există evaluări
- RCC Design 3/7Document18 paginiRCC Design 3/7Nandan Anil GaikwadÎncă nu există evaluări
- Determination of Netural Axis and Computing Moment of ResistanceDocument14 paginiDetermination of Netural Axis and Computing Moment of Resistanceshujah1106853Încă nu există evaluări
- Bangalore Metro DBRDocument30 paginiBangalore Metro DBRmahakÎncă nu există evaluări
- Ahmedabad Station DBR 24.06.2018 R0 - DBR Comments Via Letter 220724-BLR-MEGA - 017Document40 paginiAhmedabad Station DBR 24.06.2018 R0 - DBR Comments Via Letter 220724-BLR-MEGA - 017mahakÎncă nu există evaluări
- Is 6006 1983Document22 paginiIs 6006 1983kannankrivÎncă nu există evaluări
- A-IX IRL Comments On Model DBRDocument4 paginiA-IX IRL Comments On Model DBRmahakÎncă nu există evaluări
- AFC 528 Revised Design ManualCut & Cover StruDocument51 paginiAFC 528 Revised Design ManualCut & Cover Strumahak100% (1)
- Comparative Study For Shear Design Using IRC 112 2011 IRC 21 2000 PDFDocument4 paginiComparative Study For Shear Design Using IRC 112 2011 IRC 21 2000 PDFrammirisÎncă nu există evaluări
- Voestalpine Wire Prestressing Wire Strand FolderDocument2 paginiVoestalpine Wire Prestressing Wire Strand Folderarunt_19Încă nu există evaluări
- A-IX IRL Comments On Model DBRDocument4 paginiA-IX IRL Comments On Model DBRmahakÎncă nu există evaluări
- 03-Heat Release in CombustionDocument44 pagini03-Heat Release in CombustionEvi SiswantoÎncă nu există evaluări
- LC Ladder Matching NetworksDocument33 paginiLC Ladder Matching NetworksCarriceiros TourÎncă nu există evaluări
- Licensing Process (PPT97)Document22 paginiLicensing Process (PPT97)patrick husseinÎncă nu există evaluări
- Heavy Duty Shock Absorbers HD, HDA SeriesDocument20 paginiHeavy Duty Shock Absorbers HD, HDA SeriesKarimZianiÎncă nu există evaluări
- Practice Questions Chs 21-24 1Document40 paginiPractice Questions Chs 21-24 1jevanjunior0% (1)
- Discussion Tray DryerDocument3 paginiDiscussion Tray DryerNoor Fatihah100% (1)
- ASHRAE RP-1455: Advanced Control Sequences For HVAC SystemsDocument30 paginiASHRAE RP-1455: Advanced Control Sequences For HVAC SystemscarlcrowÎncă nu există evaluări
- MOC-Vasant Delivery Checklist For Crew REV - 0 Dated 31 Aug 2020Document95 paginiMOC-Vasant Delivery Checklist For Crew REV - 0 Dated 31 Aug 2020Piyush KumarÎncă nu există evaluări
- Recirculation of Lab AirDocument1 paginăRecirculation of Lab AirAhmed LabibÎncă nu există evaluări
- Questions For Practice: Basic Training For Oil and Chemical Tanker Cargo Operation (BTOCTCO)Document38 paginiQuestions For Practice: Basic Training For Oil and Chemical Tanker Cargo Operation (BTOCTCO)Ashok YÎncă nu există evaluări
- RA Series Transfer Switches: FeaturesDocument4 paginiRA Series Transfer Switches: FeaturesJose RomeroÎncă nu există evaluări
- Singel OutdoorDocument4 paginiSingel OutdoorMuhammad WazirÎncă nu există evaluări
- Network Analysis ManualDocument68 paginiNetwork Analysis ManualRana Zeeshan AfzalÎncă nu există evaluări
- ST 50g ManualDocument103 paginiST 50g ManualrichardÎncă nu există evaluări
- 4VOL R01ipDocument9 pagini4VOL R01ipzhyhhÎncă nu există evaluări
- 435W 450W Astrotwins: Enjoy The Energy of The UniverseDocument2 pagini435W 450W Astrotwins: Enjoy The Energy of The UniverseMiro MiroÎncă nu există evaluări
- IC EnginesDocument17 paginiIC EnginesJames ContiÎncă nu există evaluări
- DOCUMENT: Electrical Standard Specification: Of: 1 Standard No. EPD - A.19Document5 paginiDOCUMENT: Electrical Standard Specification: Of: 1 Standard No. EPD - A.19Ahitworld 21Încă nu există evaluări
- Exp 05Document11 paginiExp 05Zharlene SasotÎncă nu există evaluări
- Beginner's Guide To Radio. F.JDocument82 paginiBeginner's Guide To Radio. F.Japi-3695871Încă nu există evaluări
- Solved Problems On RectifiersDocument12 paginiSolved Problems On RectifiersAravind KarthikÎncă nu există evaluări
- Chapter 5b Crystal Imperfections Dislocations PDFDocument94 paginiChapter 5b Crystal Imperfections Dislocations PDFManjeet SinghÎncă nu există evaluări
- Instruction Manual Professional Timing Light Instruction Manual Professional Timing LightDocument1 paginăInstruction Manual Professional Timing Light Instruction Manual Professional Timing LightJohn DePÎncă nu există evaluări