S-ar putea să vă placă și
- Características DinámicasDocument17 paginiCaracterísticas DinámicasAlberto Morales100% (1)
- Control en Sistemas Orden Cero, Primer y Segundo OrdenDocument6 paginiControl en Sistemas Orden Cero, Primer y Segundo OrdenFernandaÎncă nu există evaluări
- Respuesta TransitoriaDocument13 paginiRespuesta TransitoriaJulmarÎncă nu există evaluări
- Respuesta de SistemasDocument24 paginiRespuesta de SistemasCinthya RmsÎncă nu există evaluări
- Error en Estado EstacionarioDocument18 paginiError en Estado EstacionarioDaniela CruzÎncă nu există evaluări
- Respuesta TransitoriaDocument15 paginiRespuesta TransitoriaBen DerÎncă nu există evaluări
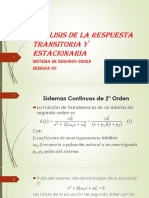
- Analisis de La Respuesta Transistoria y Estacionaria v2Document21 paginiAnalisis de La Respuesta Transistoria y Estacionaria v2Juan C GamboaÎncă nu există evaluări
- Analisis de Respuesta Transitoria de RegimenDocument24 paginiAnalisis de Respuesta Transitoria de RegimenJhonatan Choque TorrezÎncă nu există evaluări
- Analisis de Respuesta Transitoria de RegimenDocument24 paginiAnalisis de Respuesta Transitoria de RegimenJhonatan Choque TorrezÎncă nu există evaluări
- Análisis de Sistemas de 2do OrdenDocument27 paginiAnálisis de Sistemas de 2do OrdenCésar Augusto Q. LaverianoÎncă nu există evaluări
- Análisis en El Dominio Del Tiempo................Document17 paginiAnálisis en El Dominio Del Tiempo................Jhon Diego AlvaroÎncă nu există evaluări
- Análisis de La Respuesta Transitoria y EstacionariaDocument27 paginiAnálisis de La Respuesta Transitoria y EstacionariaAlfredo Gil Velasco100% (1)
- Cortes Villalvazo Gloria INSB Sistemas de Control Tarea2.2 2unidadDocument9 paginiCortes Villalvazo Gloria INSB Sistemas de Control Tarea2.2 2unidadFATIMA MARGARITA LOPEZ MAGANAÎncă nu există evaluări
- Efectos de Las Acciones de Control Integral y Derivativa en El Comportamiento Del SistemaDocument11 paginiEfectos de Las Acciones de Control Integral y Derivativa en El Comportamiento Del Sistemaalexis ayasta yncio100% (1)
- Analisis de Respuesta Transitoria 2Document44 paginiAnalisis de Respuesta Transitoria 2Yohn MartÎncă nu există evaluări
- Analisis de La Respuesta Transitoria y Estacionaria v1Document21 paginiAnalisis de La Respuesta Transitoria y Estacionaria v1Juan C GamboaÎncă nu există evaluări
- Analisis de La Respuesta Transitoria y Estacionaria v1Document21 paginiAnalisis de La Respuesta Transitoria y Estacionaria v1Juan C GamboaÎncă nu există evaluări
- Analisis de La Respuesta TransitoriaDocument6 paginiAnalisis de La Respuesta Transitoriasolo basuraÎncă nu există evaluări
- Practica de Lab1 - Tanque SimuladoDocument21 paginiPractica de Lab1 - Tanque SimuladoRoberto CastilloÎncă nu există evaluări
- Control 1competencia 3,5 Apuntes y TareasDocument24 paginiControl 1competencia 3,5 Apuntes y TareasElver GuddoÎncă nu există evaluări
- Notas de Control I 2 ParteDocument23 paginiNotas de Control I 2 ParteJunior FigueroaÎncă nu există evaluări
- Práctica de Laboratorio #3Document6 paginiPráctica de Laboratorio #3jesus de la cruzÎncă nu există evaluări
- Sistemas de Control GUIA 3Document6 paginiSistemas de Control GUIA 3LeopoldoMenesesRinconÎncă nu există evaluări
- Error en Estado EstacionarioDocument18 paginiError en Estado EstacionarioAbdul CamposÎncă nu există evaluări
- Entradas Sistemas de ControlDocument6 paginiEntradas Sistemas de ControlPaul GuachaminÎncă nu există evaluări
- T2 ControlDocument78 paginiT2 Controllenin olivaresÎncă nu există evaluări
- Ecuaciones de Primer Orden en Sistemas de ControlDocument5 paginiEcuaciones de Primer Orden en Sistemas de ControlDaluÎncă nu există evaluări
- Lectura 4Document13 paginiLectura 4Jhoon Fabricio MPÎncă nu există evaluări
- Respuestas de Sistemas de Primer y Segundo OrdenDocument11 paginiRespuestas de Sistemas de Primer y Segundo Ordennoobmaster69Încă nu există evaluări
- # 1 Modelado MatemáticoDocument33 pagini# 1 Modelado MatemáticoSamuel Granados MejíaÎncă nu există evaluări
- Analisis de Regimen Estacionario en Sistemas DiscretosDocument11 paginiAnalisis de Regimen Estacionario en Sistemas DiscretosNey Fernando AucapiñaÎncă nu există evaluări
- Análisis de La Respuesta Transitoria en El TiempoDocument15 paginiAnálisis de La Respuesta Transitoria en El TiempoSandra RodriguezÎncă nu există evaluări
- Analisis de La Respuesta TransitoriaDocument17 paginiAnalisis de La Respuesta TransitoriaEruiza35Încă nu există evaluări
- Efecto Del Factor de Amortiguamiento en Sistemas de Segundo OrdenDocument7 paginiEfecto Del Factor de Amortiguamiento en Sistemas de Segundo OrdenTu abuelita feaÎncă nu există evaluări
- Problemas de Control I - 2019 B PDFDocument6 paginiProblemas de Control I - 2019 B PDFXavier Palacios0% (1)
- Resumen Control IDDocument6 paginiResumen Control IDMarcos David Perez QuintoÎncă nu există evaluări
- Análisis de La Respuesta Transitoria y Estacionaria - 3Document24 paginiAnálisis de La Respuesta Transitoria y Estacionaria - 3Hemberth Cuadros DurandÎncă nu există evaluări
- Resumen - Sistemas de Control - Montoya EdwinDocument5 paginiResumen - Sistemas de Control - Montoya EdwinEdwin MontoyaÎncă nu există evaluări
- Sensores de Distinto OrdenDocument7 paginiSensores de Distinto OrdenEmanuel ANTRAXDÎncă nu există evaluări
- Analisis de Respuesta en El TiempoDocument19 paginiAnalisis de Respuesta en El TiempoWilberth LeoÎncă nu există evaluări
- Informe 4 Laureano Mena JhonDocument25 paginiInforme 4 Laureano Mena JhonJhon LaureanoÎncă nu există evaluări
- Respuesta Transitoria y EstableDocument13 paginiRespuesta Transitoria y Estableoscar yimy rengifo cardenasÎncă nu există evaluări
- Análisis de Sistemas de Control en El Dominio Del TiempoDocument11 paginiAnálisis de Sistemas de Control en El Dominio Del TiempoJavier Arévalo MatuteÎncă nu există evaluări
- Señales TipicasDocument14 paginiSeñales Tipicasdanis24Încă nu există evaluări
- Proyecto CT II 20201 PDFDocument9 paginiProyecto CT II 20201 PDFDaniel BoteroÎncă nu există evaluări
- Sistemas de Primer OrdenDocument25 paginiSistemas de Primer OrdenAntonio BasalduaÎncă nu există evaluări
- Análisis de Sistemas de 1er OrdenDocument25 paginiAnálisis de Sistemas de 1er OrdenRaúl QCÎncă nu există evaluări
- Diseño de Diagrama TransitorioDocument27 paginiDiseño de Diagrama Transitoriojose conÎncă nu există evaluări
- Unidad 3 - Análisis Transitorio y en Estado EstableDocument22 paginiUnidad 3 - Análisis Transitorio y en Estado Estableangel9021Încă nu există evaluări
- ANALISIS DE RESPUESTA TRANSITORIA2 (Autoguardado)Document34 paginiANALISIS DE RESPUESTA TRANSITORIA2 (Autoguardado)Mayka GarciaÎncă nu există evaluări
- Práctica 3 E1 G14Document18 paginiPráctica 3 E1 G14José Juan G.S.Încă nu există evaluări
- Dominio de Tiempo 20B FinalDocument83 paginiDominio de Tiempo 20B FinalNikol Damito FruticasÎncă nu există evaluări
- Sistema de Primer OrdenDocument30 paginiSistema de Primer Ordenpaola ordazÎncă nu există evaluări
- Tarea3 Mickeal Raad Sistema DinamicosDocument22 paginiTarea3 Mickeal Raad Sistema DinamicosMaikel RaadÎncă nu există evaluări
- Análisis de Respuesta TransitoriaDocument14 paginiAnálisis de Respuesta TransitoriaElaineÎncă nu există evaluări
- CAPITULO IV-CONTROL I Analisis de La Respuesta Transitoria y EstacionariaDocument39 paginiCAPITULO IV-CONTROL I Analisis de La Respuesta Transitoria y EstacionariaELISBAN CHILLITUPA SEGOVIAÎncă nu există evaluări
- Funcion de TransferenciaDocument14 paginiFuncion de TransferenciaSADszfdgfhgjhmj,Încă nu există evaluări
- Fitoterapia en Pediatría Patologías RespiratoriasDocument10 paginiFitoterapia en Pediatría Patologías RespiratoriasFlorÎncă nu există evaluări
- MAP-HSE-ST-109 Maniobra Izaje Esp EngDocument12 paginiMAP-HSE-ST-109 Maniobra Izaje Esp EngRodrigo PerezÎncă nu există evaluări
- Cuestionario de Hismed-Medicina GriegaDocument23 paginiCuestionario de Hismed-Medicina GriegaGabriel AlvarezÎncă nu există evaluări
- Rachel CarsonDocument1 paginăRachel Carsonvalentina ninahuanca gomezÎncă nu există evaluări
- Solución de La Tarea NDocument2 paginiSolución de La Tarea NSelene Terrones TorresÎncă nu există evaluări
- R4Document7 paginiR4quiquebravoÎncă nu există evaluări
- Tarjeta Decadactilar para ReseñaDocument3 paginiTarjeta Decadactilar para ReseñaCuervo FabioÎncă nu există evaluări
- Cultivos Naturales o ArtificialesDocument4 paginiCultivos Naturales o ArtificialesFernando Bernal DiazÎncă nu există evaluări
- Mito y Religion - Alan WattsDocument87 paginiMito y Religion - Alan WattsAmaro Fernández LópezÎncă nu există evaluări
- Bits de PerforacionDocument19 paginiBits de PerforacionExequiel Rodrigo NuñezÎncă nu există evaluări
- NTS - Trabajos en altura-BORRADOR CON FORMATODocument60 paginiNTS - Trabajos en altura-BORRADOR CON FORMATOCarlos SarmientoÎncă nu există evaluări
- Sistema de Refrigeración Por AbsorciónDocument8 paginiSistema de Refrigeración Por AbsorciónBRAYAN ELIHÚ CHIRINOS PATIÑOÎncă nu există evaluări
- Unidad 2 Cefaleas Con AudioDocument152 paginiUnidad 2 Cefaleas Con AudioJubithza Esquivias SotomayorÎncă nu există evaluări
- MakroAhorro Food 12Document17 paginiMakroAhorro Food 12Lucho ClaiÎncă nu există evaluări
- Calculo para Balanceo de Caudales y Presiones DiferencialesDocument54 paginiCalculo para Balanceo de Caudales y Presiones DiferencialesWilliamBolivarHuaracha100% (3)
- Practica 2 de ProgramaciónDocument9 paginiPractica 2 de ProgramaciónYoel GutiérrezÎncă nu există evaluări
- Normativa Asociada A Accidentes Fatales y GravesDocument8 paginiNormativa Asociada A Accidentes Fatales y GravesMartinitta TorresÎncă nu există evaluări
- GN6 SpanishDocument20 paginiGN6 SpanishflorenciaÎncă nu există evaluări
- Puente de TacomaDocument3 paginiPuente de TacomaRicardo Armando Arenales MínchezÎncă nu există evaluări
- Reglamento EsfmDocument17 paginiReglamento EsfmKeN TOPS 5Încă nu există evaluări
- ResumenDocument3 paginiResumenWidelmy CaracasÎncă nu există evaluări
- Criterios para Definir El Diámetro de Acometida y MedidorDocument10 paginiCriterios para Definir El Diámetro de Acometida y MedidorDavid NeiraÎncă nu există evaluări
- Desarrollo de Urinario y GenitalDocument15 paginiDesarrollo de Urinario y GenitalAx3L hushÎncă nu există evaluări
- Luminotecnia 133 Julio-Agosto 2016Document69 paginiLuminotecnia 133 Julio-Agosto 2016etolockaÎncă nu există evaluări
- Autoestima 7 Pasos AumentarlaDocument47 paginiAutoestima 7 Pasos AumentarlaJessica Forero100% (2)
- Tema 2 - Clasificación de Las Corrientes Eléctricas Más Utilizadas en FisioterapiaDocument7 paginiTema 2 - Clasificación de Las Corrientes Eléctricas Más Utilizadas en FisioterapiaFer Briones33% (3)
- Perspectiva General Del Laboratorio de Hematología Clínica PDFDocument7 paginiPerspectiva General Del Laboratorio de Hematología Clínica PDFJessica Izchel Velasco BarajasÎncă nu există evaluări
- Pesos Palas BucyrusDocument1 paginăPesos Palas BucyrusJuan Sepulveda MuñozÎncă nu există evaluări
- Valvulas Monobloque Sit 820 Nova PDFDocument5 paginiValvulas Monobloque Sit 820 Nova PDFLestatLodÎncă nu există evaluări
- Proyecto de ArtísticaDocument6 paginiProyecto de ArtísticaMELISSA VELEZ100% (1)