S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Siemens Disj 3WE33 NS1-A1Document42 paginiSiemens Disj 3WE33 NS1-A1Sergio Pereira100% (1)
- EmpadronamientoDocument3 paginiEmpadronamientoPrakharRastogiÎncă nu există evaluări
- Examinations For External Candidates January-March 2019: Goethe-Institut / Max Mueller Bhavan New DelhiDocument6 paginiExaminations For External Candidates January-March 2019: Goethe-Institut / Max Mueller Bhavan New DelhiPrakharRastogiÎncă nu există evaluări
- City 01 3D IndexDocument12 paginiCity 01 3D IndexazertyazertyazertyazertyÎncă nu există evaluări
- Irjet V2i3213 PDFDocument8 paginiIrjet V2i3213 PDFPrakharRastogiÎncă nu există evaluări
- Parts of An EVDocument4 paginiParts of An EVPrakharRastogiÎncă nu există evaluări
- 123Document1 pagină123PrakharRastogiÎncă nu există evaluări
- PP 1451 1460 Ganesh PDFDocument10 paginiPP 1451 1460 Ganesh PDFPrakharRastogiÎncă nu există evaluări
- Course Outcomes For SeminarDocument2 paginiCourse Outcomes For SeminarPrakharRastogiÎncă nu există evaluări
- VerbalDocument1 paginăVerbalPrakharRastogiÎncă nu există evaluări
- Mechanical Systems and Signal Processing: Alireza Pazooki, Subhash Rakheja, Dongpu CaoDocument17 paginiMechanical Systems and Signal Processing: Alireza Pazooki, Subhash Rakheja, Dongpu CaoPrakharRastogiÎncă nu există evaluări
- Copyright Transfer Agreement FormDocument1 paginăCopyright Transfer Agreement FormPrakharRastogiÎncă nu există evaluări
- Scopus Indexed Journal PDFDocument330 paginiScopus Indexed Journal PDFDharmendra PrajapatiÎncă nu există evaluări
- 3 Automotive Chassis Design v2Document62 pagini3 Automotive Chassis Design v2Leela Krishna VegiÎncă nu există evaluări
- 1 s2.0 S1877705812027798 Main - 2Document5 pagini1 s2.0 S1877705812027798 Main - 2Asev RyanÎncă nu există evaluări
- (Intro To CAE) Fundamentals of CFDDocument94 pagini(Intro To CAE) Fundamentals of CFDAhmad Reza AtefÎncă nu există evaluări
- Understanding Motor Nameplate Information - NEMA vs. IEC StandardsDocument31 paginiUnderstanding Motor Nameplate Information - NEMA vs. IEC StandardsRameez Ali FaridiÎncă nu există evaluări
- Ldce 2022Document13 paginiLdce 2022Ramesh TammineniÎncă nu există evaluări
- Industrial Alternator LSA 51.2Document12 paginiIndustrial Alternator LSA 51.2Mahmoud_ElAghouryÎncă nu există evaluări
- Stock Verification New Format 23-08-2022Document30 paginiStock Verification New Format 23-08-2022D Koteswara RajuÎncă nu există evaluări
- Guide of Methods For Determining The Condition of Stator Winding Insulation - ELT - 270 - 3 PDFDocument4 paginiGuide of Methods For Determining The Condition of Stator Winding Insulation - ELT - 270 - 3 PDFrad1962Încă nu există evaluări
- DS3 DS3E DS3L ManualDocument148 paginiDS3 DS3E DS3L Manualbui tien boÎncă nu există evaluări
- Bosch Terminal DesignationDocument7 paginiBosch Terminal DesignationFernando AguilarÎncă nu există evaluări
- Prob Set 2Document1 paginăProb Set 2Roshan meenaÎncă nu există evaluări
- C-SP-55-017 - Vertical Turbine PuDocument20 paginiC-SP-55-017 - Vertical Turbine PuEsteban Rios PitaÎncă nu există evaluări
- Pic Microcontroller Based 3 Phase Induction Motor Protection SystemDocument5 paginiPic Microcontroller Based 3 Phase Induction Motor Protection SystemNaveen ChandarÎncă nu există evaluări
- DC Motor New ChartsDocument10 paginiDC Motor New ChartsMeredith M. AndersonÎncă nu există evaluări
- E-Motor Design Using Multi-Physics Optimization: Application SheetDocument2 paginiE-Motor Design Using Multi-Physics Optimization: Application SheetburchandadiÎncă nu există evaluări
- AD - GT3L - Man-HW EN 12-07 1000073210 c1Document128 paginiAD - GT3L - Man-HW EN 12-07 1000073210 c1Mohamed Alkharashy100% (1)
- Schneider Electric Lexium LMX32C User ManualDocument412 paginiSchneider Electric Lexium LMX32C User ManualkirubaÎncă nu există evaluări
- 6 Electrical ActuatorsDocument27 pagini6 Electrical ActuatorsKennie RajÎncă nu există evaluări
- United States Patent - (191: Mayeux Et AlDocument4 paginiUnited States Patent - (191: Mayeux Et AlRodrigoPomaÎncă nu există evaluări
- 1377E说明书整理18 4 29Document18 pagini1377E说明书整理18 4 29MG MaquinasÎncă nu există evaluări
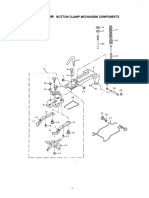
- Automated Portable Hammering Machine: ComponentsDocument2 paginiAutomated Portable Hammering Machine: ComponentsDheerajyadav YadavÎncă nu există evaluări
- Research and Design of AGV System Application Based On PLC and RFIDDocument7 paginiResearch and Design of AGV System Application Based On PLC and RFIDHo Van RoiÎncă nu există evaluări
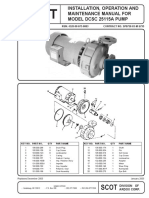
- Manual Maintenance Scot PumpDocument4 paginiManual Maintenance Scot Pumpadrian suicaÎncă nu există evaluări
- Abb Acs580 ManualDocument226 paginiAbb Acs580 ManualPercyAlvesFilhoÎncă nu există evaluări
- Rexnord Product Catalogue 2013 PDFDocument6 paginiRexnord Product Catalogue 2013 PDFMahasweta MitraÎncă nu există evaluări
- Drive Cycle SimulationDocument20 paginiDrive Cycle SimulationVc CvÎncă nu există evaluări
- University Institute Engineering Department Academic UnitDocument46 paginiUniversity Institute Engineering Department Academic UnitAkhil SainiÎncă nu există evaluări
- Energies 12 04136Document14 paginiEnergies 12 04136Rania YaseenÎncă nu există evaluări
- Eliminating Rotor ProblemsDocument6 paginiEliminating Rotor Problemssuzette TabladaÎncă nu există evaluări
- Operating Manual: Thule Rigtech VSM 100 Linear Motion Shale ShakerDocument84 paginiOperating Manual: Thule Rigtech VSM 100 Linear Motion Shale ShakerJorge Prado DiazÎncă nu există evaluări
- According To The IEC 60909Document15 paginiAccording To The IEC 60909Ten ApolinarioÎncă nu există evaluări
- Motor StarterDocument17 paginiMotor StarterSabari MÎncă nu există evaluări