S-ar putea să vă placă și
- 1993 Fuzzy Gain Scheduling of PID Controllers PDFDocument7 pagini1993 Fuzzy Gain Scheduling of PID Controllers PDFChau MaiÎncă nu există evaluări
- Processcontrol Topic13 PidtuningDocument15 paginiProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Advanced Proportional-Integral-Derivative Tuning For Integrating and Unstable Processes With Gain and Phase Margin SpecificationsDocument5 paginiAdvanced Proportional-Integral-Derivative Tuning For Integrating and Unstable Processes With Gain and Phase Margin SpecificationsSidhant SharanÎncă nu există evaluări
- Partially Supported by Funda C Ao para A Ci Encia e A Tec-Nologia, Grant SFRH/BPD/20636/2004, Funded by POCI 2010, POS C, FSE and MCTESDocument6 paginiPartially Supported by Funda C Ao para A Ci Encia e A Tec-Nologia, Grant SFRH/BPD/20636/2004, Funded by POCI 2010, POS C, FSE and MCTESVigneshRamakrishnanÎncă nu există evaluări
- Ziegler-Nichols PID Tuning Rules ExplainedDocument5 paginiZiegler-Nichols PID Tuning Rules Explainedزهراء عادل عبد الزهرة إسماعيلÎncă nu există evaluări
- Simple analytic rules for model reduction and PID controller tuningDocument19 paginiSimple analytic rules for model reduction and PID controller tuningRajendra100% (1)
- Overshoot Free Pi Controller Tuning Based On Pole AssignmentDocument5 paginiOvershoot Free Pi Controller Tuning Based On Pole AssignmentEngr Nayyer Nayyab MalikÎncă nu există evaluări
- Tuning PI Controllers For Integrator/Dead Time ProcessesDocument4 paginiTuning PI Controllers For Integrator/Dead Time ProcessesRaadBassamÎncă nu există evaluări
- The Robustness of Pi & Pid Controllers in The Presence of Sampling JitterDocument6 paginiThe Robustness of Pi & Pid Controllers in The Presence of Sampling JitterEduardo MarquesÎncă nu există evaluări
- On Tuning PI Controllers For Integrating Plus Time Delay SystemsDocument20 paginiOn Tuning PI Controllers For Integrating Plus Time Delay SystemsWenjing ZhouÎncă nu există evaluări
- 7.5 Skogestad's Method: (End of Example 7.6)Document9 pagini7.5 Skogestad's Method: (End of Example 7.6)Duc Tri BuiÎncă nu există evaluări
- Vilanova - Pid Tuning For Cascade Control System DesignDocument4 paginiVilanova - Pid Tuning For Cascade Control System DesignCarlos BellatinÎncă nu există evaluări
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocument8 paginiAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiÎncă nu există evaluări
- Applied Sciences: Equivalence Between Fuzzy PID Controllers and Conventional PID ControllersDocument12 paginiApplied Sciences: Equivalence Between Fuzzy PID Controllers and Conventional PID ControllersxXElcaXxÎncă nu există evaluări
- 10 1 1 623 275 PDFDocument28 pagini10 1 1 623 275 PDFDamir MiletaÎncă nu există evaluări
- Refinements of The Ziegler Nichols Tuning Formula C.C PDFDocument8 paginiRefinements of The Ziegler Nichols Tuning Formula C.C PDFdautroc13Încă nu există evaluări
- Tuning of PID Controllers With Fuzzy Logic: AbstractDocument8 paginiTuning of PID Controllers With Fuzzy Logic: Abstractjames100% (1)
- Controller TuningDocument7 paginiController TuningsaxenanikitaÎncă nu există evaluări
- PID Controller Tuning For Integrating and Unstable Processes With Time DelayDocument13 paginiPID Controller Tuning For Integrating and Unstable Processes With Time DelayAnonymous WkbmWCa8MÎncă nu există evaluări
- Tuning For Smooth PID Control With Acceptable Disturbance RejectionDocument6 paginiTuning For Smooth PID Control With Acceptable Disturbance RejectiondrgryÎncă nu există evaluări
- Robust Control Design Using The Pid ControllerDocument6 paginiRobust Control Design Using The Pid ControllerJocian VefÎncă nu există evaluări
- Tune PID Controller Using Ziegler-Nichols & Cohen-Coon MethodsDocument5 paginiTune PID Controller Using Ziegler-Nichols & Cohen-Coon MethodsUtkarsh SinghÎncă nu există evaluări
- A Method For The Auto-Calibration of PID ControllersDocument13 paginiA Method For The Auto-Calibration of PID ControllersJuan SantanaÎncă nu există evaluări
- 10 1 1 148 5914 PDFDocument4 pagini10 1 1 148 5914 PDFlojain centerÎncă nu există evaluări
- Tuned PID and Hybrid Fuzzy ControllersDocument9 paginiTuned PID and Hybrid Fuzzy Controllerssanyo0612Încă nu există evaluări
- New Approach for Robust PI Tuning Using Closed-Loop Setpoint ResponsesDocument6 paginiNew Approach for Robust PI Tuning Using Closed-Loop Setpoint ResponsesShamsMohdÎncă nu există evaluări
- Tuning Method of PI Controller With Desired Damping Coefficient For A First-Order Lag Plus Deadtime SystemDocument5 paginiTuning Method of PI Controller With Desired Damping Coefficient For A First-Order Lag Plus Deadtime SystemAnonymous WkbmWCa8MÎncă nu există evaluări
- Design and Implementation of A Self-Tuning Pid ControllerDocument6 paginiDesign and Implementation of A Self-Tuning Pid ControllerShreyas MaitreyaÎncă nu există evaluări
- Tuning Proportional Integral Derivative Controllers For Integrator/Deadtime ProcessesDocument4 paginiTuning Proportional Integral Derivative Controllers For Integrator/Deadtime ProcessesRicardo CampanaÎncă nu există evaluări
- Fuzzy Gain Scheduling of PID Controllers PDFDocument7 paginiFuzzy Gain Scheduling of PID Controllers PDFMiguel ZeaÎncă nu există evaluări
- Cascaded PIDDocument14 paginiCascaded PIDTatenda BizureÎncă nu există evaluări
- A Simple Method For On-Line Identification and Controller TuningDocument3 paginiA Simple Method For On-Line Identification and Controller TuningNMDVN100% (2)
- Method FuzzyDocument6 paginiMethod FuzzyAlejandroHerreraGurideChileÎncă nu există evaluări
- Real Time Temperature Control of Oven Using Matlab-SIMULINKDocument6 paginiReal Time Temperature Control of Oven Using Matlab-SIMULINKStudio gx contactÎncă nu există evaluări
- Periodic Compensation of Continuous-Time PlantsDocument7 paginiPeriodic Compensation of Continuous-Time PlantsAkila Krishnankutty PadmalathaÎncă nu există evaluări
- bài báo cáo httd cuối kìDocument7 paginibài báo cáo httd cuối kìHoàng TháiÎncă nu există evaluări
- Mu Pi Tunning GADocument6 paginiMu Pi Tunning GAmabdulkadharÎncă nu există evaluări
- A New Approach To Digital PID Controller DesignDocument6 paginiA New Approach To Digital PID Controller Designenghasan1969Încă nu există evaluări
- Self-Tuning of Fuzzy Logic Controllers in Cascade LoopsDocument8 paginiSelf-Tuning of Fuzzy Logic Controllers in Cascade LoopsCarlos BellatinÎncă nu există evaluări
- Process Control and DynamicsDocument14 paginiProcess Control and DynamicsVaibhav JaiswalÎncă nu există evaluări
- RTDA Final R PDFDocument33 paginiRTDA Final R PDFMourougapragash SubramanianÎncă nu există evaluări
- Simple Fuzzy PID Controllers For DC-DC Converters: K.-W. Seo and Han Ho ChoiDocument6 paginiSimple Fuzzy PID Controllers For DC-DC Converters: K.-W. Seo and Han Ho Choiankit407Încă nu există evaluări
- A Passive Repetitive Controller For Discrete-Time Finite-Frequency Positive-Real SystemsDocument5 paginiA Passive Repetitive Controller For Discrete-Time Finite-Frequency Positive-Real SystemsCarlos EduardoÎncă nu există evaluări
- Nazaruddin2008 PDFDocument4 paginiNazaruddin2008 PDFelva RfÎncă nu există evaluări
- Journal of Chemical Engineering of Japan, Vol. 40, No. 6Document10 paginiJournal of Chemical Engineering of Japan, Vol. 40, No. 6ShamsMohdÎncă nu există evaluări
- Servo FundamentalsDocument11 paginiServo Fundamentalsapi-3797895Încă nu există evaluări
- Ravanbod 2012Document10 paginiRavanbod 2012Janki KaushalÎncă nu există evaluări
- Robust Smith Predictor Design For Time-DDocument7 paginiRobust Smith Predictor Design For Time-DDimitris IracleousÎncă nu există evaluări
- SYSTEM OPTIMISATION: MPC vs PI ControlDocument7 paginiSYSTEM OPTIMISATION: MPC vs PI ControlAlberto Fonseca UribeÎncă nu există evaluări
- SIMC PI Tuning Rules: CG G y Y+ D 1+cg 1+cgDocument2 paginiSIMC PI Tuning Rules: CG G y Y+ D 1+cg 1+cgNuraddeen MagajiÎncă nu există evaluări
- Classical Control: Proportional, Integral, Derivative (PID) ControlDocument28 paginiClassical Control: Proportional, Integral, Derivative (PID) ControlAdil KhanÎncă nu există evaluări
- Optimal Tuning of Pi Controllers For First Order Plus Dead Time/Long Dead Time Models Using Dimensional AnalysisDocument5 paginiOptimal Tuning of Pi Controllers For First Order Plus Dead Time/Long Dead Time Models Using Dimensional AnalysisRamakrishnan Harihara VenkatasubramaniaÎncă nu există evaluări
- Ziegler-Nichols Controller Tuning ExampleDocument6 paginiZiegler-Nichols Controller Tuning ExampleChristine AvdikouÎncă nu există evaluări
- Figure 1: Air-Fuel Path (1) : Is TheDocument6 paginiFigure 1: Air-Fuel Path (1) : Is Thesopnashree jenaÎncă nu există evaluări
- Smith Predictor Best OneDocument6 paginiSmith Predictor Best OneNadia ImranÎncă nu există evaluări
- Optimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesDocument6 paginiOptimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesAnonymous WkbmWCa8MÎncă nu există evaluări
- PID ControllerDocument13 paginiPID Controllerdar20092010Încă nu există evaluări
- MachineDocument1 paginăMachineAkhilesh Kumar MishraÎncă nu există evaluări
- Drawing:: SG01 (20KAF) - 3P001-000 SPG30-20KDocument1 paginăDrawing:: SG01 (20KAF) - 3P001-000 SPG30-20KAkhilesh Kumar MishraÎncă nu există evaluări
- PapersDocument2 paginiPapersAkhilesh Kumar MishraÎncă nu există evaluări
- Figure 1Document5 paginiFigure 1Akhilesh Kumar MishraÎncă nu există evaluări
- Keep 207Document15 paginiKeep 207Akhilesh Kumar MishraÎncă nu există evaluări
- Dongalia, Distt. Khandwa (M.P) : Unit 1: December 2012 (COD) 2: March2013 (COD)Document2 paginiDongalia, Distt. Khandwa (M.P) : Unit 1: December 2012 (COD) 2: March2013 (COD)Akhilesh Kumar MishraÎncă nu există evaluări
- Ee 1002Document108 paginiEe 1002Akhilesh Kumar MishraÎncă nu există evaluări
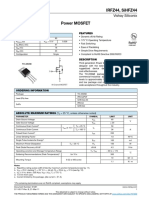
- Power MOSFET datasheet summaryDocument9 paginiPower MOSFET datasheet summaryAkhilesh Kumar MishraÎncă nu există evaluări
- PapersDocument2 paginiPapersAkhilesh Kumar MishraÎncă nu există evaluări
- ApplicationDocument1 paginăApplicationAkhilesh Kumar MishraÎncă nu există evaluări
- 8 Permutation & Combination Part 1 of 4Document5 pagini8 Permutation & Combination Part 1 of 4Akhilesh Kumar MishraÎncă nu există evaluări
- PaperDocument7 paginiPaperAkhilesh Kumar MishraÎncă nu există evaluări
- Modeling and Control of A Real Time Shell and Tube Heat ExchangerDocument9 paginiModeling and Control of A Real Time Shell and Tube Heat ExchangerAkhilesh Kumar MishraÎncă nu există evaluări
- Mi 2Document25 paginiMi 2Akhilesh Kumar MishraÎncă nu există evaluări
- 2Document3 pagini2Akhilesh Kumar MishraÎncă nu există evaluări
- Test 2Document2 paginiTest 2Akhilesh Kumar MishraÎncă nu există evaluări
- QhlogsDocument1 paginăQhlogsMohit KoladiaÎncă nu există evaluări
- Personal Detail: Online (Payment ID: 39818385 - Fee Amout: Rs. 1000/-)Document2 paginiPersonal Detail: Online (Payment ID: 39818385 - Fee Amout: Rs. 1000/-)Akhilesh Kumar MishraÎncă nu există evaluări
- UntitledDocument2 paginiUntitledAkhilesh Kumar MishraÎncă nu există evaluări
- Academy of Technology,: Proctorial Board Cum Anti Ragging Committee SESSION - 2010-11Document1 paginăAcademy of Technology,: Proctorial Board Cum Anti Ragging Committee SESSION - 2010-11Akhilesh Kumar MishraÎncă nu există evaluări
- Experiment No: Object Requirement:-S.N. Apparatus Type Range Qty. RemarkDocument4 paginiExperiment No: Object Requirement:-S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraÎncă nu există evaluări
- Experiment No: Object:-RequirementsDocument4 paginiExperiment No: Object:-RequirementsAkhilesh Kumar MishraÎncă nu există evaluări
- RLC Circuit Transient and Frequency Response LabDocument2 paginiRLC Circuit Transient and Frequency Response LabAkhilesh Kumar MishraÎncă nu există evaluări
- Lecture Notes ME 269: Ayman El-Hag DC Machine Part No. 1 Basic Principles and Physical ConstructionDocument17 paginiLecture Notes ME 269: Ayman El-Hag DC Machine Part No. 1 Basic Principles and Physical ConstructionAkhilesh Kumar MishraÎncă nu există evaluări
- Experiment No: Verification of Kirchhoff's Voltage Law (KVL) Requirement:-S.n. Name of Equipment Type Range Qty. RemarkDocument3 paginiExperiment No: Verification of Kirchhoff's Voltage Law (KVL) Requirement:-S.n. Name of Equipment Type Range Qty. RemarkAkhilesh Kumar MishraÎncă nu există evaluări
- Experiment No Object:-: Requirement:-S.n. Name of Apparatus Type Range/rating Qty RemarkDocument4 paginiExperiment No Object:-: Requirement:-S.n. Name of Apparatus Type Range/rating Qty RemarkAkhilesh Kumar MishraÎncă nu există evaluări
- PN Junction Diode Characteristic StudyDocument4 paginiPN Junction Diode Characteristic StudyAkhilesh Kumar MishraÎncă nu există evaluări
- Experiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkDocument2 paginiExperiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraÎncă nu există evaluări
- Electrical Engineering Network Lab Negative Impedance Converter & Gyrator Circuit ExperimentsDocument5 paginiElectrical Engineering Network Lab Negative Impedance Converter & Gyrator Circuit ExperimentsAkhilesh Kumar MishraÎncă nu există evaluări
- Dermatitis Venenata Donald UDocument5 paginiDermatitis Venenata Donald UIndahPertiwiÎncă nu există evaluări
- Om 08.12.2022Document18 paginiOm 08.12.2022raviÎncă nu există evaluări
- Adverse Drug Reactions in A ComplementaryDocument8 paginiAdverse Drug Reactions in A Complementaryrr48843Încă nu există evaluări
- Cyolo Datasheet 2022 - Driving Digital BusinessDocument3 paginiCyolo Datasheet 2022 - Driving Digital BusinessAlexis MoralesÎncă nu există evaluări
- SteroidsDocument2 paginiSteroidsShawn FreemanÎncă nu există evaluări
- Tax Invoice: New No 30, Old No 24 Bhagirathi Ammal ST, T Nagar, Chennai 600017 CIN: U74900TN2011PTC083121 State Code: 33Document1 paginăTax Invoice: New No 30, Old No 24 Bhagirathi Ammal ST, T Nagar, Chennai 600017 CIN: U74900TN2011PTC083121 State Code: 33golu84Încă nu există evaluări
- Procurement of Railway Infrastructure Projects - ADocument15 paginiProcurement of Railway Infrastructure Projects - ADan NanyumbaÎncă nu există evaluări
- What Are The Main Purpose of Financial Planning AnDocument2 paginiWhat Are The Main Purpose of Financial Planning AnHenry L BanaagÎncă nu există evaluări
- Grid Infrastructure Installation and Upgrade Guide Ibm Aix Power Systems 64 BitDocument284 paginiGrid Infrastructure Installation and Upgrade Guide Ibm Aix Power Systems 64 BitAntonioÎncă nu există evaluări
- AbolethDocument3 paginiAbolethjlewis_4Încă nu există evaluări
- Attaei PDFDocument83 paginiAttaei PDFHandsomē KumarÎncă nu există evaluări
- Community Health Nursing Family Nursing AssessmentDocument2 paginiCommunity Health Nursing Family Nursing AssessmentRy LlanesÎncă nu există evaluări
- Powerful Technical Computing with MathematicaDocument3 paginiPowerful Technical Computing with MathematicazoksiÎncă nu există evaluări
- Chapter 7, 8, 9Document11 paginiChapter 7, 8, 9Rubilyn IbarretaÎncă nu există evaluări
- School Development Plan 2022Document3 paginiSchool Development Plan 2022Nora Herrera100% (6)
- Project Proposal ApprovedDocument2 paginiProject Proposal ApprovedRonnel BechaydaÎncă nu există evaluări
- Currency Exchnage FormatDocument1 paginăCurrency Exchnage FormatSarvjeet SinghÎncă nu există evaluări
- rfg040208 PDFDocument2.372 paginirfg040208 PDFMr DungÎncă nu există evaluări
- Contract Management Software BenefitsDocument9 paginiContract Management Software BenefitsYashas JaiswalÎncă nu există evaluări
- SC WD 1 WashHandsFlyerFormatted JacobHahn Report 1Document3 paginiSC WD 1 WashHandsFlyerFormatted JacobHahn Report 1jackson leeÎncă nu există evaluări
- Form 5420 5 General Food Defense PlanDocument11 paginiForm 5420 5 General Food Defense PlanBenjamin AlecÎncă nu există evaluări
- L5 Isomerism 3Document16 paginiL5 Isomerism 3Cheng FuÎncă nu există evaluări
- Consular Assistance For Indians Living Abroad Through "MADAD"Document12 paginiConsular Assistance For Indians Living Abroad Through "MADAD"NewsBharatiÎncă nu există evaluări
- Dialysis PowerpointDocument10 paginiDialysis Powerpointapi-266328774Încă nu există evaluări
- Trainee Accountant Job DescriptionDocument5 paginiTrainee Accountant Job DescriptionNelly PilcoÎncă nu există evaluări
- Hiata 2Document21 paginiHiata 2AnnJenn AsideraÎncă nu există evaluări
- Build A Tunnel: What You NeedDocument2 paginiBuild A Tunnel: What You NeedManila Business ShopsÎncă nu există evaluări
- GRADE-7 computer-MODULEDocument4 paginiGRADE-7 computer-MODULECzz ThhÎncă nu există evaluări
- Appetizers Fire-Grilled Gourmet Burgers: Red Robin'S Finest Burgers Red'S Tavern MenuDocument2 paginiAppetizers Fire-Grilled Gourmet Burgers: Red Robin'S Finest Burgers Red'S Tavern MenufruitfuckÎncă nu există evaluări
- tmp1AE2 TMPDocument8 paginitmp1AE2 TMPFrontiersÎncă nu există evaluări